系统安装
一、下载系统镜像
默认是在树莓派4B上安装ubuntu mate系统,当然可以安装其他的系统,这里不做介绍。Ubuntu MATE是Ubuntu Linux官方的一个派生版,基于桌面环境MATE,使用MATE桌面环境由已经停止官方维护的GNOME2源代码派生而来。
Ubuntu MATE系统镜像官方下载地址:https://ubuntu-mate.org/download/
在上面的官方链接中找到下图版本,有32位和64位版本,树莓派4B是64位的cpu所以选择64bit版,点击就会进入下载界面。

会看到有两个版本,一般选择LTS版,就是(Long Time Support),即下图左边的版本。
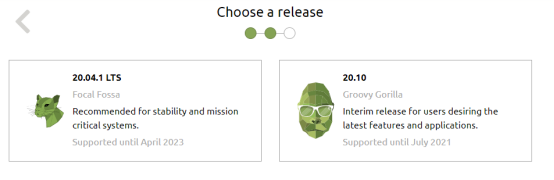
点击后会看到有三种方式下载,可选择BT下载,磁力链接下载,直接下载。根据实际情况选择,都可以。

下载完成后会得到一个压缩文件

解压后,就会得到系统映像文件,大概在5G左右

之后就可以用此文件进行系统的烧写
在烧写系统前要准备一些软件分别是SD卡格式化软件SDFormatter和映像烧写软件Win32DiskImager。
工具下载链接:点击下载
格式化SD卡
将树莓派4B上的内存卡拔出,装在读卡器上,插入PC电脑的usb口上。打开SDFormatter程序。会见到如下界面。

在Drive那选择你读卡器的盘符。我这里是F盘,实际根据自己电脑选择。如果是要重新安装系统,在已经装了系统的SD上,就会出现Size只有40多MB的情况。那么就要点击选项设置选择逻辑大小调整,选择为开启,点击ok(无论sd卡中有没有系统,都可以执行此步操作)。

然后点击格式化,会提示,点击确定就好了

接着,继续点击确定

稍等片刻,格式化就完成了,点击确定后就可以退出这个软件了。

系统映像烧写:
打开Win32DiskImager程序,界面如下所示。在Device那选择你读卡器的盘符。我这里是F盘,实际根据自己电脑选择。

然后点击此界面上的蓝色文件夹图标,选择系统映像文件,就是之前我们解压出来的那个文件。找到文件位置后选中后点击打开。

选择完成后如下图所示,然后直接点击write

出现提示点击Yes

然后会开始烧写系统了,等待时间比较久,耐心等待。完成后会出现下图提示,点击ok就可以退出这个程序了。

在PC电脑上弹出读卡器,把SD卡插回树莓派4B的SD卡插槽上,连上显示屏、鼠标、键盘后,上电启动系统。
系统安装配置:
等待片刻后出现下图,选择语言,这里选择默认的English,点击Continue

选择键盘,默认English(US)就行,点击Continue

选择是否连接网络,根据自己需求来,这里默认选没网络,点击Continue

选择地区,鼠标再地图上点击大概位置就行了,选择shanghai,点击Continue

填写系统名、登录密码,这里默认填写ubuntu、密码是admin,选中 log in automatically,即开机不用输入密码自动登录。点击Continue

等待系统自己初始化完成即可。

完成后会自动进入系统桌面。
接下来讲在ubuntu mate环境下如何通过python控制GPIO引脚
https://blog.csdn.net/ourkix/article/details/113417800
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)