文章目录
- 1.引言
- 2. 算法理论
- 2.1 MSF基本模型
- 2.2 预测
- 2.3 测量与更新
- 3. 核心代码分析
- 4. 代码实战
1.引言
本文的多传感器融合是建立在读懂《Quaternion kinematics for the error-state Kalman filter》基础上的 ,是一种相机和IMU融合的理论,里面讲解了IMU的误差状态运动方程构建。误差状态四元数,是有开源的程序的,但是它是集成在rtslam里面的,不方便提取出来使用。
但还有另外一个开源的程序,ETH的MSF,可以比较方便地用在自己的工程里面,并且它的理论与误差状态四元数很接近,稍微有点不同,所以MSF开源程序就成了一个不错的选择。
所以本人研究了ETH的两篇文章:《Vision Based Navigation for Micro Helicopters》和《A Robust and Modular Multi-Sensor Fusion Approach Applied to MAV Navigation》
其核心就是扩展卡尔曼滤波EKF,本人把MSF的核心代码阅读了一遍,推导了论文中的算法,并最后做了实验。
2. 算法理论
MSF关键点:
- 我们使用IMU含噪声的测量值和bias去计算估计状态量X。并且没有考虑测量值的噪声项和扰动,从而产生了误差。我们把所有不确定性引来的误差放在误差变量δx中考虑,并推导了误差状态运动模型,以此求解Fd状态转移矩阵和P过程协方差矩阵
- 利用其它来源的数据如GPS,视觉等来作为矫正(使误差可观)。通过估计状态量X计算Hj,利用观测量和估计量计算残差,最后计算K,来更新P和误差变量δx,最后更新状态量X。
2.1 MSF基本模型
基本模型如下图所示。MSF的可扩展性很好,程序里可以接入新的传感器,比如GPS,激光雷达,码盘。
 下图是msf的原理示意图:
下图是msf的原理示意图:

下图是eskf中所有变量解释表

2.2 预测
状态表示:

理想运动模型:

实际运动模型:

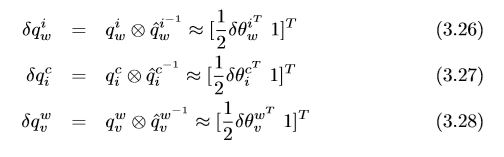
误差状态表示:

误差运动状态模型:
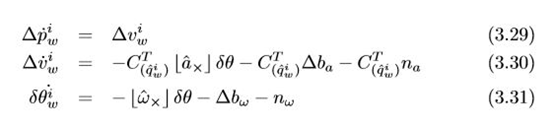
注意:在eskf中有详细推导和解释

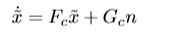
误差状态导数的转移矩阵:
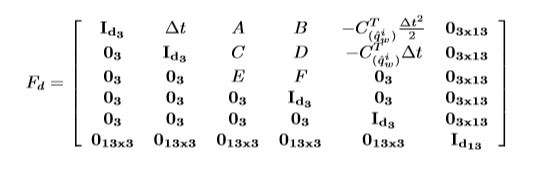
二阶泰勒展开(忽略二阶以上微小量):

误差状态的转移矩阵:
预测误差状态和预测误差差协方差矩阵:

2.3 测量与更新
p测量模型:

q测量模型:

测量更新:

3. 核心代码分析
核心算法的代码分析如下图所示:

预测与更新算法调用关系图:

4. 代码实战
msf-ethsal编译及使用
相机IMU融合四部曲(三):MSF详细解读与使用
基本操作
roslaunch msf_updates position_pose_sensor.launch
roslaunch msf_updates viconpos_sensor.launch
rosrun rqt_reconfigure rqt_reconfigure#初始化卡尔曼滤波器,很重要!!
如下界面,需要点击filter

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)