如果说音色是声学中的玄学,那么pid可以算是工学中的玄学。难就难在需要复杂的调试才能找到一个合适值。临界值需要自己去试。在临界值之前,或许有一个可以把握的趋势。突破临界值立马就正变负负变正。《论语》里讲:过犹不及。说话办事也好,工作生活也罢,如果不能做到进退有度,取舍有法,就很可能陷入物极必反的窘境中。或者说是过犹不及,稍有不慎,原本正常还能飞的飞机可能变得就无法操控了。
P ID到底是个什么东西?
P是比例,i是积分,d是微分。
Pid控制在工程上有广泛的应用。不需要精确的数学模型,尤其是用于复杂的非线性系统。通过调整三个参数实现稳定的控制。
比例是p。比例据说决定着响应的速度,反应的速度。在操作时的稳定性一些动态指标。这个过高的响应快对于追求速度和灵敏性的飞机或许是好事。但是对于追求精确度,稳定性的飞机未必是好事。因为很难通过一个参数来确定你所需要的位置。所以说可能会需要你反复的在修正。就好比你站在翘翘板上。偏左了,你抓紧往右跑。偏右了,你抓紧往左跑。颤颤微微很难保持一个稳定的姿势。最后导致不停的颤。如果要用丝滑的操作还得用到后边的。
积分是I,积分影响稳态精度,据说类似于一个阻尼器。用来消除系统的误差。积分会带来相位滞后。积分值如果过大,同样会引起系统的不稳定。还比如你站在翘翘板上。此时你不管向左或者向右。板子上涂了胶会影响你的速度。你的动作不再那么迅捷。但是,也趋于稳定。这个值太大了也不行,会让你行动迟钝。
微分是d。他影响偏差变化率,据说它的原理是提前加入误差的修正功能。消除过大的误差,从而优化积分对系统响应速度阻滞,但是他的数值太大了,也会造成误差的误差。进一步破坏系统的稳定性。
通通这些在mission planner都是有限制的。也就是说你不可能无限制的调整微分积分比例。有的是相互引用的关系。一个确定了,下一个可能只能调小而无法克服上限。这些都是在计算后所进行的系统的限定。总体是会趋向与保证系统的稳定性。
也正因为pId调参如此的个性化,很难找到一个完美的参数。只能自己去试了。但还是有一些规律性的东西和限制性的因素可以供我们参考。
开始操作。
首先确定你的飞机可以正常解锁加速度计遥控器都已经完成校准,飞行模式设置正确。
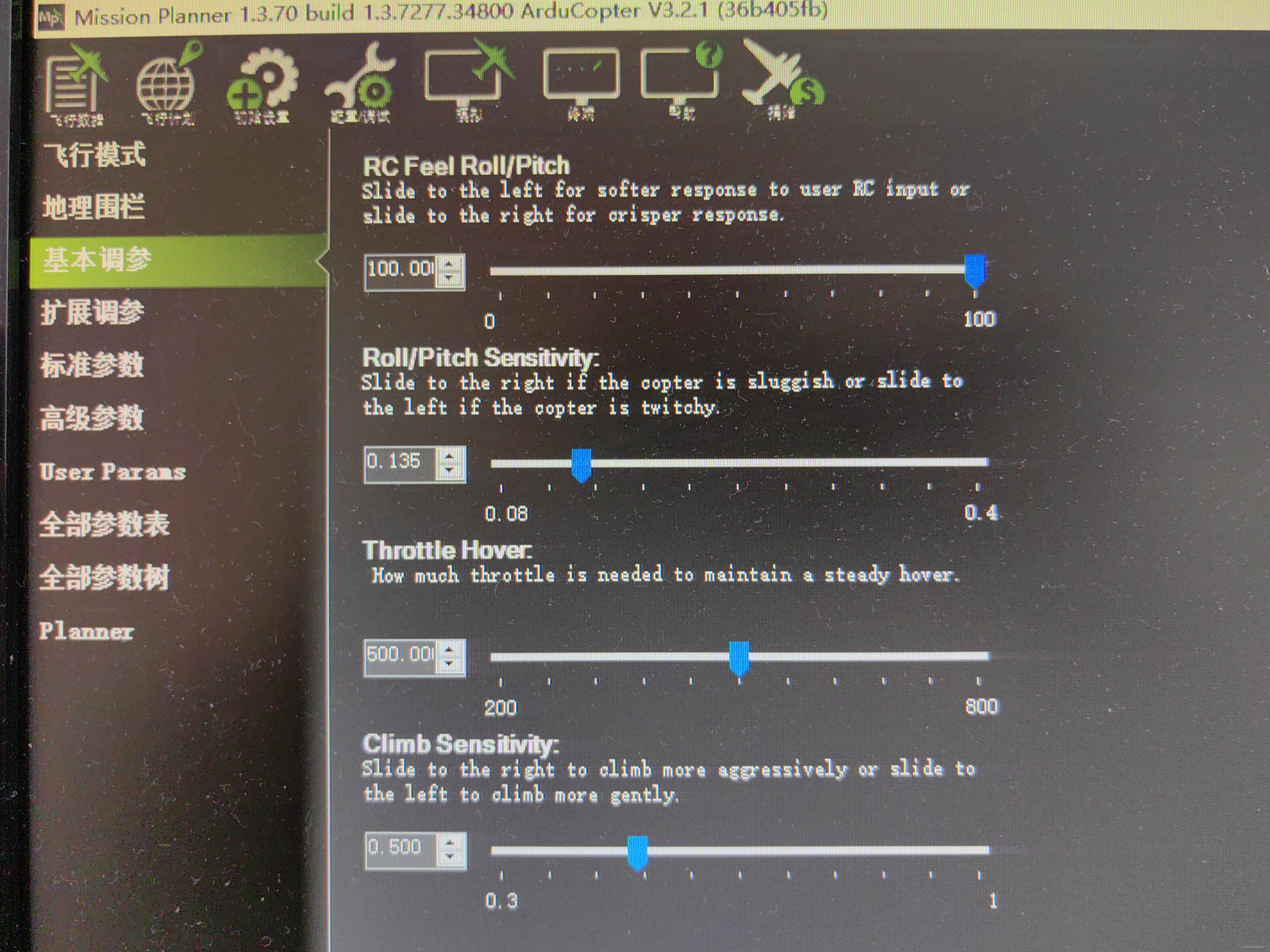
基本调参,在另外一篇文章当中有详细解读。
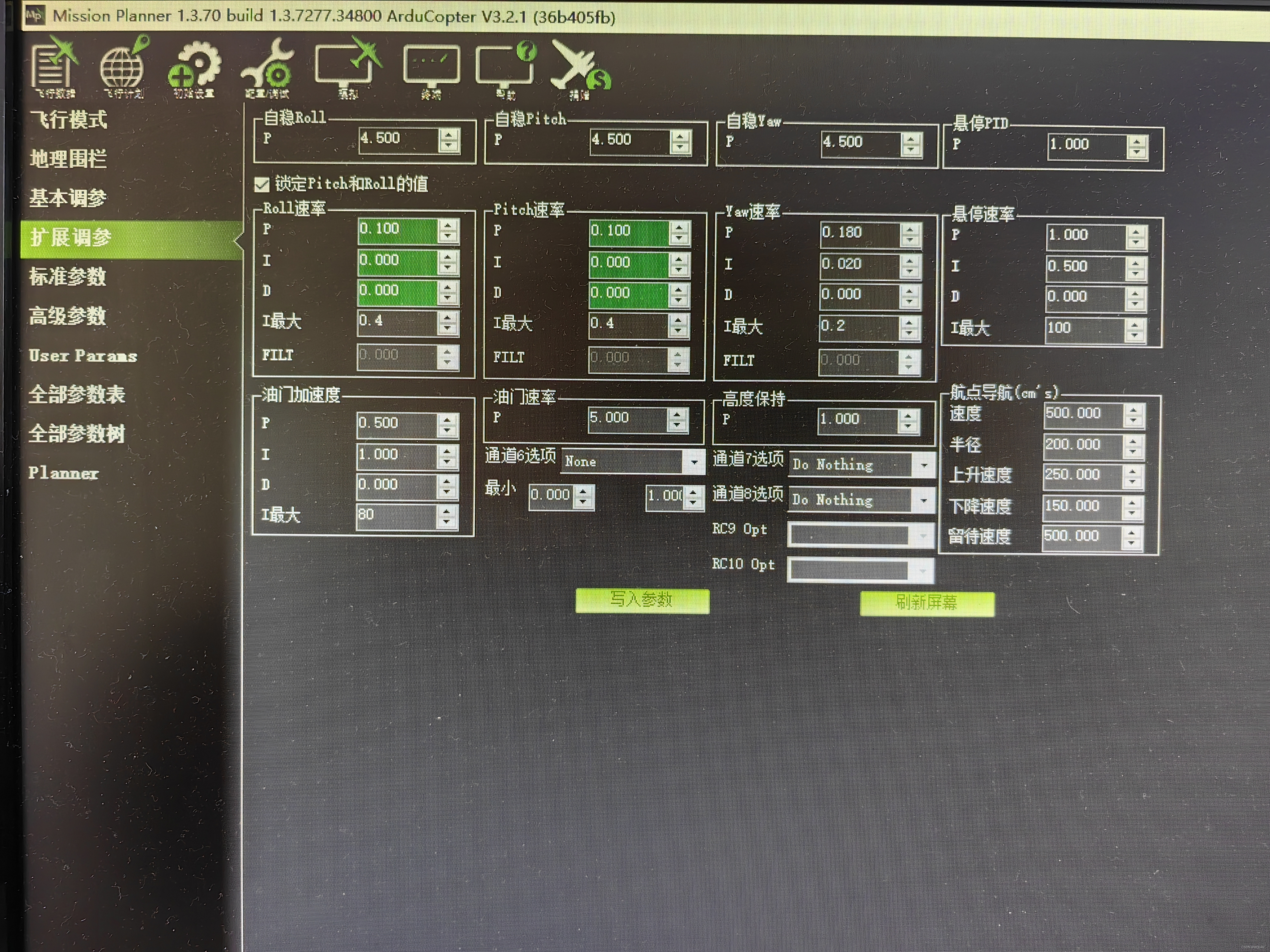
这里我们直接进入扩展调参。

观察默认值。免得调远了还得再回到原点。
可以解除俯仰和滚转锁定,为了省事儿,先同时调试一下。不建议这样。
因为默认值起飞后直接抖的厉害,所以说直接将p值调的小一些。将另外两个值直接改为0。
再次起飞,抖的比较幅度小了。
再次缩小p值。直接跳过了千分位,直接从百分位开始。

修改后底色变成了绿色,这时候如果确定的话,需要点写入参数才能到达飞控。
断开连接,拔掉USB。再次起飞测试。
反复微调,直到飞机不再抖动。
300轴距左右的飞机,P值在0.070左右抖动基本停止。
这一步稳定了,下一步就是I的值。
如果操作俯仰滚转存在惯性,既不能够立即执行你的操作,有一定的缓冲。这个时候可以减少它的值。当然这个值也不是说大好或者小了好。太灵敏了,会使操作一直在进行微调,无法稳定下来。太迟缓了,会在危急的时刻无法将飞机挽回。所以说太急躁不行,太拖沓也不行。
下一步就是调整D
可以通过快速操作水平位移看响应效率。如果能和这个值得响应是适当的。这个和遥控响应的效率也有关系。但并不是越灵敏越好。过大了又会导致飞机的震颤。
因此这几个值得调整,可能是一个循环往复的过程。需要在摸索当中尝试。或许没有最好,只有更好。或许更好,再进一步就是更烂。都有可能。
也有一些简单的办法。比如买飞控的话,厂家会在个性定制的地面站提供一些不同轴距所适合的参数。直接导入飞控,就省了很多功夫。
还有就是借助第三方软件专门来调整。网上也有免费的。
但话说回来并不是存在一个放之四海而皆准的参数。你觉得好的参数,别人未必觉得上手就能很顺。别人调好的参数,你可能也操作不来。这就和驾车一样。同一款车,有的人喜欢暴力驾驶,有的人就开的很温和。没有一个固定的标准,说哪个好哪个坏。因人而异,因地制宜吧。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)