目录
1.卫星地图上规划普通航点
2.曲线航点
3.规划多边形区域
4.环形航线
5. 曲线航线
6.设置网格
7.特殊航线
学习地面站,不可避免要触及英文指令。通过经常使用日常积累,可以熟练掌握各个指令的含义。serve the people heart and soul,通过类比,我们可以得知servo是伺服系统的含义。在没有搞明白各个指令具体含义和参数设置要求前,不能轻易规划涉及指令的航线并进行室外无系留飞行,否则有无人机失控丢失或造成地面事故的风险。
通过地面站Mission Planner对APM或PIX飞控,规划航点航线应该选择国内可用的卫星地图。

可供使用的有必应地图、高德地图等。
1.卫星地图上规划普通航点
步骤:
1.菜单栏——飞行计划——加载所需地图。
2.在地图上点击左键,创建航点。

3.下方出现航点数据。
WAYPOINT:默认航点命令
Lat:经度
Long:维度
Alt:海拔高度
删除:删除航点
向上:改变航点的顺序
向下:改变航点的顺序
Angle:爬升的角度
距离:与上一个航点的距离
方位:以上一个航点为原点建立坐标系,方位角又称地平经度(Azimuth (angle)缩写Az),是在平面上量度物体之间的角度差的方法之一。是从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角。
航点命令
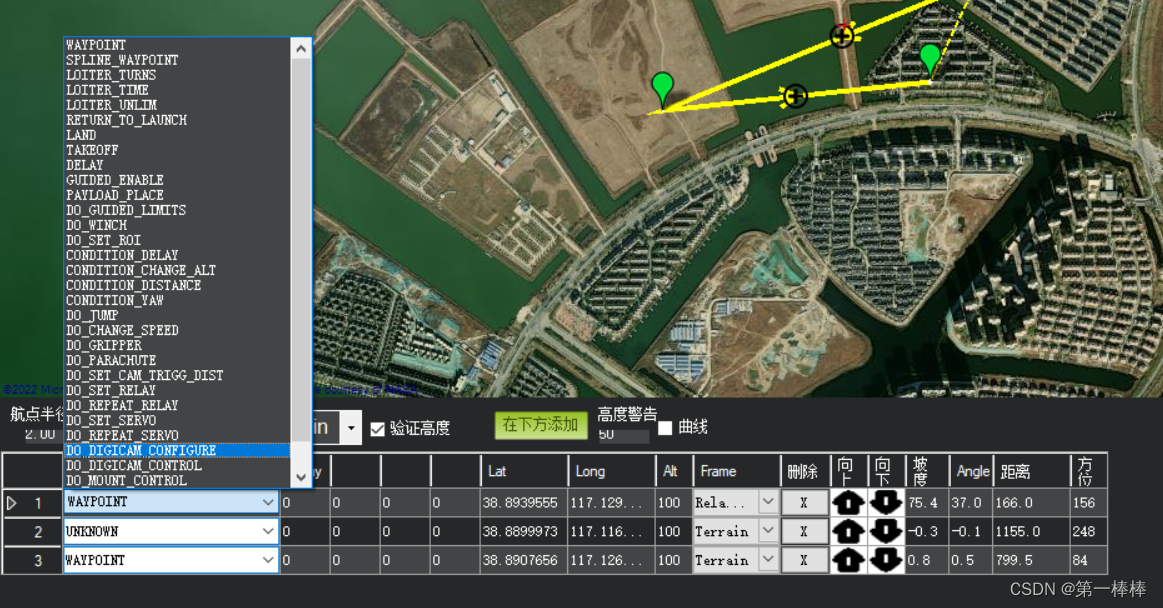
WAYPOINT
– 导航到指定位置
SPLINE_WAYPOINT
– 使用曲线路径导航到目标位置
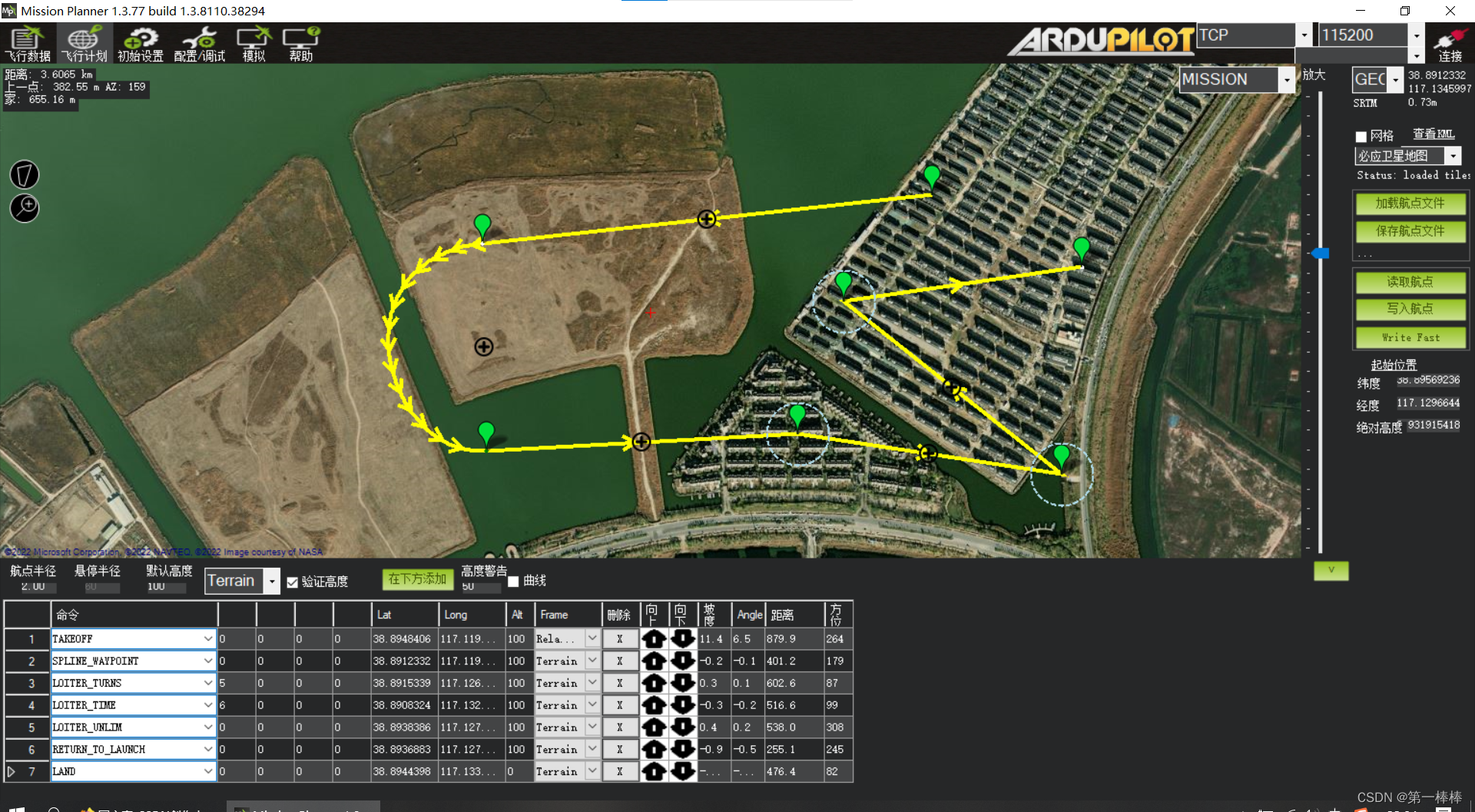
LOITER_TURNS
– 在指定位置盘旋,指定的圈数
LOITER_TIME
– 在指定位置盘旋,指定的时间
LOITER_UNLIM
– 在指定位置一直盘旋
RETURN_TO_LAUNCH
– 如果距离较近则返回起始位置或者最近的集结点。
– 起始位置为无人机最后一次就绪的地方(或者是第一次被GPS锁定的地方,如果车辆配置允许)
LAND
– 将无人机降落在当前或指定地点
TAKEOFF
– (从地面起飞或手动发射)。它应该是几乎所有飞机和直升机任务的第一指令
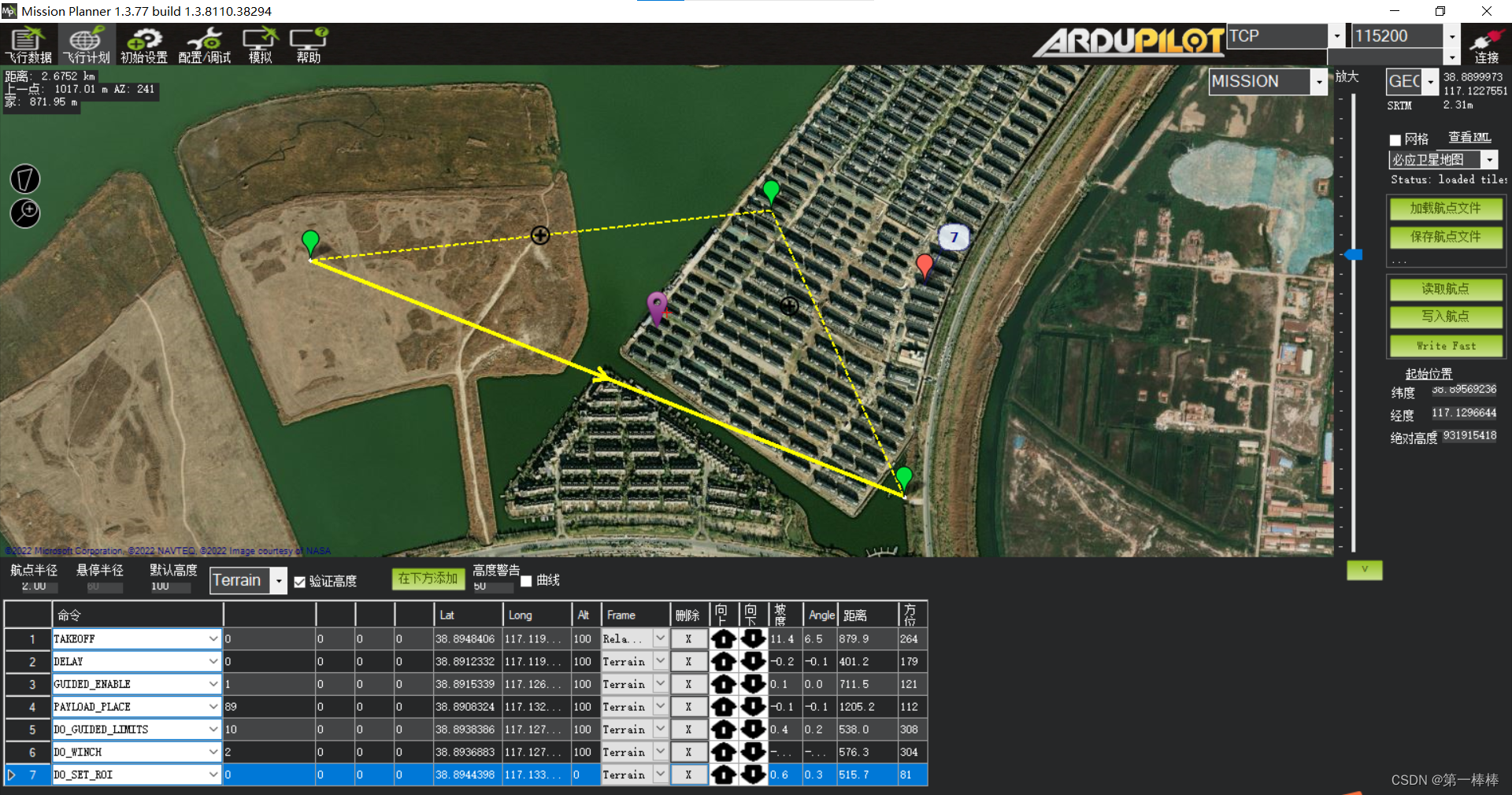
DELAY
– 延迟。设置后会直接跳过该点,而后链接到下一航点。
GUIDED_ENABLE
– 启用GUIDED模式将控件移交给外部控制器。on=1,off=0。设置后会直接跳过该点,而后链接到下一航点。
PAYLOAD_PLACE
– 有效载荷位置
DO_GUIDED_LIMITS
– 设置外部控制的限制,设置后会直接跳过该点,而后链接到下一航点。
DO_winch
– 吊起。设置后出现紫色标记点,无对应航线,该点不可拖动。
DO_SET_ROI
– 设置传感器组或无人机感兴趣区域(ROI)。设置后出现红色标记点,但是无对应航线。该点可以拖动。
– 然后控制系统可以使用它来控制姿态和各种传感器的姿态
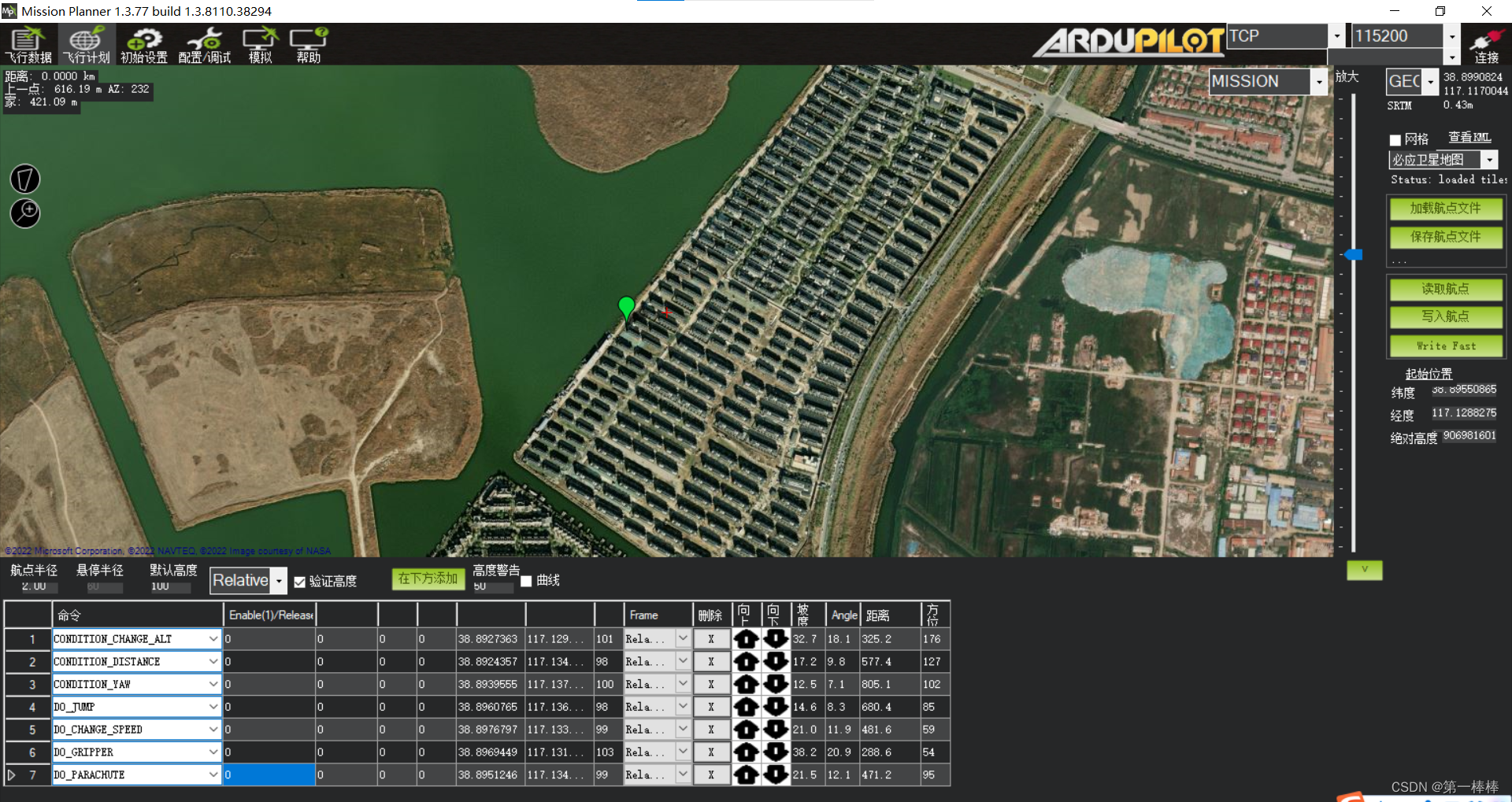
CONDITION_DELAY
– 延迟指定秒数执行下一个条件"DO"命令。设置后航点消失。
CONDITION_CHANGE_ALT
Rate : 上升/下降速度,单位:cm/s
– 以指定的速度上升/下降到给定的高度(将覆盖下一个航点中使用的值)。设置后该航点消失。
– 任何“DO”与路径相关的命令将推迟直到达到想要的高度
CONDITION_DISTANCE
– 延迟开始下一个"DO"命令直到距离下一个航点指定距离(米)。设置后该航点消失。
CONDITION_YAW
– 将无人机的前端指向指定航向。设置后该航点消失。
DO_JUMP
– 跳转到任务列表中的指定命令,跳转命令可以在继续执行任务之前跳转指定次数。设置后该航点消失。
WP# : 要跳转到的命令索引/序列号
Repeat# : 重复次数,如果为0将直接进行下一个命令的执行,如果为-1将无限次执行
DO_CHANNGE_SPEED
– 改变目标水平速度或无人机的油门,更改将持续到下次更改或设备重启。设置后该航点消失。
DO_GRIPPER
– 操作EPM夹持器的任务命令。设置后该航点消失。
DO_PARACHUTE
– 触发降落伞的任务命令(如果启用)。设置后该航点消失。
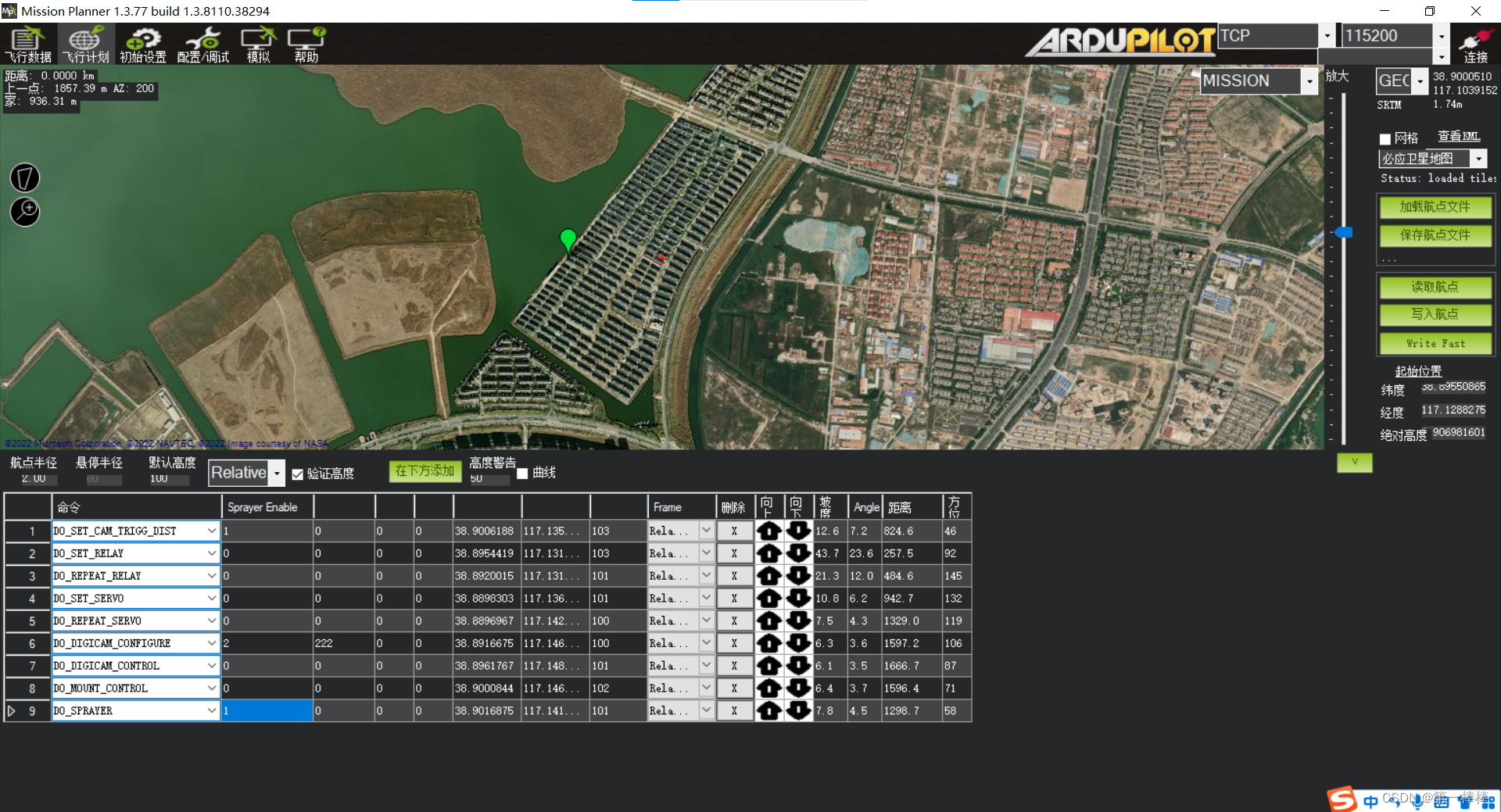
DO_SET_CAM_TRIGG_DIST
– 每隔一定距离触发一次相机快门。设置后该航点消失。
DO_SET_RELAY
– 设置继电器引脚的电压高(开)或低(关)
Relay No : 继电器的编号 off(0)/on(1) : 设置继电器状态,0为低/关、1为高/开
DO_REPEAT_RELAY
– 在给定的时间段内将继电器引脚的电压/状态切换指定的次数。设置后该航点消失。
– 如一开始为开,切换变为关,再切换变为开
Relay No : 继电器编号 Repeat# : 重复次数 Delay : 指定的时间
DO_SET_SERVO
– 给指定的伺服机构设置为特定的PWM值。设置后该航点消失。
Ser No : 伺服编号,目标伺服输出引脚/通道编号 PWM : PWM值
DO_REPEAT_SERVO
– 将伺服PWM输出引脚在其中间位置值和指定的PWM值之间在一定的时间循环指定次数。设置后该航点消失。
Ser No : 伺服编号,目标伺服输出引脚/通道编号 PWM : PWM值
Repeat# : 循环次数 Delay : 指定时间
DO_DIGICAM_CONFIGURE
– 配置相机控制器系统。设置后该航点消失。
Mode : 设置相机模式。1、ProgramAuto 2、光圈优先 3、快门优先 4、手动
5、IntelligentAuto 6:SuperiorAuto
Shutter Speed : 快门速度。所以如果速度是1/60秒,输入的值是60,最慢支持1秒
Aperture : 光圈,F停止编号
ISO : ISO数字,如80、100
第7项 : 摄像机触发前的主发动机切断时间(秒/ 10)(0表示无切断)
DO_DIGICAM_CONTROL
– 控制摄像机控制器系统。设置后该航点消失。
– 触发相机快门一次
On/Off : 开/关或显示/隐藏镜头: 0:关掉相机/隐藏镜头 1:打开相机/显示镜头
Zoom Position : 变焦的绝对位置,如2x、3x、10x
Zoom Step : 缩放步长值以从当前位置偏移缩放
Focus Lock : 聚焦锁定,解锁或重新锁定: 0:忽略 1:解锁 2:锁定
Shutter Cmd : 快门指令,任何非零值都会触发相机
DO_MOUNT_CONTROL
– 控制摄像机或天线安装的任务命令。设置后该航点消失。
Pitch : 俯仰角度 Roll : 滚动角度 Yaw : 航向角度
DO_SPRAYER
– 控制喷雾器任务命令。设置后该航点消失。
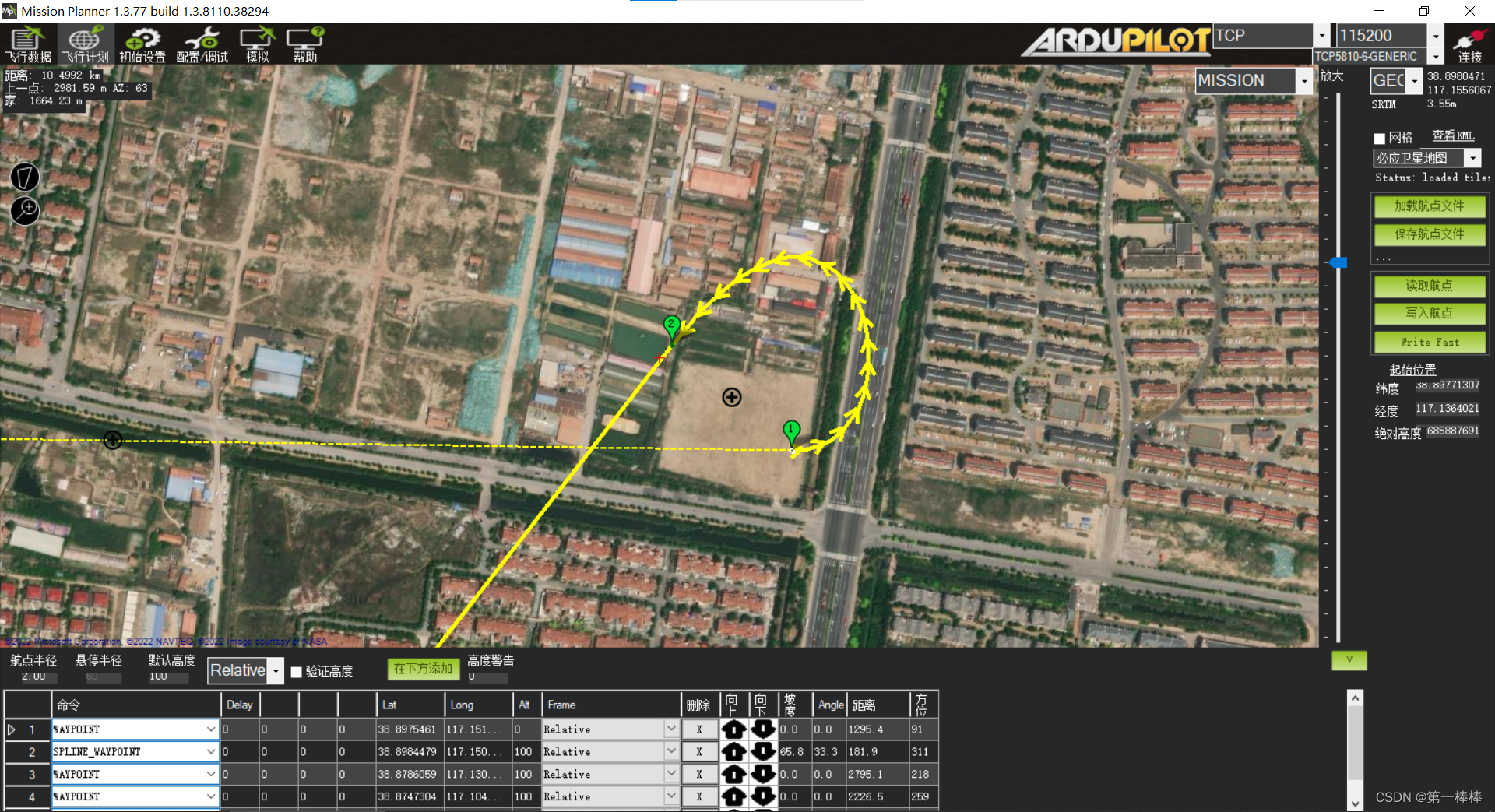
2.曲线航点
步骤:
1.点击飞行计划
2.鼠标右键——插入曲线航点
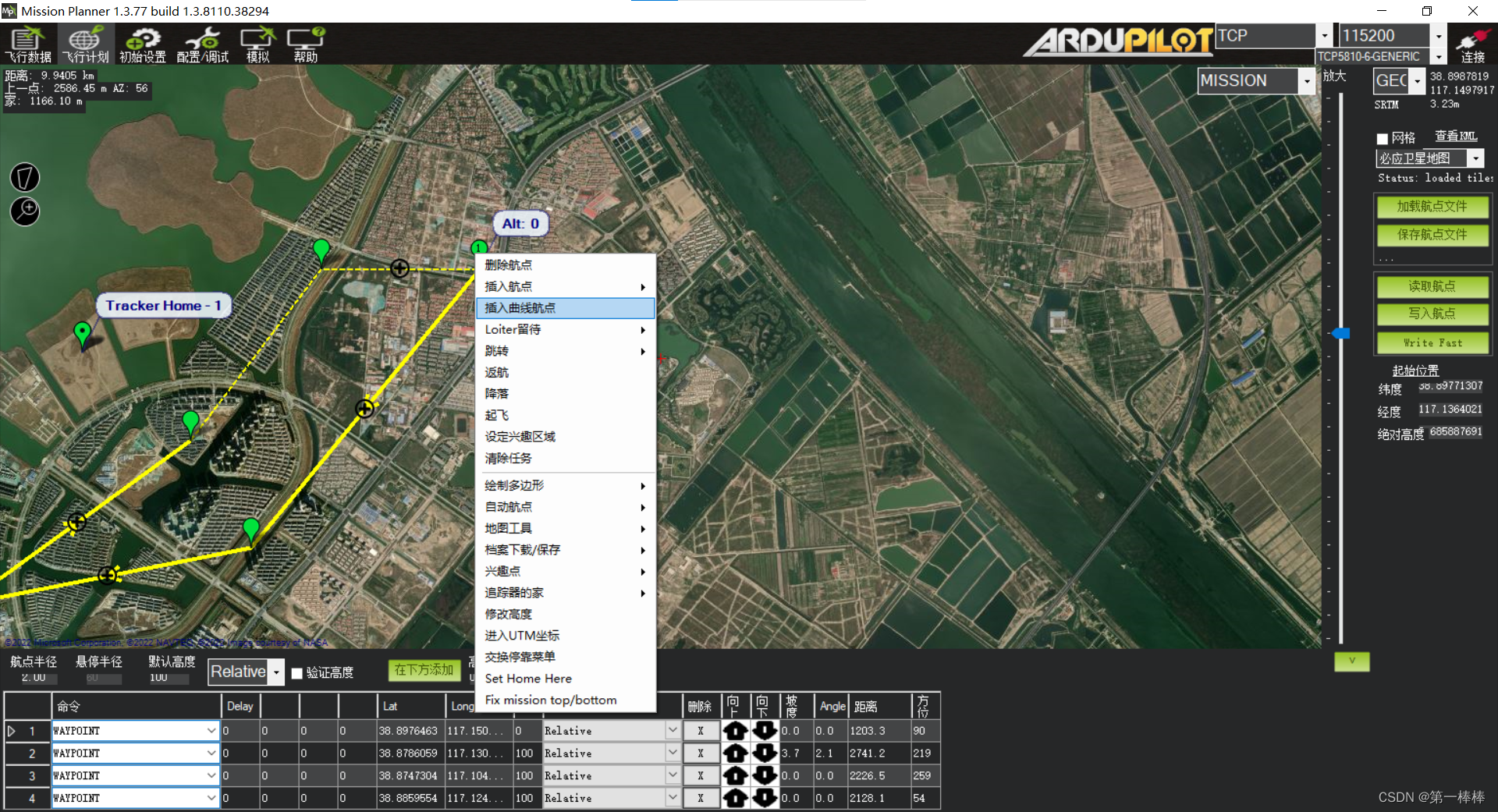
3.设置在几号航点后插入。
Insert WP after wp#
4.拖动航点,设置曲线形状。新航点显示为spline-way point。
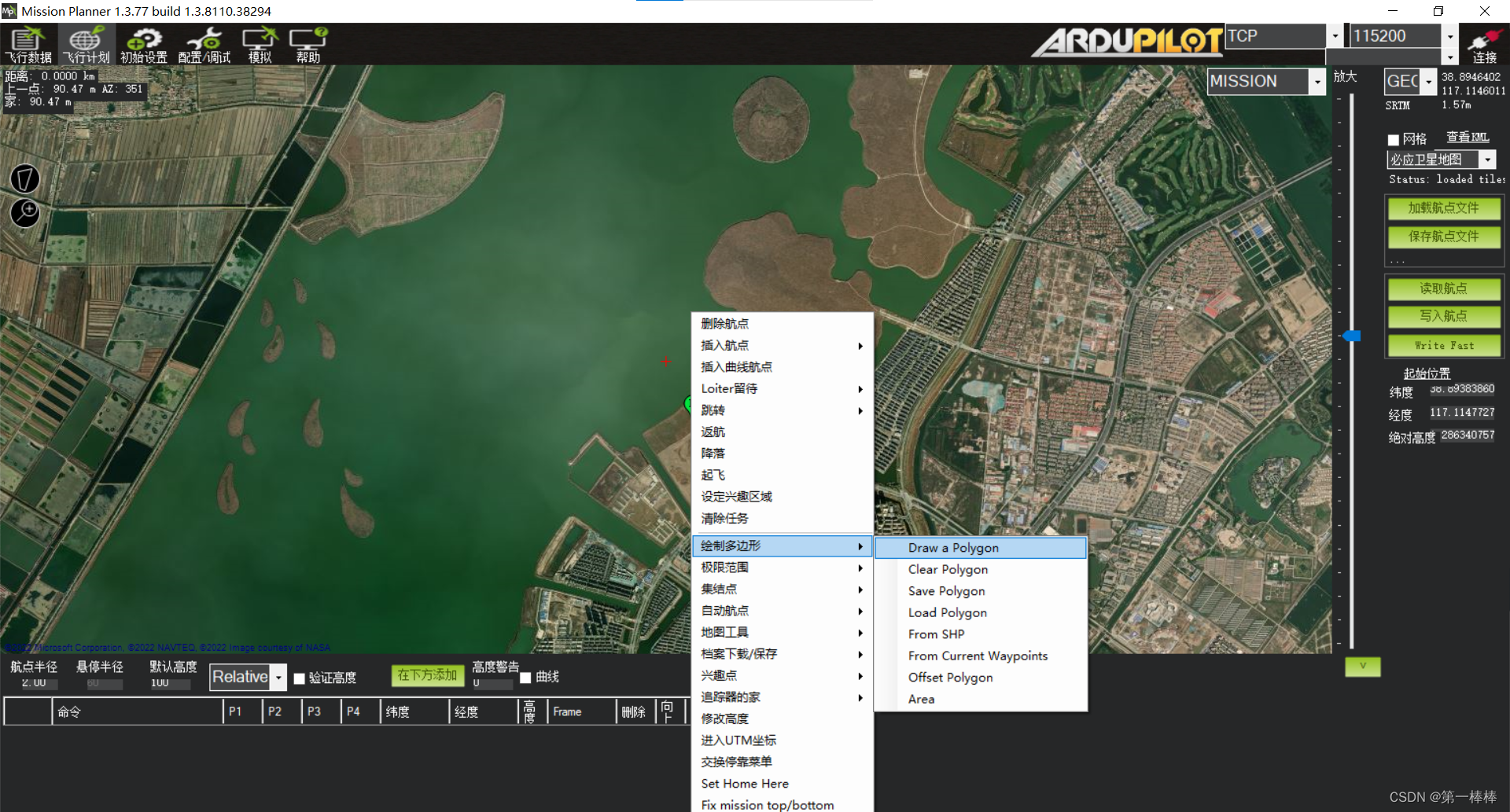
3.规划多边形区域。
1.点击左侧边界按钮。或
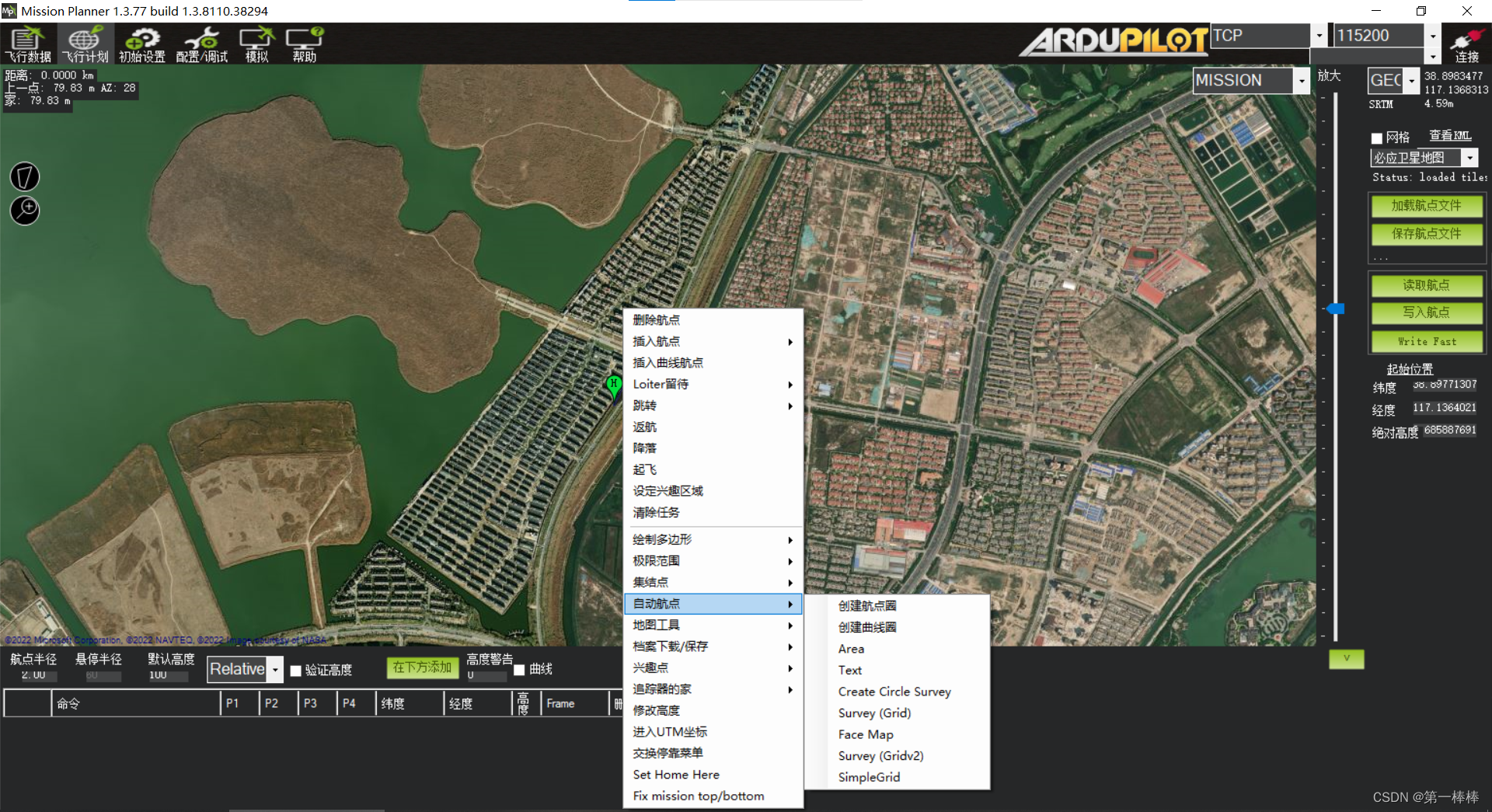
右键,点击绘制多边形,点击
Draw a Polygon
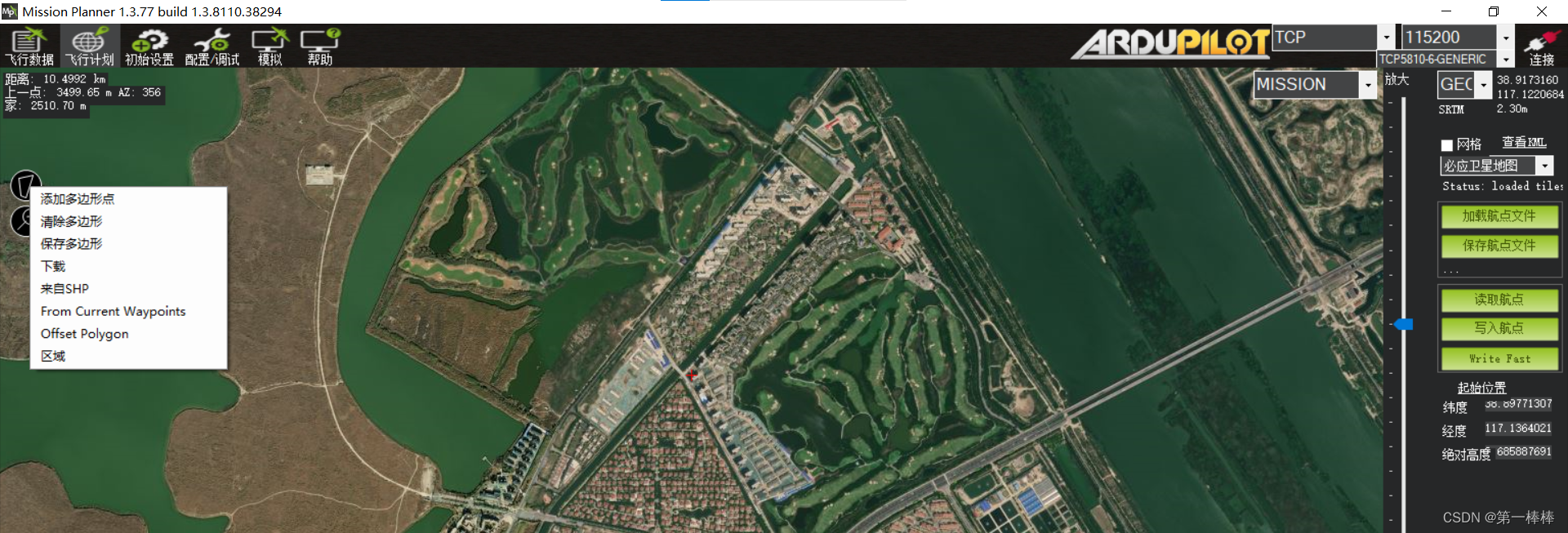
2.点击添加多边形点。 鼠标左键点出所需区域。

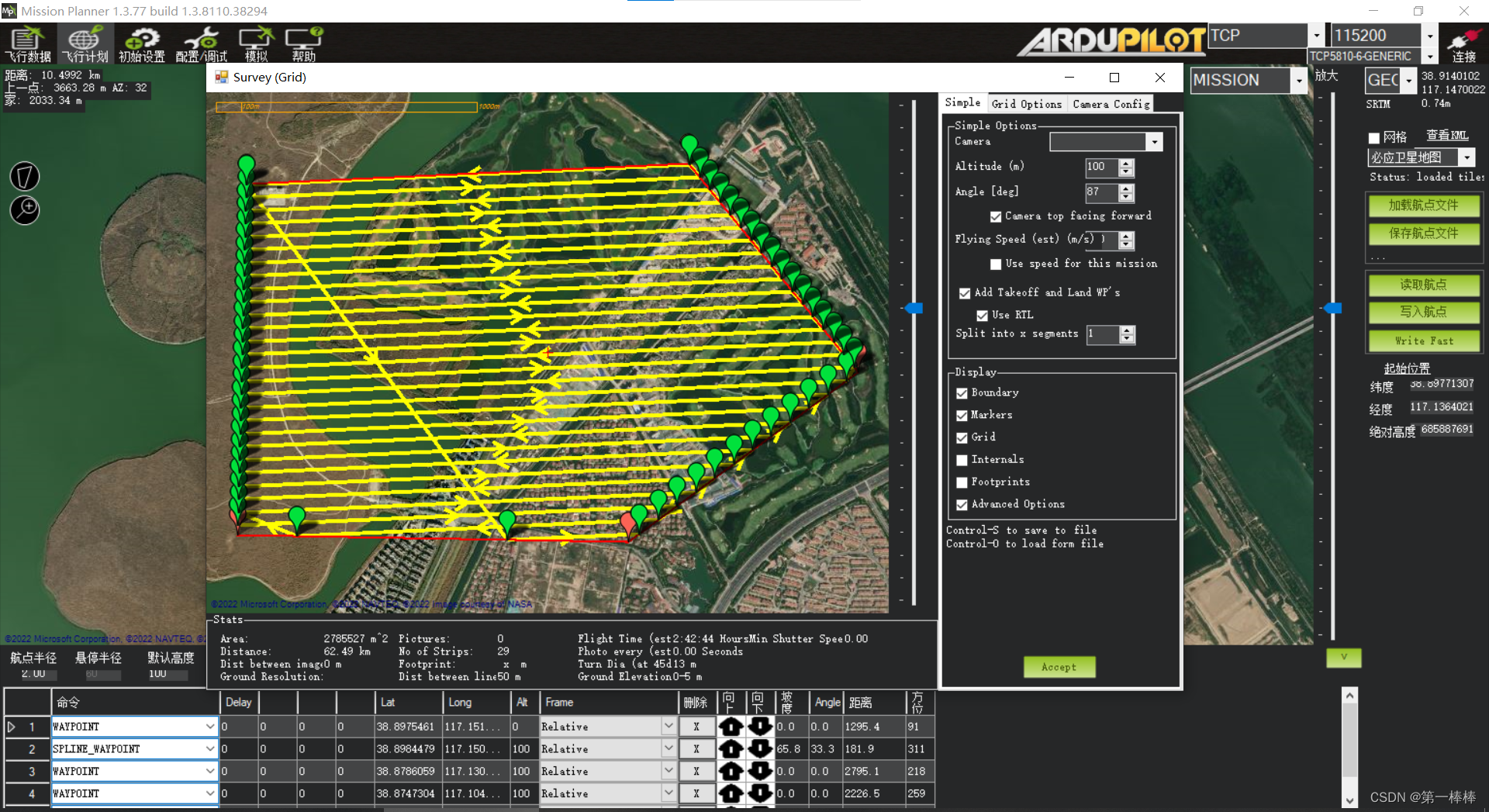
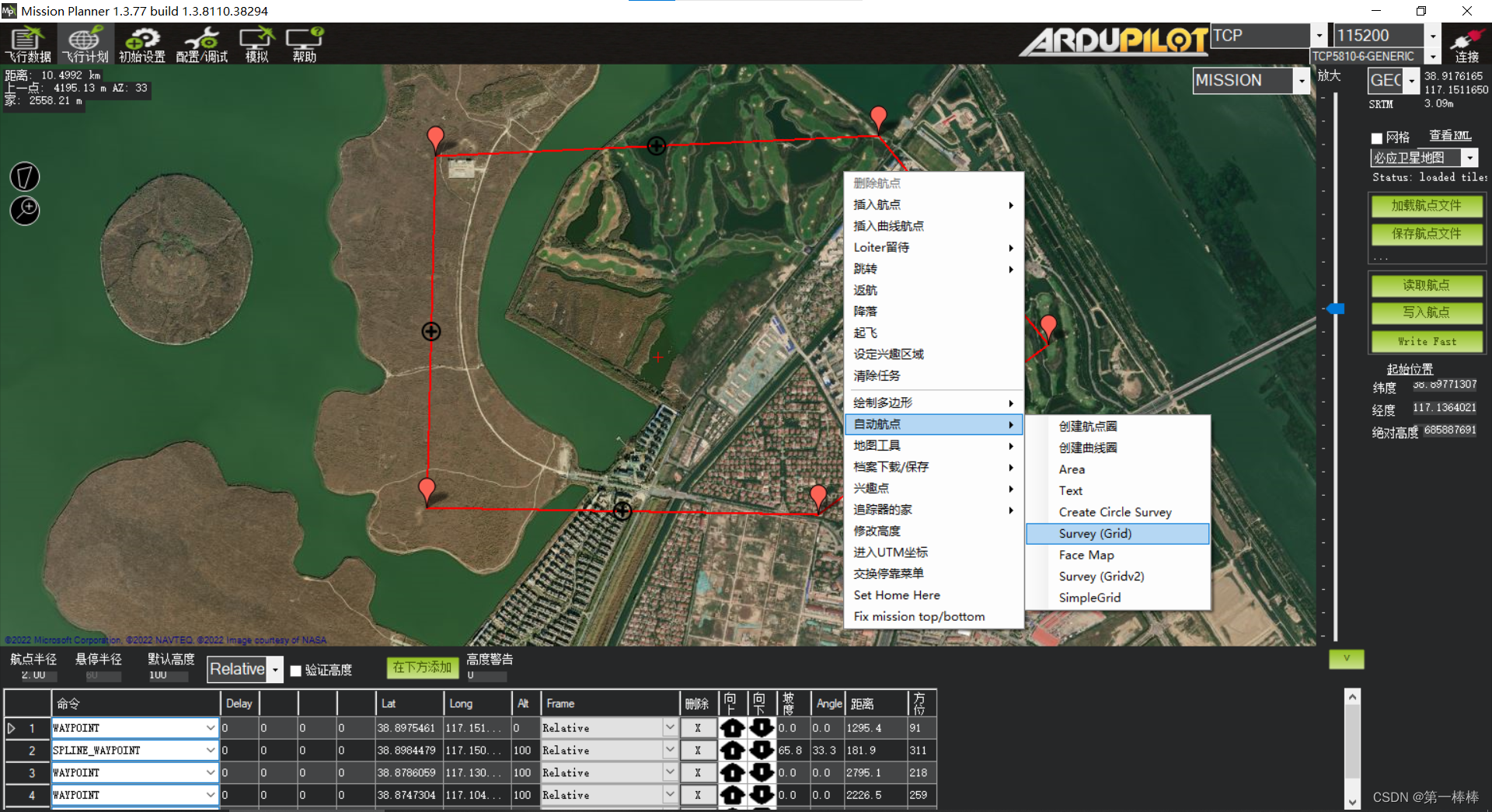
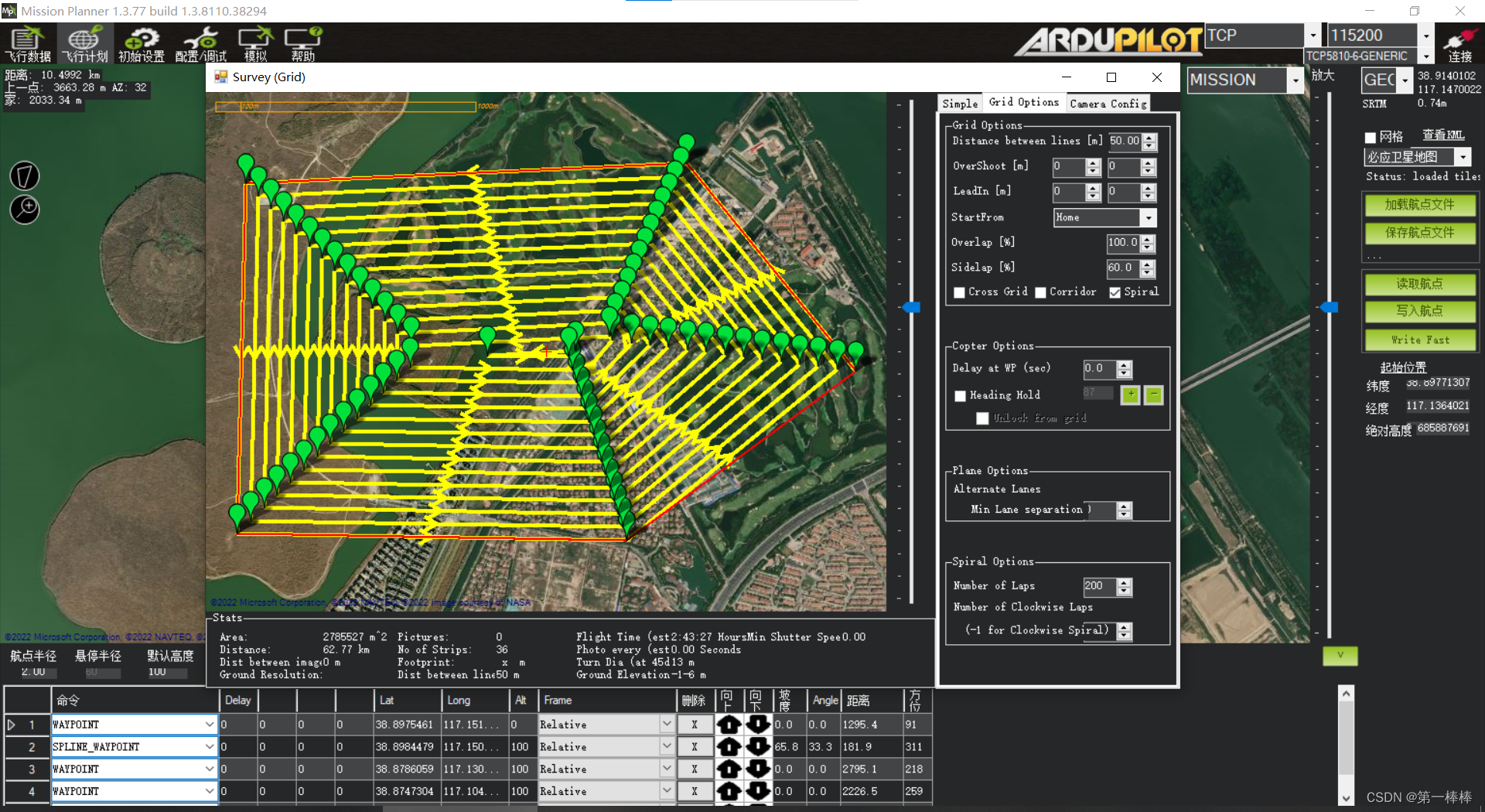
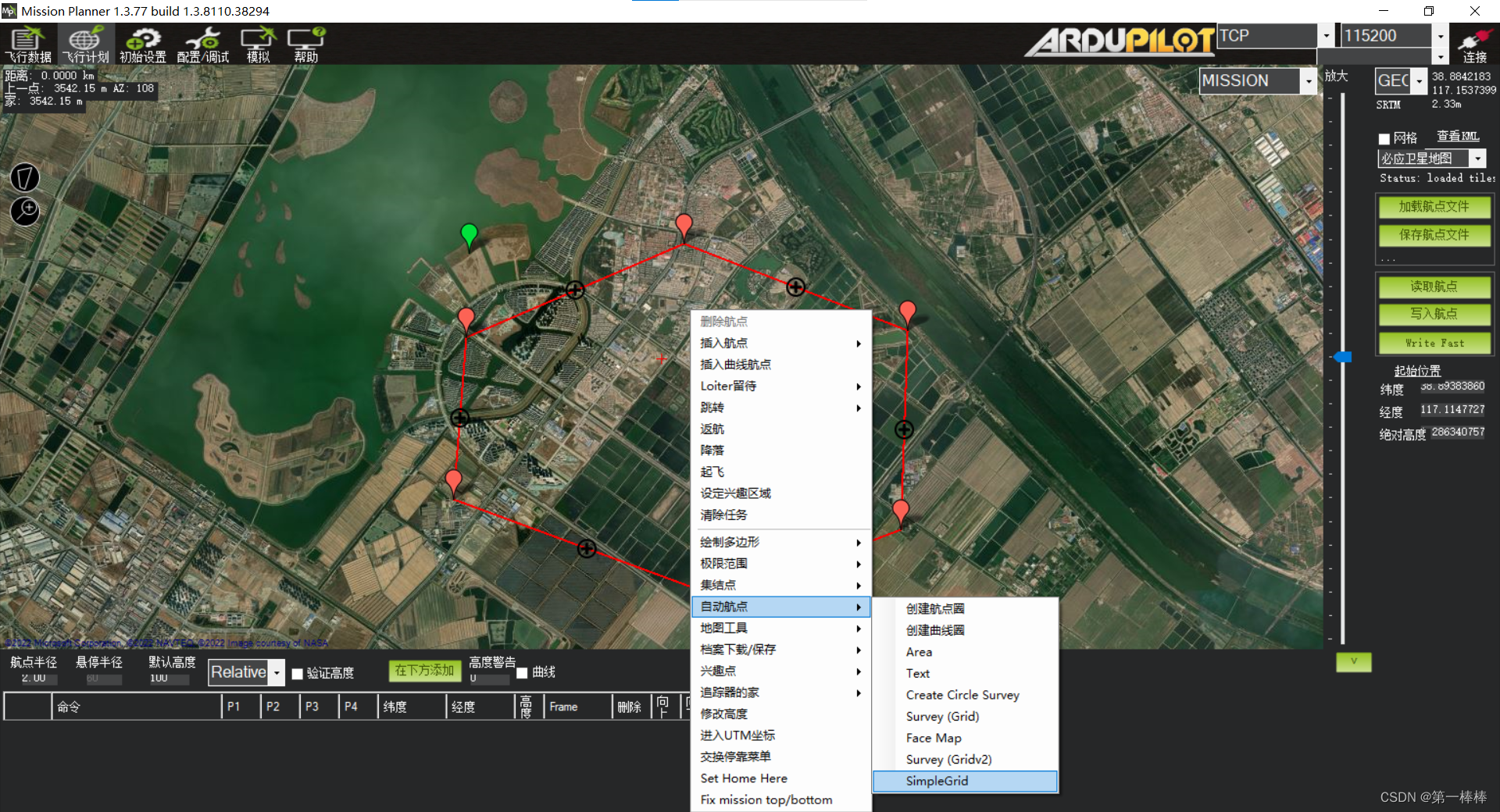
3.区域边框为红色。 鼠标右键点击自动航点。survey grid(测量网)
survey grid(测量网)
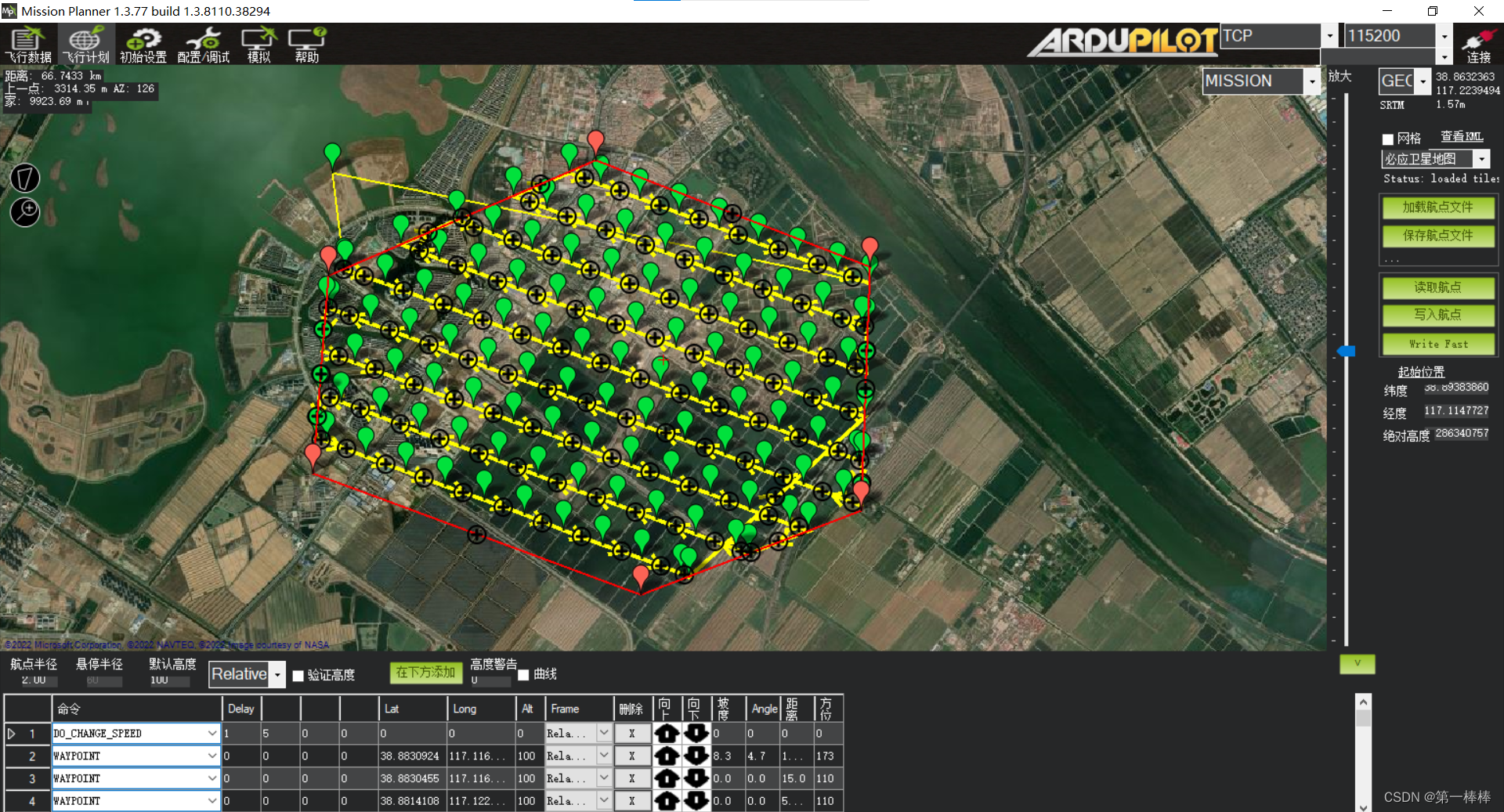
4.输入数据。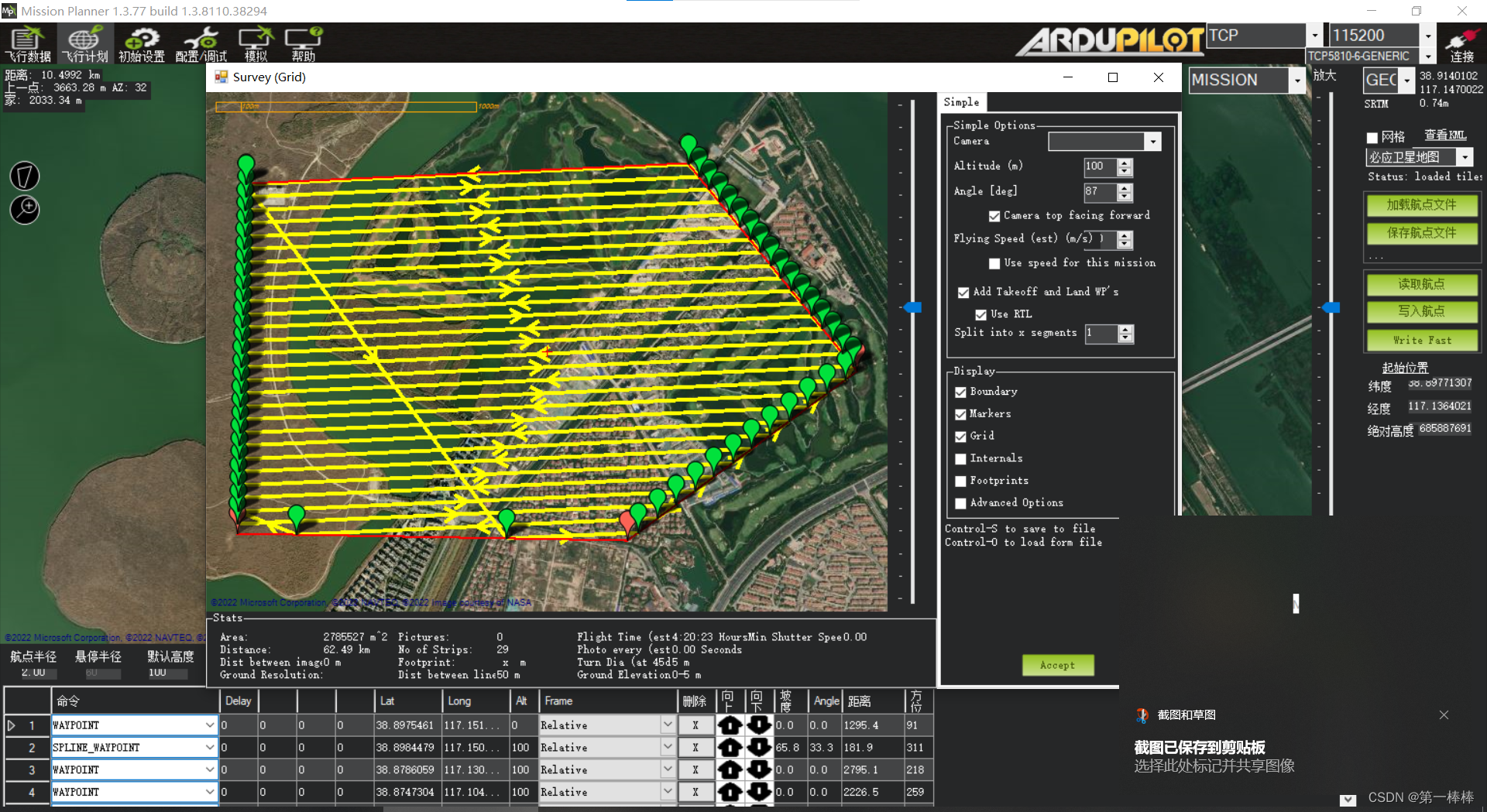
Simple普通菜单如下:
菜单Grid Options
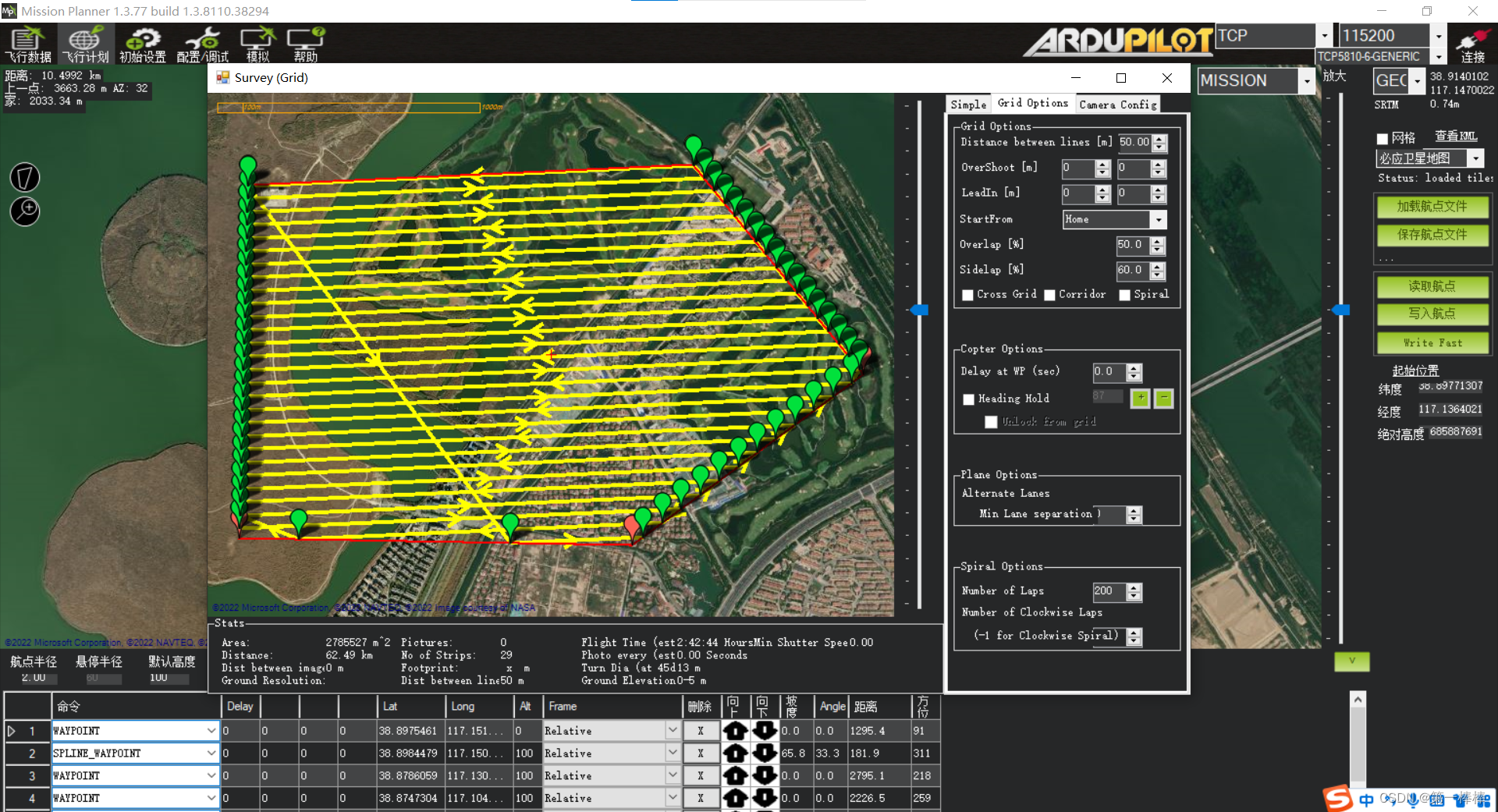
Distance between lines[m]:换行距离,默认50
StartFrom:设定任务起始位置
Home:航点从home点开始
BottomLeft:航点从底部左端开始
TopLeft:航点从顶部左端开始
BottomRight:航点从底部右端开始
TopRight:航点从顶部右端开始
Point:航点从home点开始
overlap:重叠%
sidelap:侧向重叠
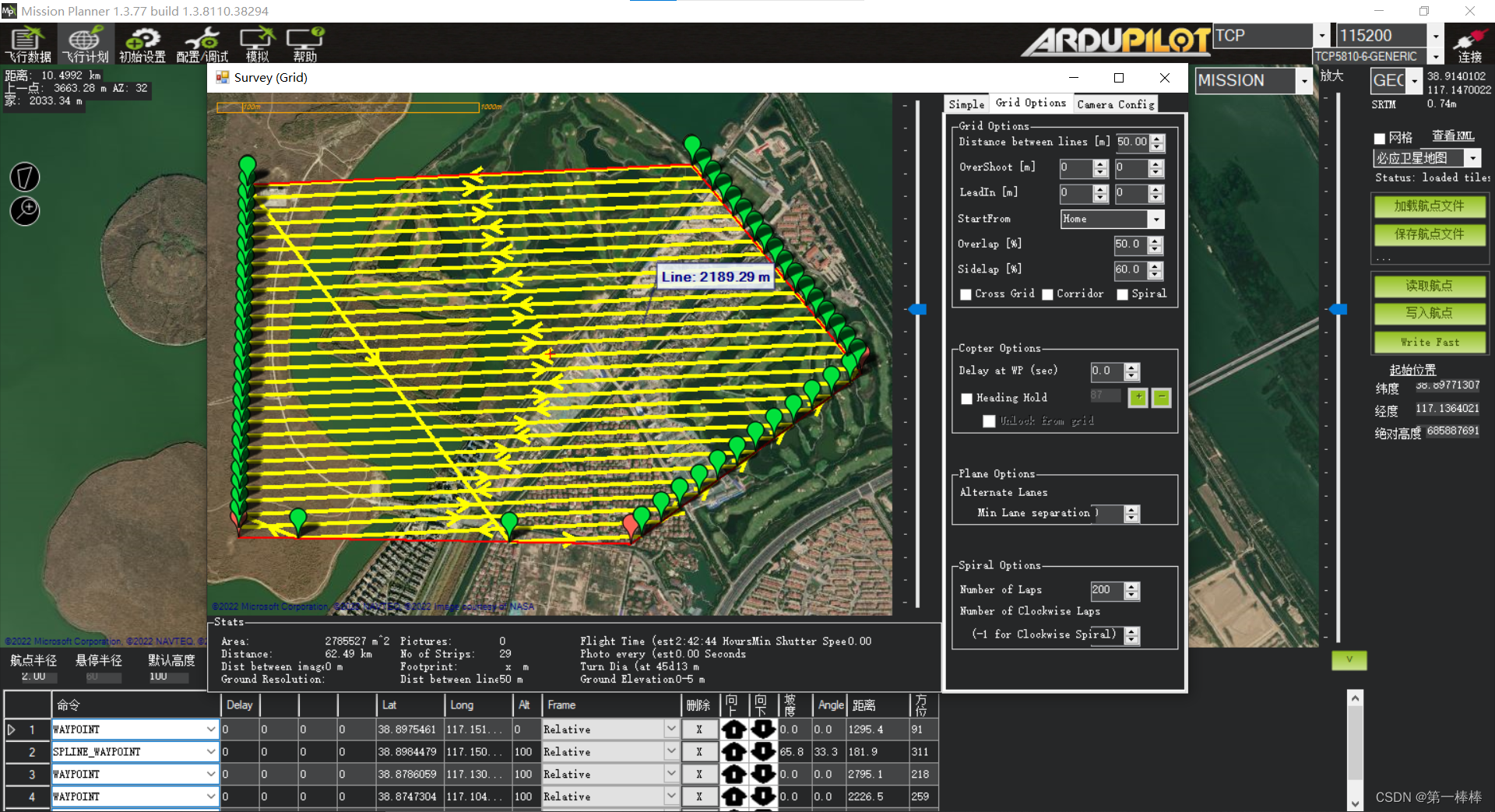
鼠标放在某一航线上方,可以显示其长度。
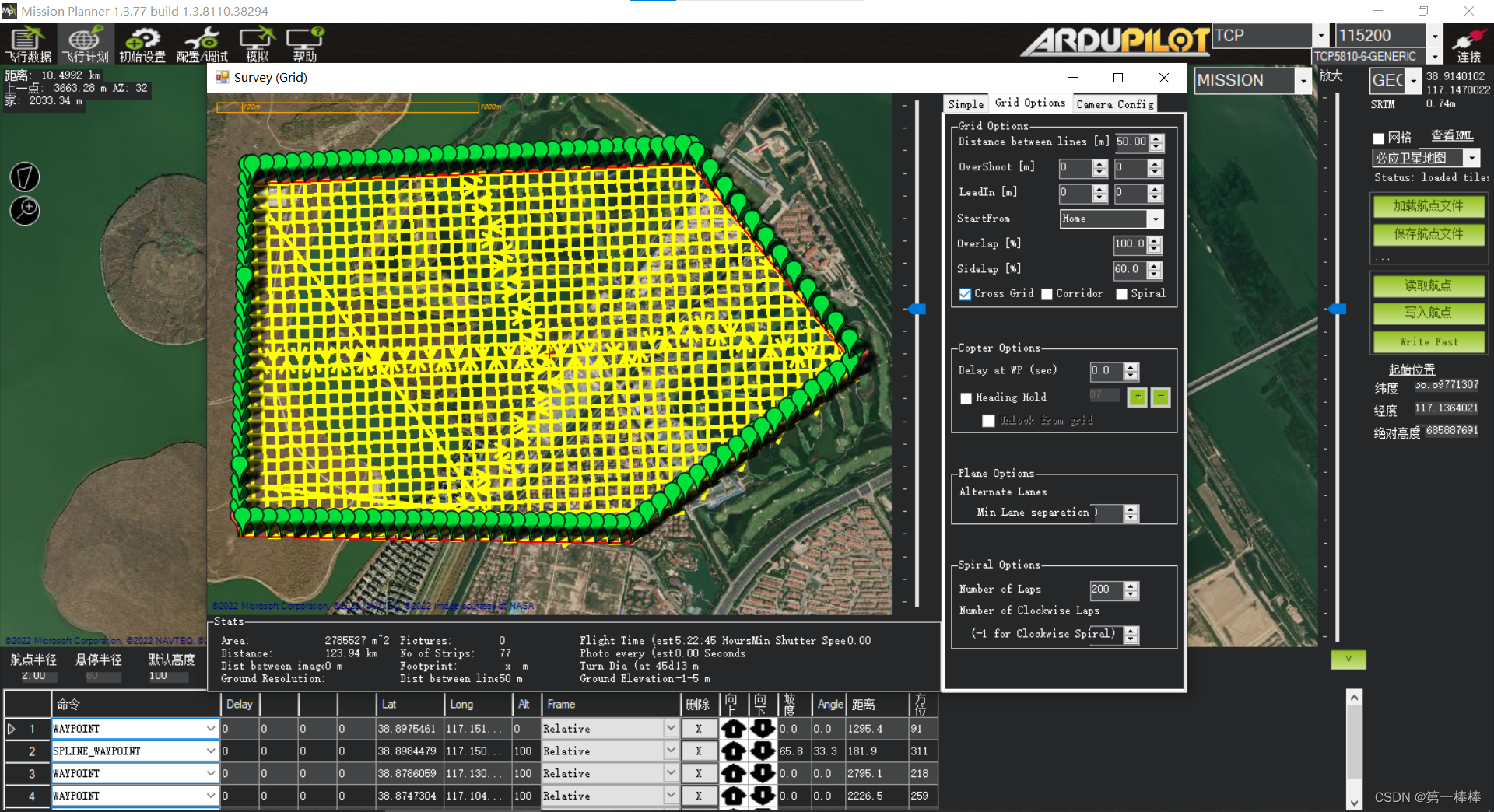
cross grid
纵向网格
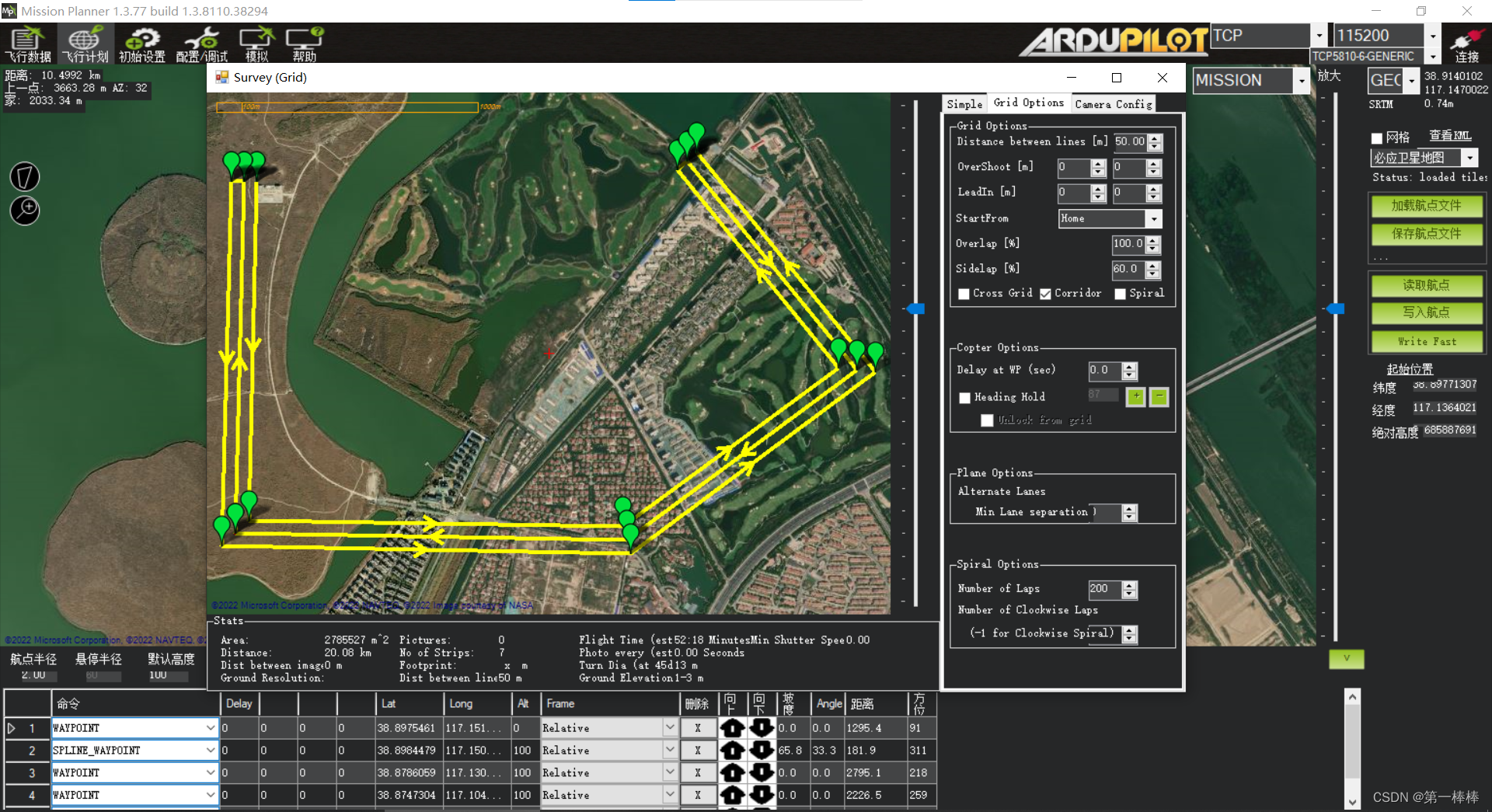
corridor 廊道航线
spiral
螺旋式航线
全部设置完,点击simple菜单,点击完成accept
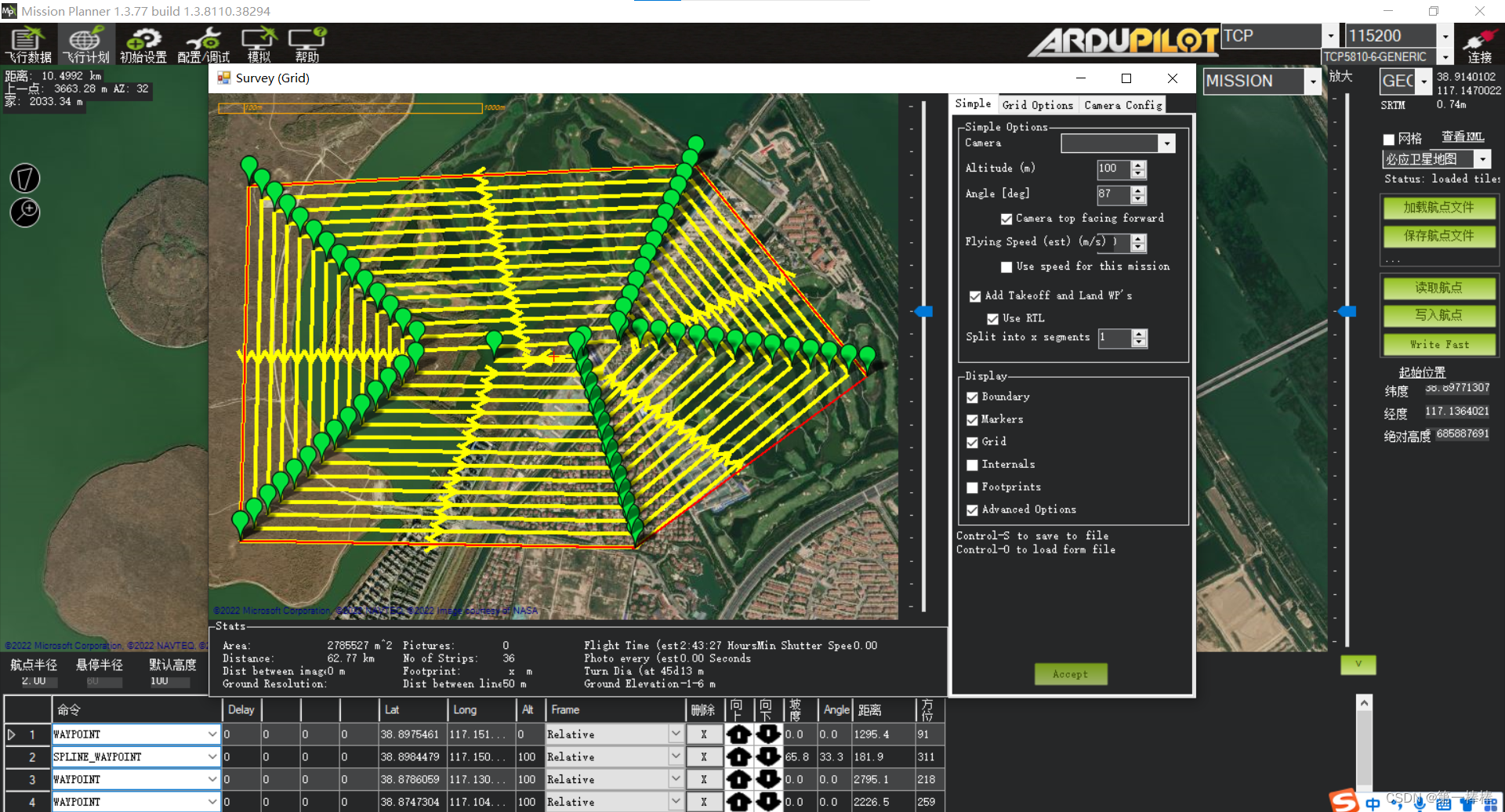
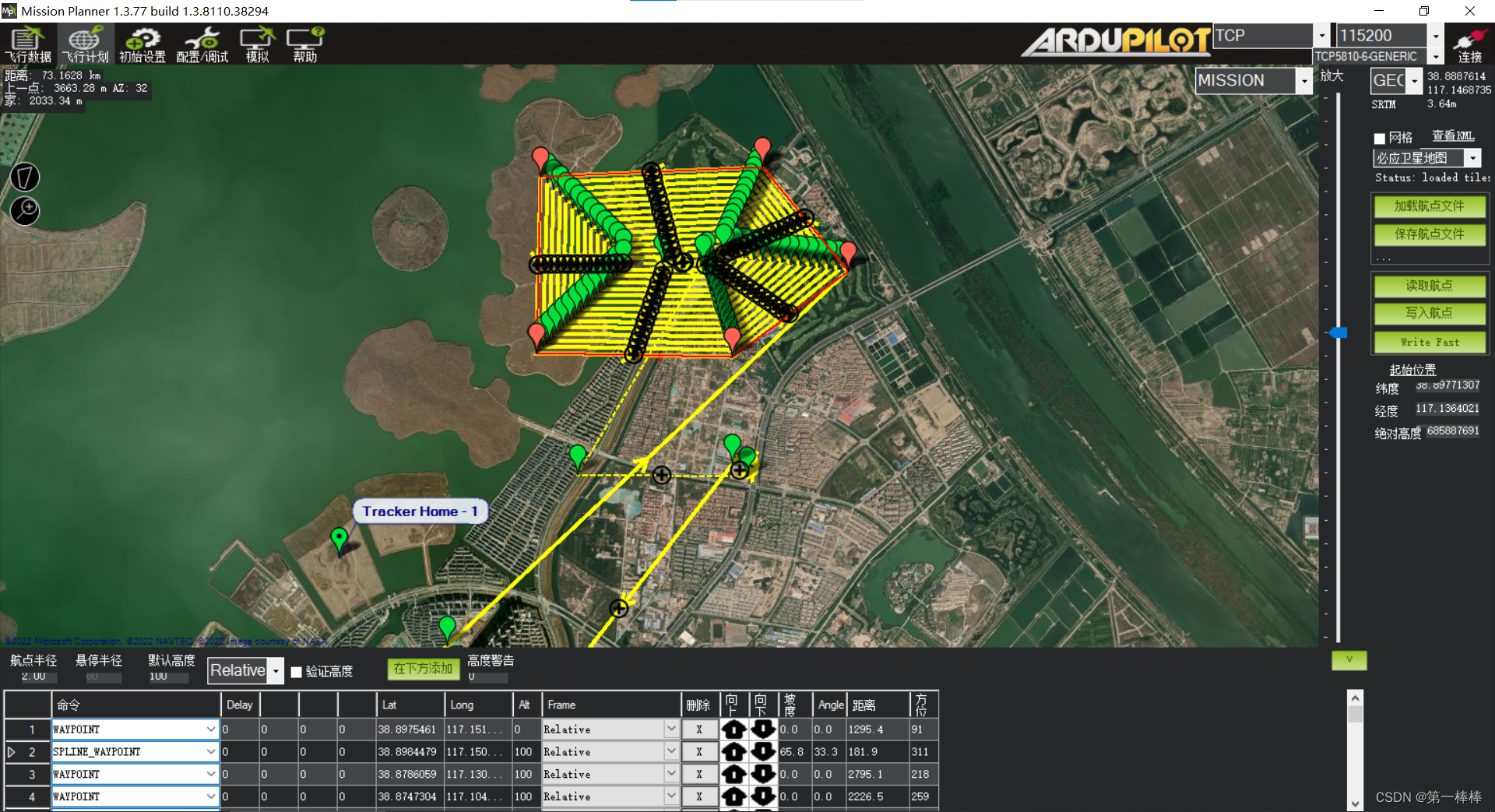
查看完整路径。
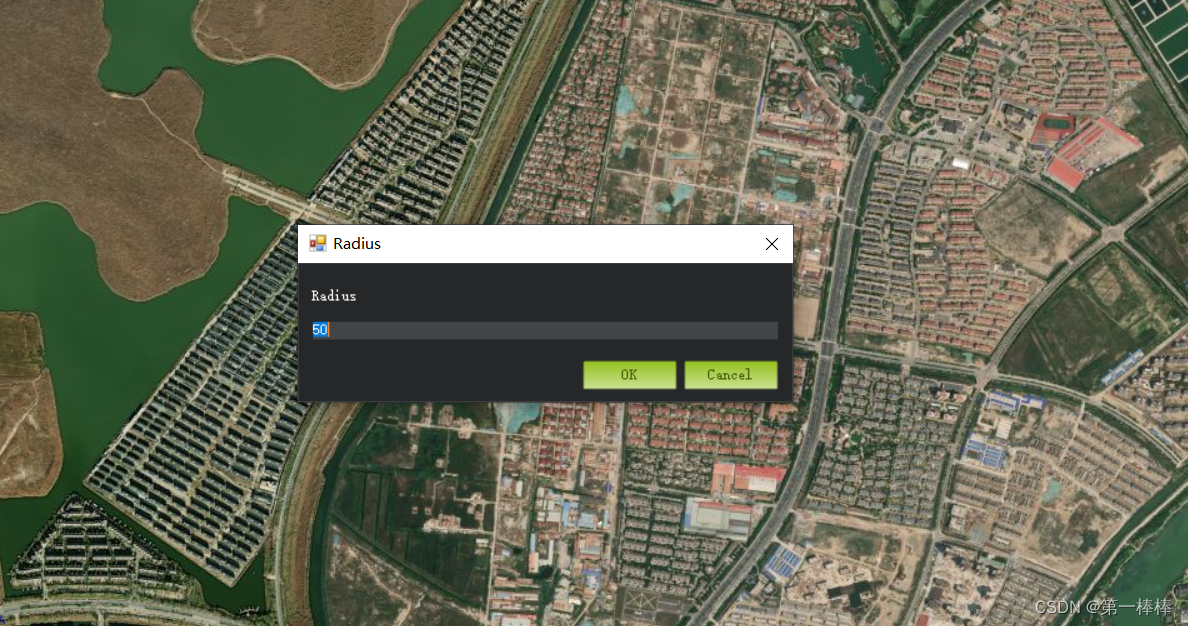
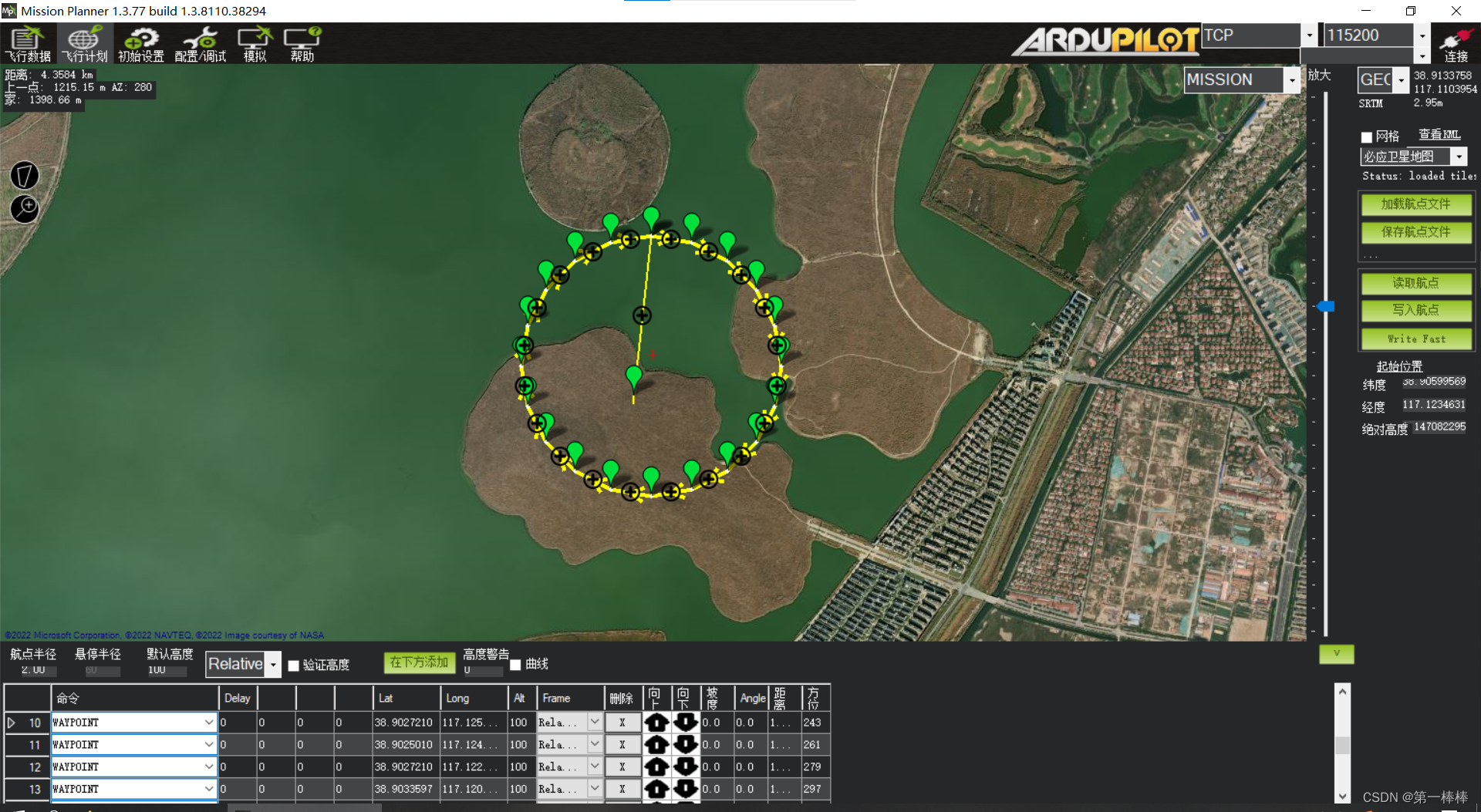
4.环形航线
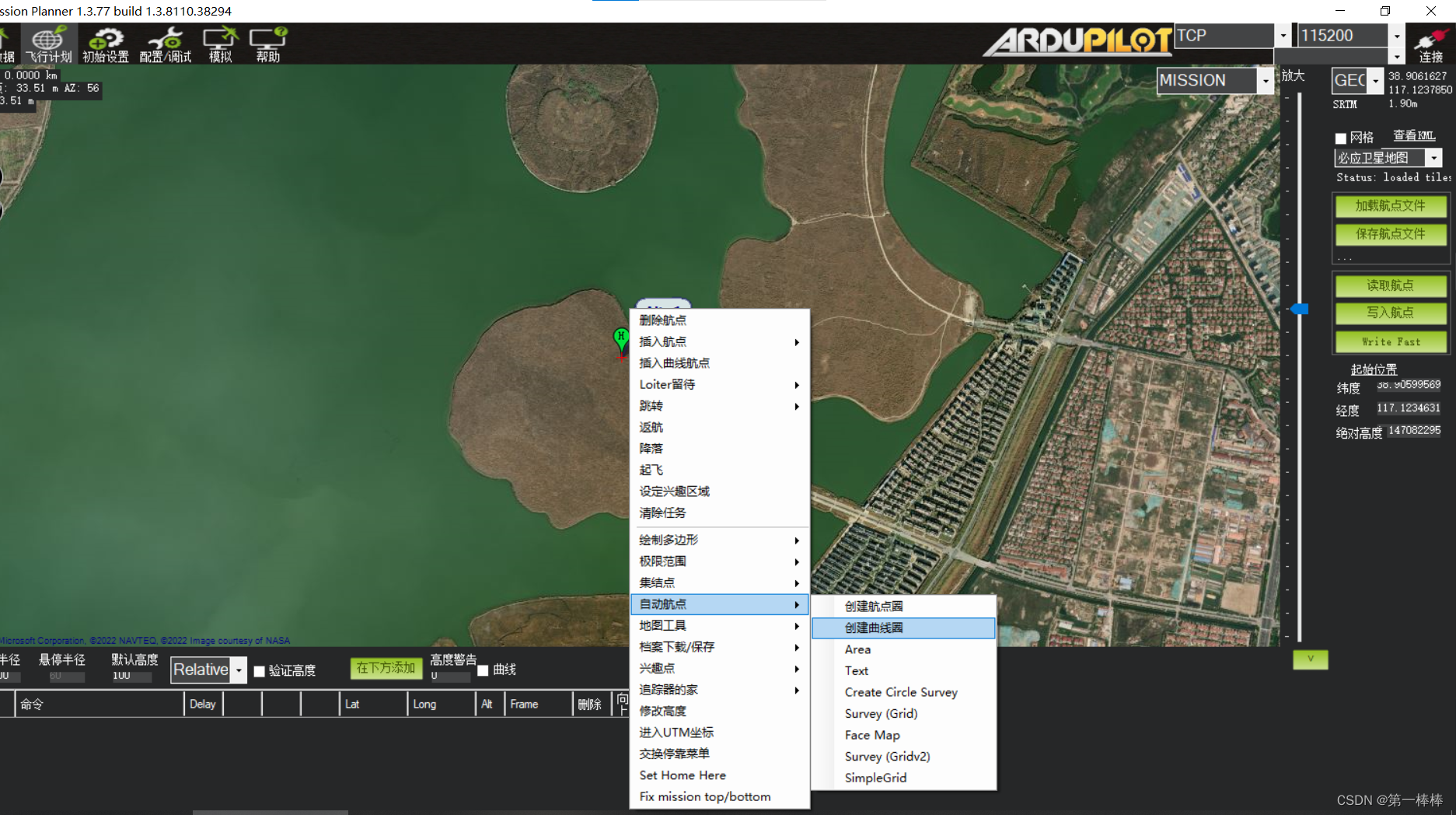
右键点击自动航点——创建航点圈
设置属性:
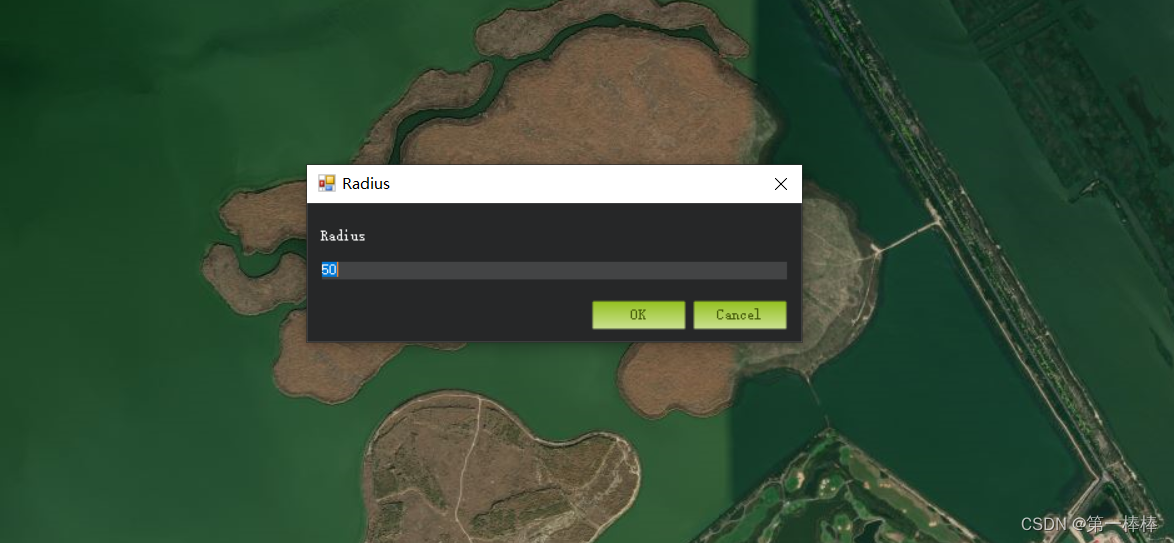
radius
设置半径
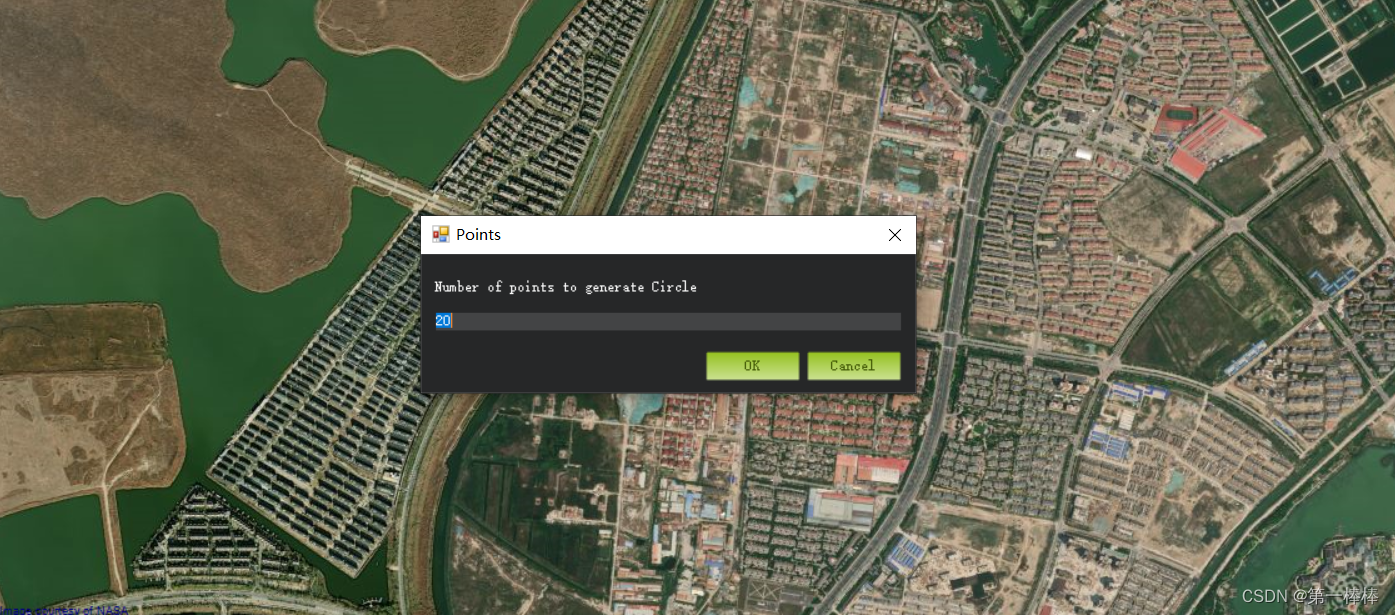
Number of points to generate Circle:
一圈的航点数
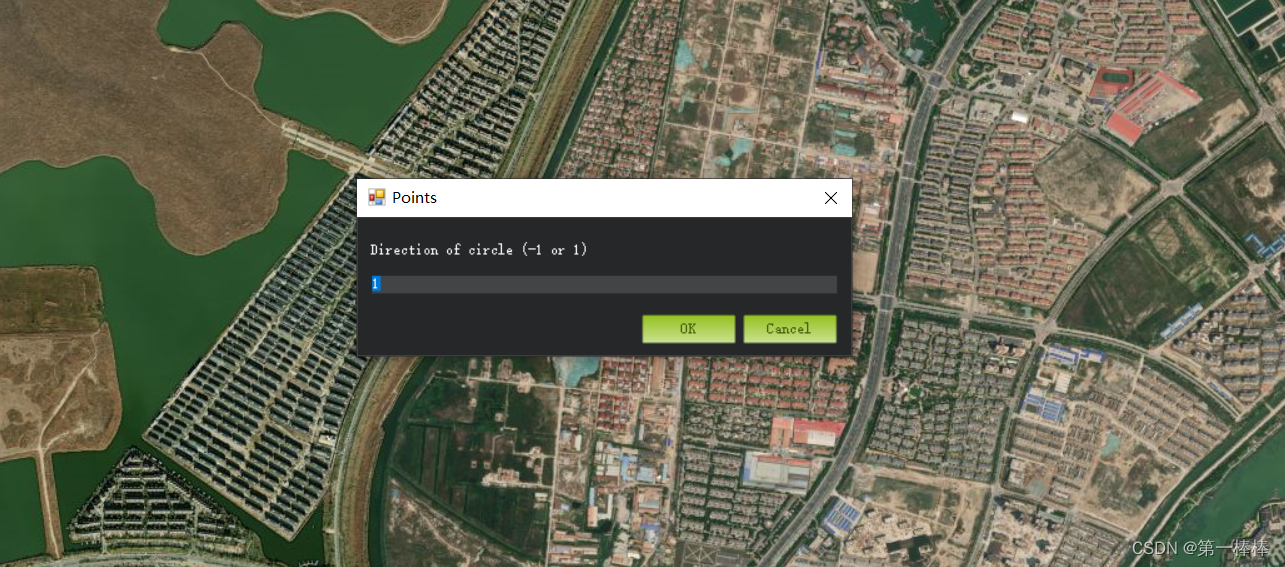
Direction of circle:
圈的方向,1顺时针,-1逆时针
Angle of first point(whole degress):
第一个航点的角度
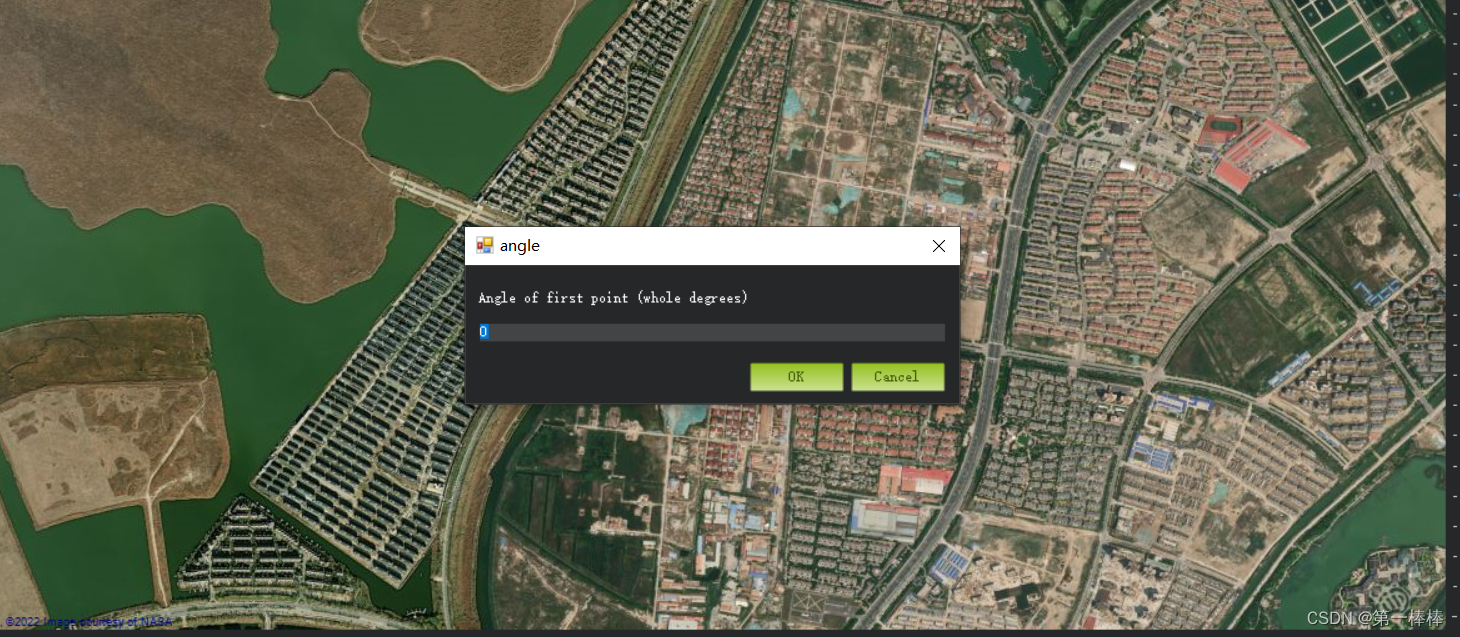
完成设置。
注意:
画完航线后如果需要拖动地图,用右键。如果用左键一点击,会出现新的航点,更改了原有路线。
5. 曲线航线
点击自动航点——创建曲线圈。
Radius:
设置航点圈的半径
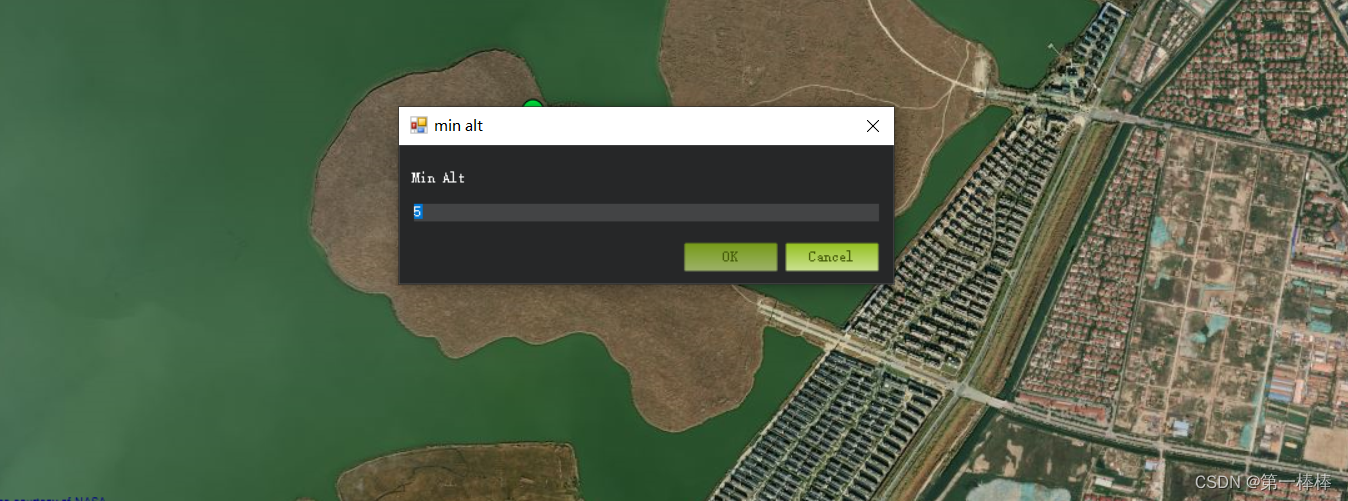
Min Alt:
航点的最低高度,从无人机锁定GPS的点开始算
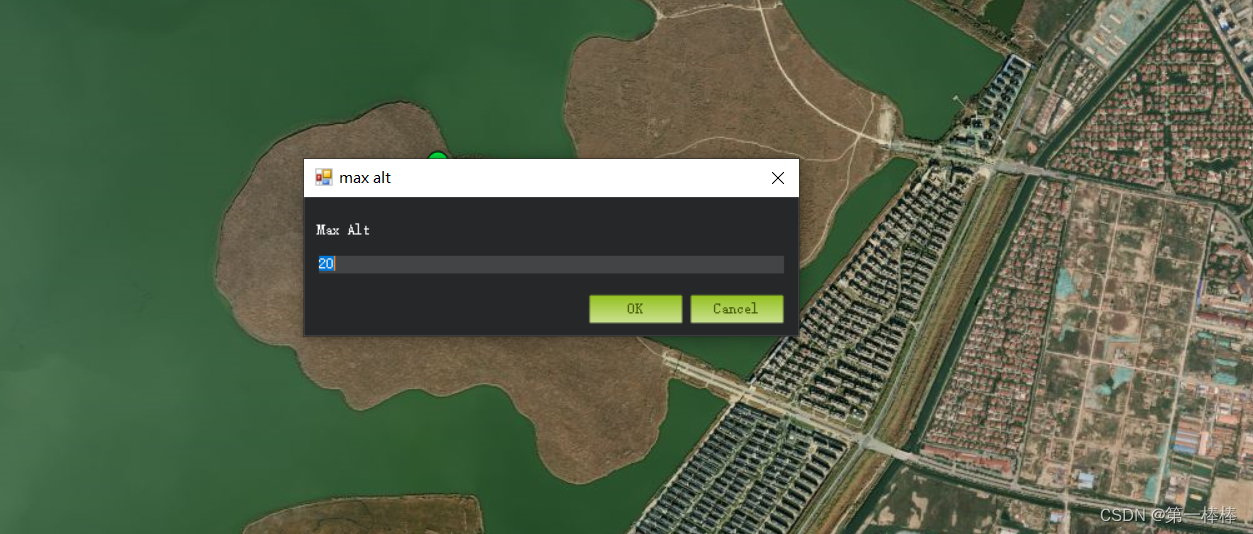
Max Alt:
航点的最高高度,从无人机锁定GPS的点开始算
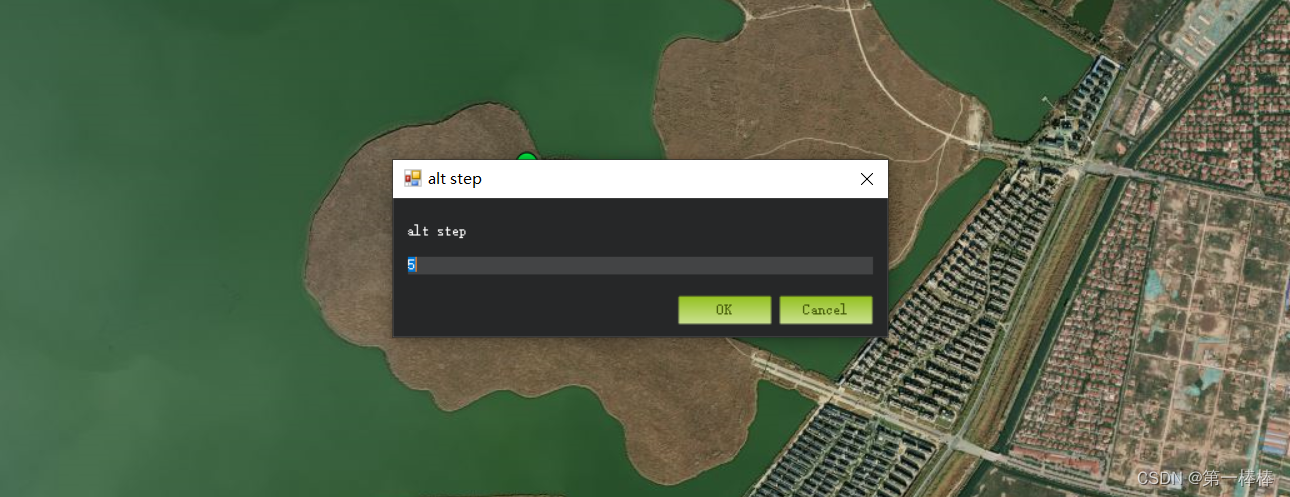
alt step:
高度步进值
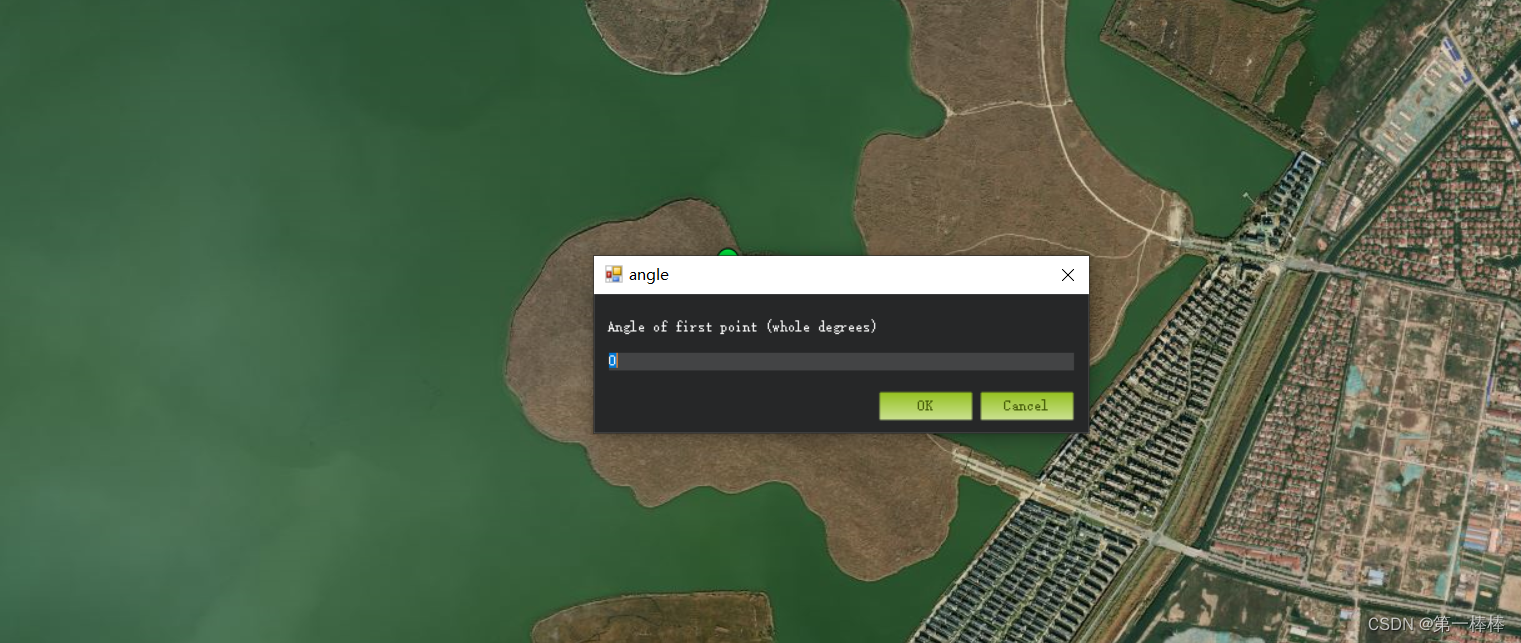
Angle of first point:
第一个航点的角度
完成设置。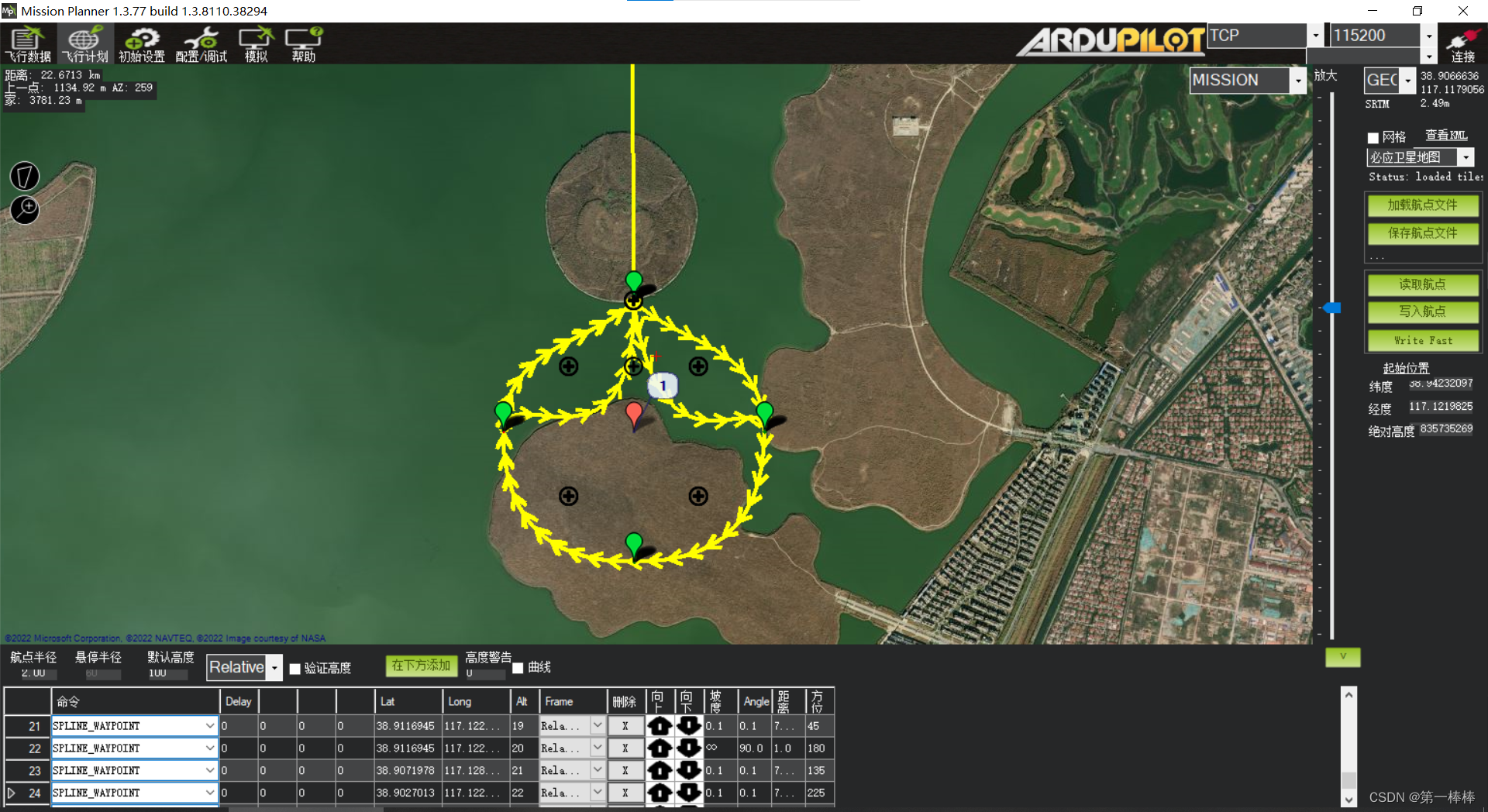
6.设置网格
点击右键,点击绘制多边形
draw a polygon
 设置属性
设置属性
Altitude:高度
Angle[deg]:角度
Line spacing[m]:每行的距离
Spacing inline[m]:每列的距离
OverShoot[m]:左边超过几米
OverShoot[m]:右边超过几米
Speed:速度
StartFrom:设定任务起始位置
Home:航点从home点开始
BottomLeft:航点从底部左端开始
TopLeft:航点从顶部左端开始
BottomRight:航点从底部右端开始
TopRight:航点从顶部右端开始
Point:航点从home点开始
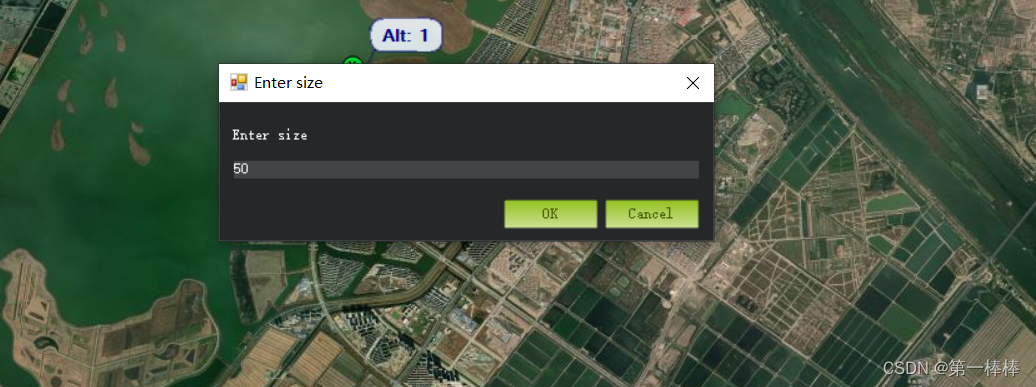
7.特殊航线(文本)
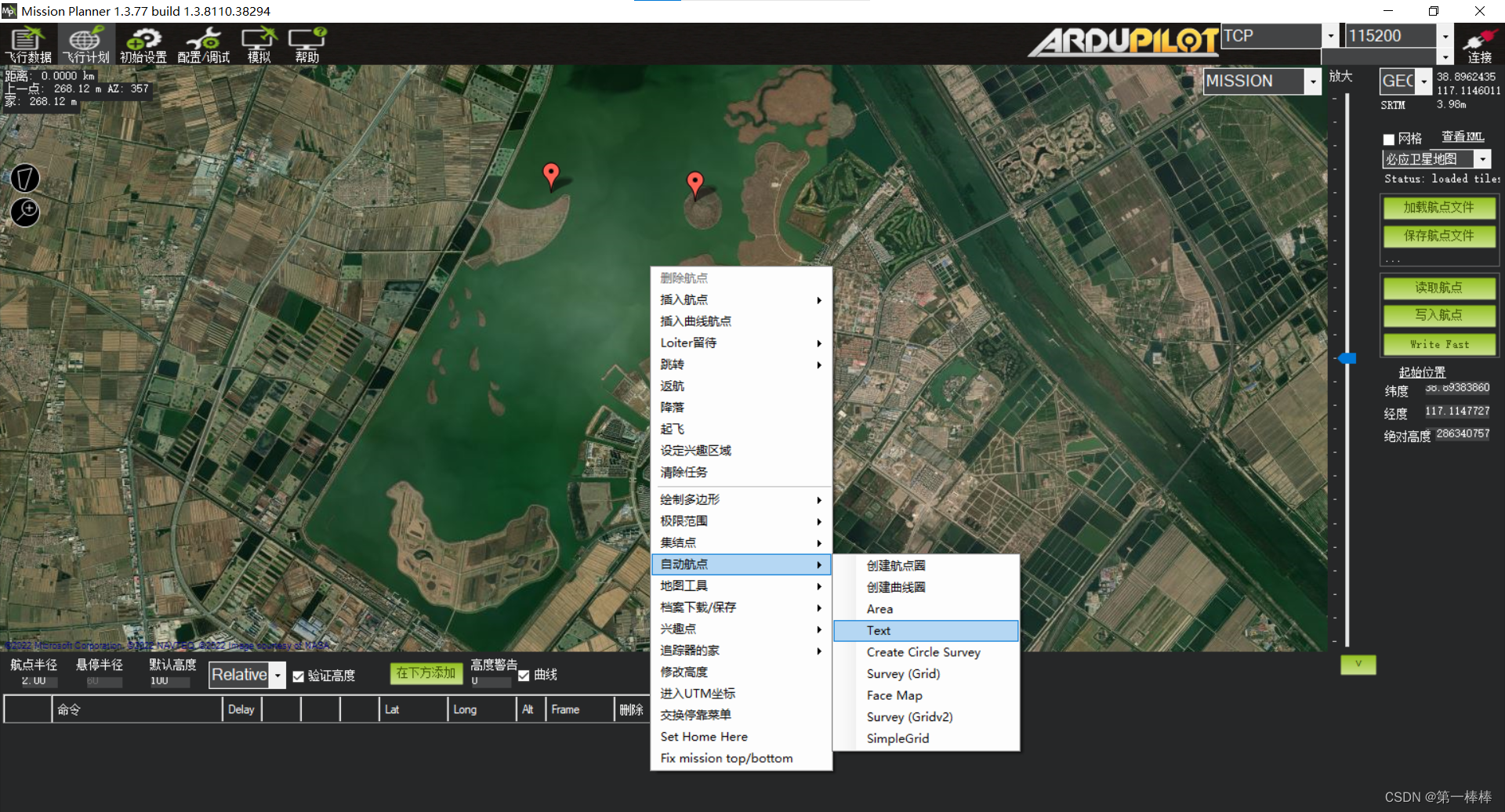
Enter String(require 1CamBam_Stick_3 font)
填写字符,可以是中文
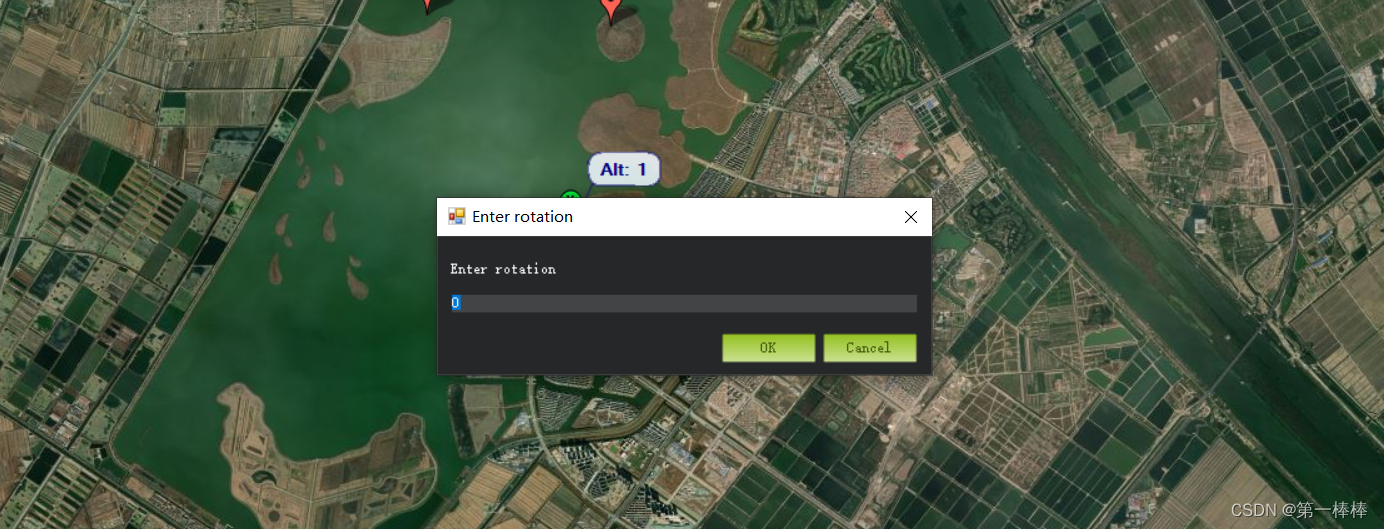
设置大小
设置方向
中文示例
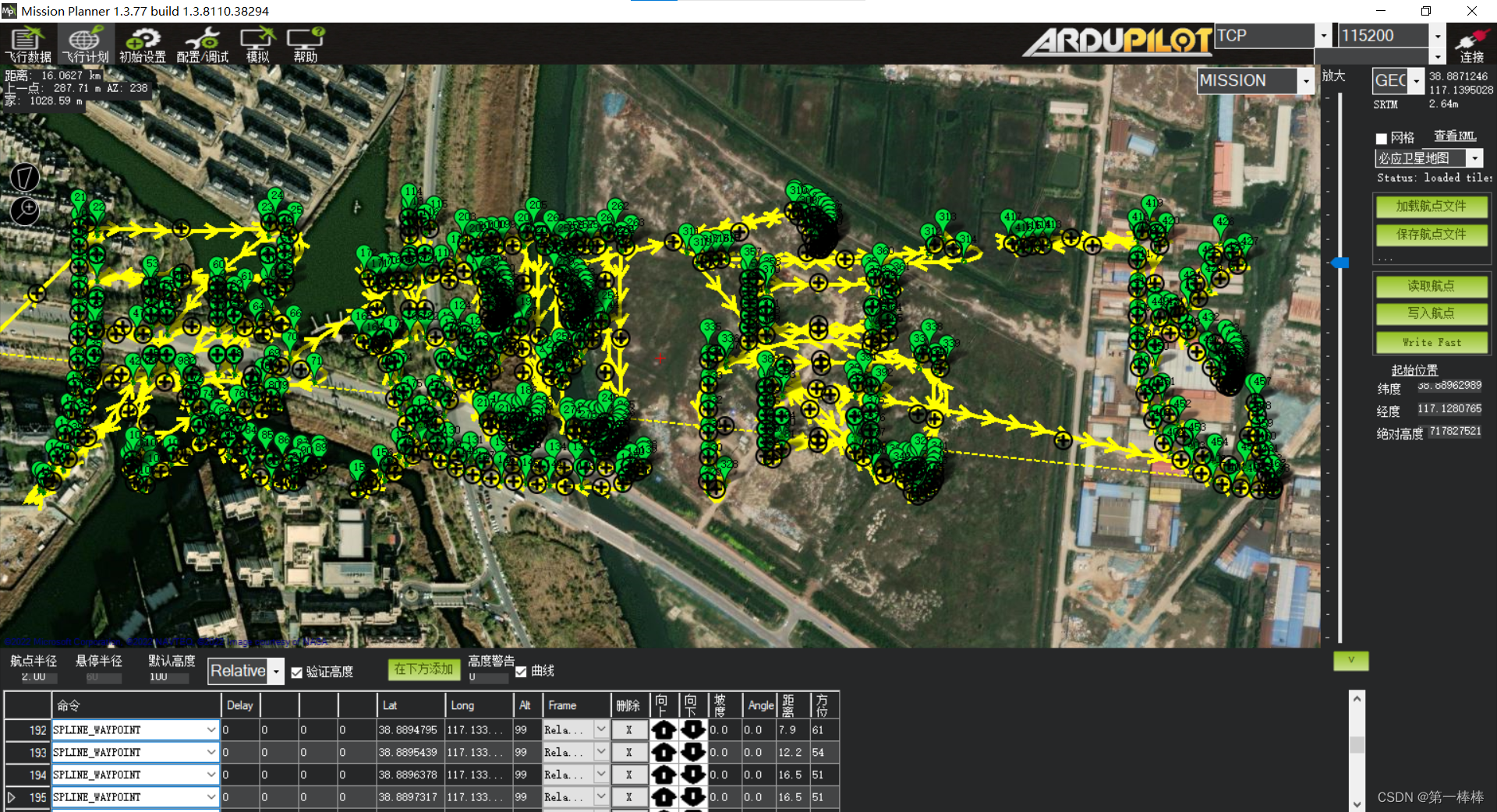
英文示例

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)