提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、树莓派是什么?
- 二、使用步骤
- 1.主要Pin脚的编号
- 2.使用硬件
- 3.连接树莓派Pin位
- 4.使用代码
- 实验总结
前言
随着物联网的不断发展,智能家居越来越普及,本文就介绍了raspberry(树莓派)的简单使用,以及一个简单的实验。
一、Raspberry是什么?
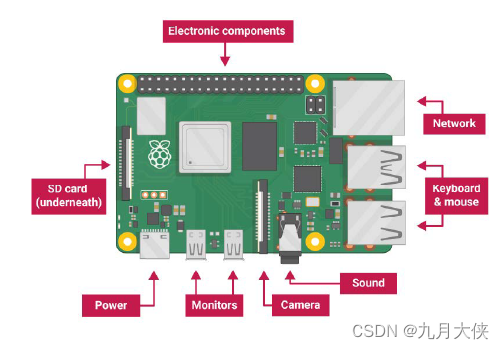
树莓派(英语:Raspberry Pi)英国树莓派基金会开发的微型单板电脑,目的是以低价硬体及自由软体促进学校的基本电脑科学教育。
树莓派系列电脑每一代均使用博通(Broadcom)出产的ARM架构处理器,如今生产的机型(树莓派4B)记忆体在2GB和8GB之间,主要TF卡作为系统储存媒体(初代使用SD卡),配备USB介面和HDMI的视讯输出(支援声音输出),内建Ethernet/WLAN/Bluetooth网路链结的方式(依据型号决定),并且可使用多种操作系统。产品线型号分为A型、B型、Zero型和ComputeModule计算卡。
Raspberry Pi OS是官方推出的作业系统,适用于所有型号的树莓派,树莓派基金会网站也提供了Ubuntu MATE、Ubuntu Core、Ubuntu Server、OSMC等第三方系统供大众下载。
二、使用步骤
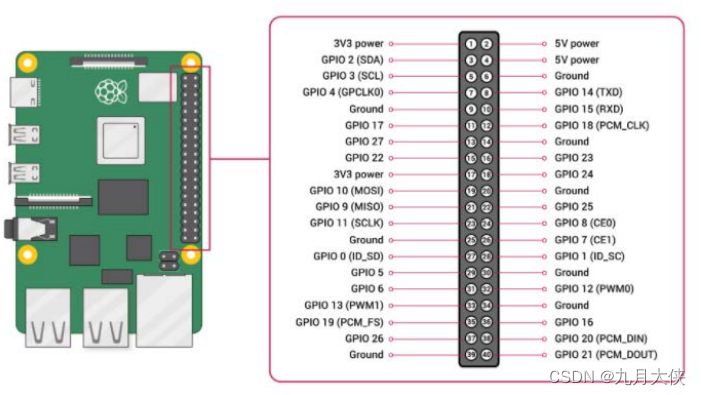
1.主要Pin脚的编号
:
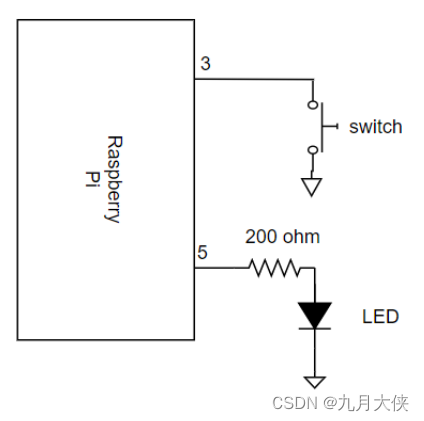
2.使用硬件
硬件如下(图示):
- 按钮 switch
- LED灯
- 电阻 200 ohm



3.连接树莓派Pin位
4.使用代码
按钮按下去,当LED灯就会开始闪耀一秒开一秒关,否则LED灯就保持亮。
import RPi.GPIO as GPIO # RPi.GPIO can be referred as GPIO from now
import time
ledPin = 5
switchPin = 3
GPIO.setmode(GPIO.BOARD)
GPIO.setwarnings(False)
GPIO.setup(ledPin, GPIO.OUT)
GPIO.output(ledPin, GPIO.LOW) #turn off LED
#GPIO.setup(switchPin, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(switchPin, GPIO.IN) #pin3 as input has internal pull-up
while True:
if GPIO.input(switchPin): #read button state
print("LED on")
GPIO.output(ledPin, GPIO.HIGH)
time.sleep(1)
print("LED off")
GPIO.output(ledPin, GPIO.LOW)
time.sleep(1)
else:
GPIO.output(ledPin, GPIO.HIGH)
GPIO.cleanup()
总结
这给实验简单的使用按钮来控制LED的开关,如果延申开来,可以控制风扇,空调等其它的家电。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)