一、前言
从Prometheus的V1到V2,无人机的状态显示是在终端中,在一堆字符中寻找想要关注的信息,确实硬核;而今,随着社会与科技的发展,Prometheus也开始有了自己的地面站了;本片就是记录一下,在体验Prometheus的地面站的步骤;
二、官网说明
先贴一下官网的指导说明,想体验的朋友也可以尽量看官方说明:
https://wiki.amovlab.com/public/prometheus-wiki/
二、节点启动
1、# 启动仿真
roslaunch prometheus_gazebo sitl_outdoor_1uav.launch
2、# 启动控制节点
roslaunch prometheus_uav_control uav_control_main_outdoor.launch
3、#启动通信节点
roslaunch prometheus_communication_bridge bridge.launch
三、地面站操作
1、下载地面站与打开地面站
下载地址(来着官网复制的)https://dl.amovlab.com:30443/public/%E8%BD%AF%E4%BB%B6%E4%B8%8B%E8%BD%BD/Prometheus%E5%9C%B0%E9%9D%A2%E7%AB%99/

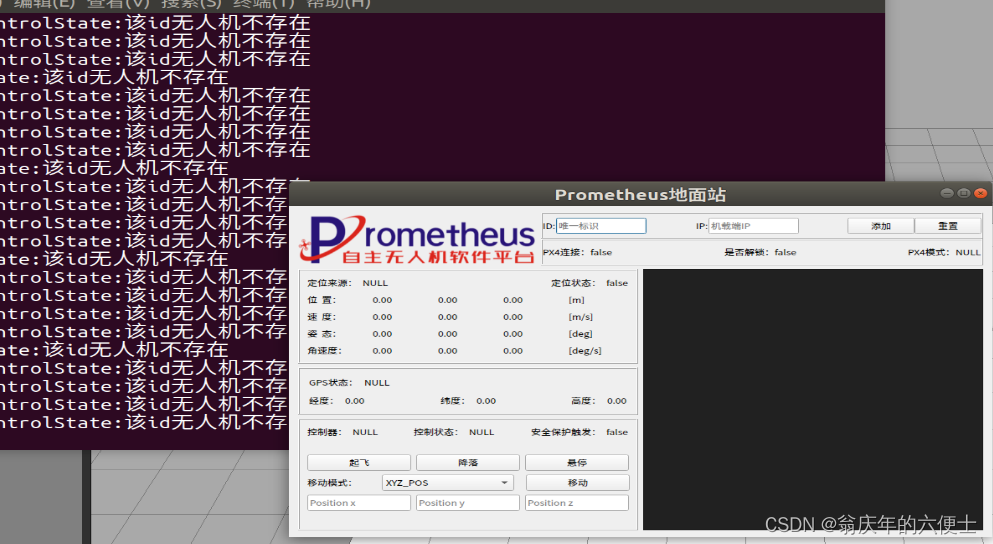
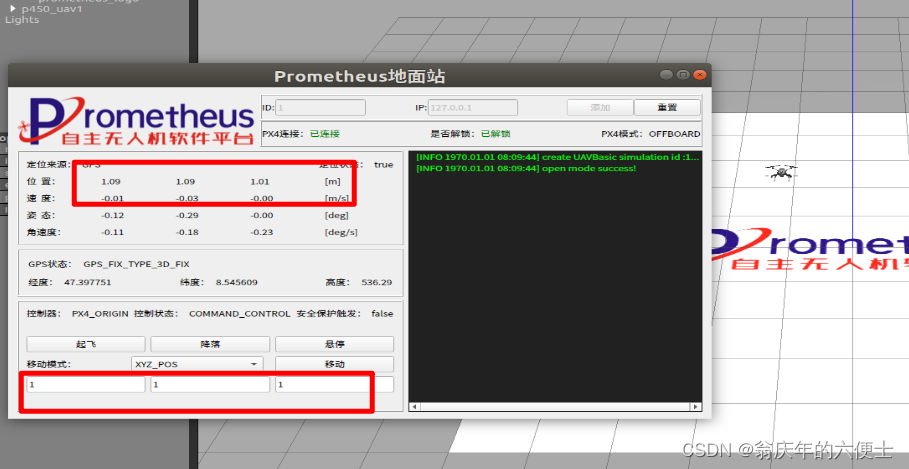
打开后的界面,此时由于没有连接,通信节点会持续打印警告信息;
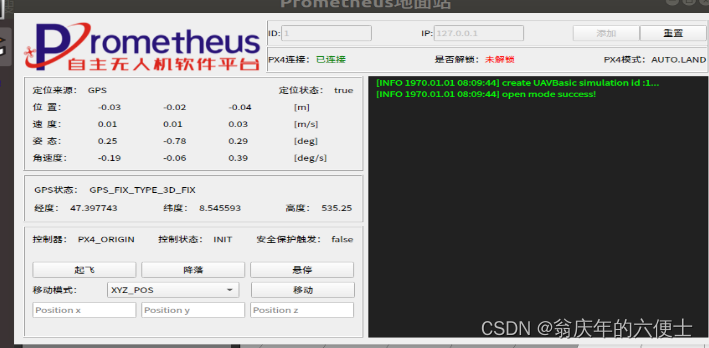
2、输入ID号码和ip地址
这里 输入的id号码是1,ip地址是127.0.0.1,然后点击添加;这个显示地面站和px4已经连上了;
3、使用遥控器解锁无人机
- 先使用遥控器解锁飞机;
- 将飞机的控制模式使用遥控器切换到COMMAND_CONTROL 模式;
- 点击地面站上的起飞;
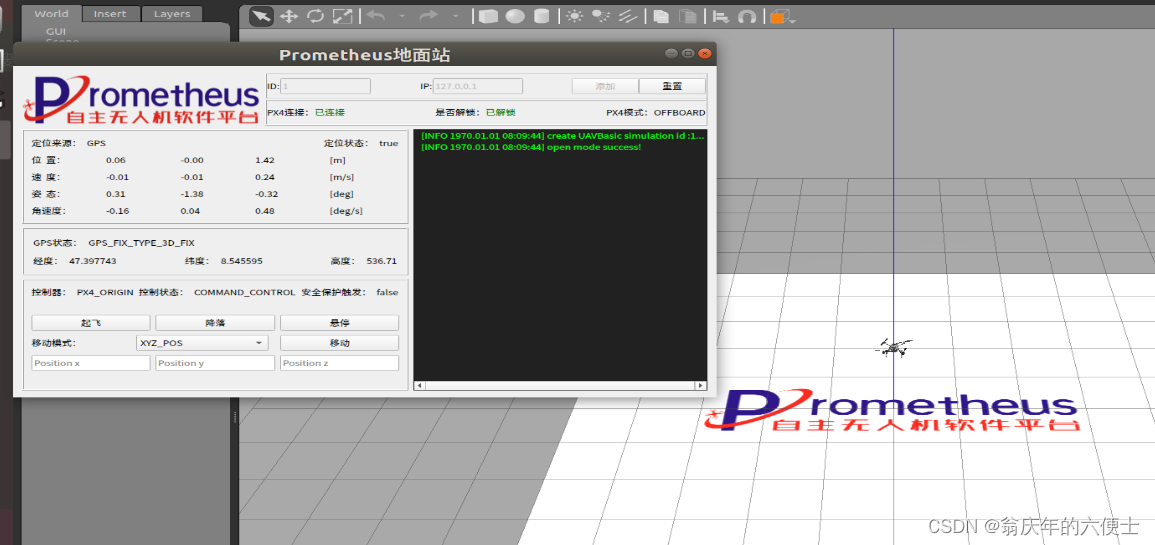
4、使用地面站控制无人机飞位置环
在地面站上点输入位置信息,比如1,1,1;然后点击移动,这个时候飞机就会移动到1,1,1位置了;
四、版本记录
px4版本
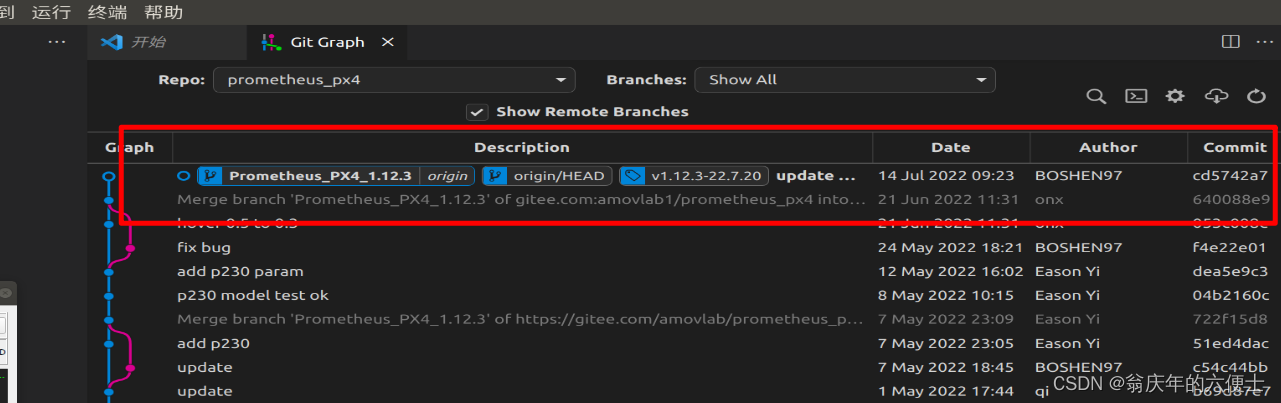
prometheus版本

五、总结和展望
(1)之前以为打开地面站就可以连接;最后发现要先启动同学的节点;教训是,还是要看官网的说明,不要想当然;
(2)地面站还是很有意义的,比如输入期望位置信息等,希望后期的地面站越做越好~
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)