文章目录
- 前言
- MOD_COMMON
- MOD_PAR
- XCP数据
- Common_Parameters定义
- IF_DATA定义XCP
- PROTOCOL_LAYER
- DAQ
- EVENT
- XCP_ON_CAN
-
- 总结
前言
在第二篇A2L文件解析的文章中,介绍了常用接口的定义内容。在实际使用过程中,进行参数定义。下面介绍具体的配置及定义。

MOD_COMMON
此关键字用于指定模块的通用描述数据,然后将其作为该模块的标准。
/begin MOD_COMMON "This is MOD_COMMON"
BYTE_ORDER MSB_LAST
ALIGNMENT_BYTE 1
ALIGNMENT_WORD 2
ALIGNMENT_LONG 4
ALIGNMENT_FLOAT32_IEEE 4
ALIGNMENT_FLOAT64_IEEE 8
ALIGNMENT_INT64 8
/end MOD_COMMON
ALIGNMENT_BYTE:声明整个模块中的BYTE对齐方式。如果参数缺失,对齐方式为1。其他同理。
BYTE_ORDER:字节序,MSB_LAST=Intel,默认为Intel
MOD_PAR
MOD_PAR关键字用于描述要为设备配置的管理数据。除了注释之外,所有参数都是可选的。暂时没有用到。
XCP数据
在A2ML中定义XCP结构:
"XCP" struct {
taggedstruct Common_Parameters; /* default parameters */
taggedstruct {
block "XCP_ON_CAN" struct {
struct CAN_Parameters; /* specific for CAN */
taggedstruct Common_Parameters; /* overruling of default */
};
}; /* transport layer parameters*/
};
Common_Parameters定义
/*********************** start of Common Parameters ***************************/
taggedstruct Common_Parameters {
block "PROTOCOL_LAYER" struct Protocol_Layer;
block "SEGMENT" struct Segment;
block "DAQ" struct Daq;
block "PAG" struct Pag;
block "PGM" struct Pgm;
block "DAQ_EVENT" taggedunion Daq_Event;
}; /******************** end of Common Parameters *****************************/
定义了第二节介绍的接口。
IF_DATA定义XCP
PROTOCOL_LAYER
/begin IF_DATA XCP
/begin PROTOCOL_LAYER
0x0101
0x07D0
0x2710
0x07D0
0x07D0
0x07D0
0x07D0
0x00
0x08
0x08
BYTE_ORDER_MSB_LAST
ADDRESS_GRANULARITY_BYTE
OPTIONAL_CMD SET_MTA
OPTIONAL_CMD UPLOAD
OPTIONAL_CMD SHORT_UPLOAD
OPTIONAL_CMD TRANSPORT_LAYER_CMD
OPTIONAL_CMD DOWNLOAD
OPTIONAL_CMD DOWNLOAD_NEXT
OPTIONAL_CMD SHORT_DOWNLOAD
OPTIONAL_CMD SET_CAL_PAGE
OPTIONAL_CMD GET_CAL_PAGE
OPTIONAL_CMD GET_PAG_PROCESSOR_INFO
OPTIONAL_CMD GET_PAGE_INFO
OPTIONAL_CMD SET_DAQ_PTR
OPTIONAL_CMD WRITE_DAQ
OPTIONAL_CMD SET_DAQ_LIST_MODE
OPTIONAL_CMD GET_DAQ_LIST_MODE
OPTIONAL_CMD START_STOP_DAQ_LIST
OPTIONAL_CMD START_STOP_SYNCH
OPTIONAL_CMD GET_DAQ_PROCESSOR_INFO
OPTIONAL_CMD GET_DAQ_EVENT_INFO
OPTIONAL_CMD FREE_DAQ
OPTIONAL_CMD ALLOC_DAQ
OPTIONAL_CMD ALLOC_ODT
OPTIONAL_CMD ALLOC_ODT_ENTRY
COMMUNICATION_MODE_SUPPORTED BLOCK
SLAVE
/end PROTOCOL_LAYER
第一个数字是版本号,后面七个是T1-T7

接下来两个为MAX_CTO和MAX_DTO

BYTE_ORDER_MSB_LAST表示Intel格式
后面的是定义的命令,由于本XCP没有用编程,所以跟编程相关的CMD不在定义范围内。
COMMUNICATION_MODE_SUPPORTED定义从机
DAQ
/begin DAQ
DYNAMIC
0x00
0x2D
0x00
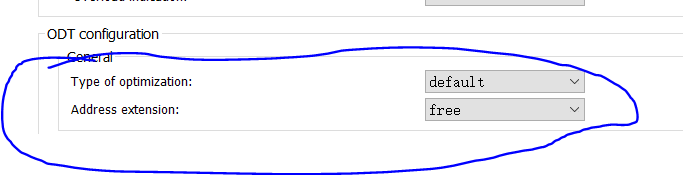
OPTIMISATION_TYPE_DEFAULT
ADDRESS_EXTENSION_FREE
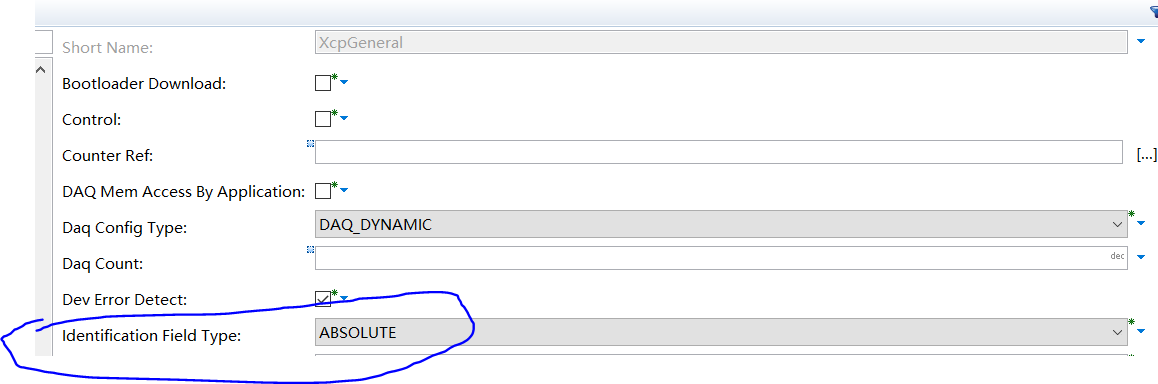
IDENTIFICATION_FIELD_TYPE_ABSOLUTE
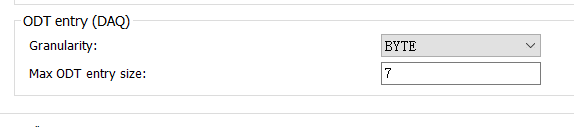
GRANULARITY_ODT_ENTRY_SIZE_DAQ_BYTE
0x07
OVERLOAD_INDICATION_PID
/begin STIM
GRANULARITY_ODT_ENTRY_SIZE_STIM_BYTE
0x07
/end STIM
目前XCP只支持DYNAMIC DAQ
MAX_DAQ为0.因为是动态DAQ
MAX_EVENT_CHANNEL为0x2D,根据实际EVENT数决定,配置时是大于实际EVENT数的。
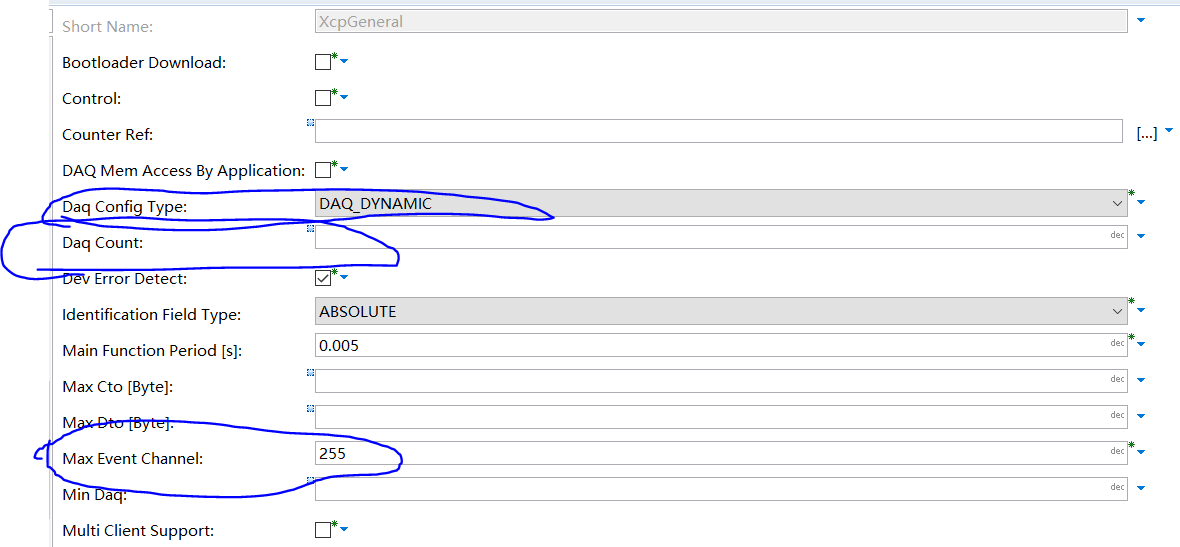
MIN_DAQ为0.因为是动态DAQ
OPTIMISATION_TYPE;这个默认
ADDRESS_EXTENSION:free
不知道配置在哪。在标定软件中有显示可以配置。
IDENTIFICATION_FIELD_TYPE_ABSOLUTE,在下图中配置
OVERLOAD_INDICATION_PID,不知道配置在哪。在标定软件中有显示可以配置。

MAX_ODT_ENTRY_SIZE_DAQ:0x07
因为TIMESTAMP选择的是NO_TIME_STAMP,所以时间戳不可用

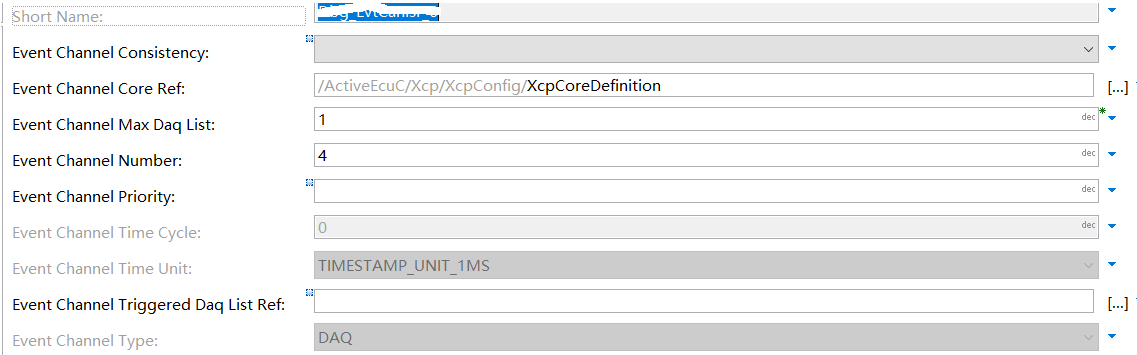
EVENT
以其中一个event为例:
/begin EVENT
"Dlt_EvtMsg"
"Dlt_EvtM"
0x1E
DAQ
0x01
0x00
0x06
0x00
/end EVENT
事件名:Dlt_EvtMsg
短名:Dlt_EvtM
事件编号:0x1E
数据传输类型:DAQ
最大DAQ LIST数量:1
事件循环周期:0
事件时间单位:6,“UNIT_1NS” = 0,
“UNIT_10NS” = 1,
“UNIT_100NS” = 2,
“UNIT_1US” = 3,
“UNIT_10US” = 4,
“UNIT_100US” = 5,
“UNIT_1MS” = 6,
“UNIT_10MS” = 7,
“UNIT_100MS” = 8,
“UNIT_1S” = 9,
“UNIT_1PS” = 10,
“UNIT_10PS” = 11,
“UNIT_100PS” = 12
事件优先级:0
XCP_ON_CAN
CAN_Parameters
0x0102
CAN_ID_MASTER 0x0xxx
CAN_ID_SLAVE 0x0xxx
BAUDRATE 0x07A120
SAMPLE_POINT 0x50
SAMPLE_RATE SINGLE
BTL_CYCLES 0x0A
SJW 0x01
MAX_DLC_REQUIRED
XCP on CAN version 版本号:0x0102
CAN_ID_MASTER:主机ID-0x0xxx
CAN_ID_SLAVE:从机ID-0x0xxx
BAUDRATE:500K,0x07A120
SAMPLE_POINT:采样点80
SAMPLE_RATE:采样率SINGLE
BTL_CYCLES:每个bit的slot数,10
SJW:同步段长度,1
MAX_DLC_REQUIRED:主从机的DLC始终为8
PROTOCOL_LAYER和前面设置的一致

CAN相关的信息在DBC或Arxml中设置。
总结
至此,A2L文件中的内容就介绍完了。关于XCP协议及代码实现,后面有空再继续学习。
若你觉得本文对你有帮助,欢迎点赞,关注,收藏,转发~~~
你的鼓励是对小弟的最大支持~~~
建了一个WX公众号,《汽车电子学习笔记》感兴趣可以关注一下~~~文章都会同步更新~
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)