目录
- 基于STM32老人跌倒检测系统实现
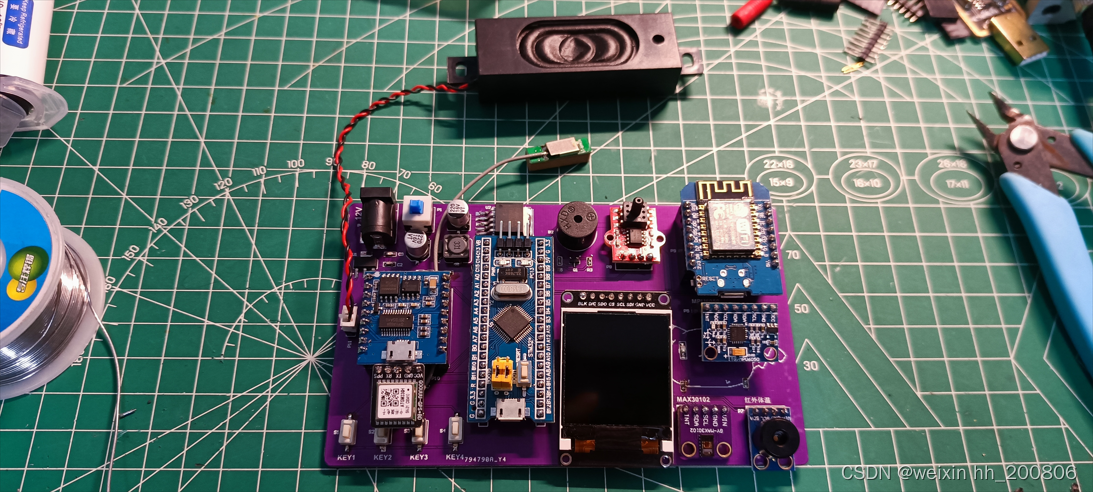
- 一、功能展示
- 二、硬件方案
-
- 三、软件实现
-
- 四、实现原理(持续更新)
- 3.1 跌倒算法实现
- 3.2 心率血氧检测
- 3.3 红外测量体温
- 3.4 网络数据通信
- 3.5 语音交互实现
- 3.6 屏幕界面显示
- 五、资料打包(持续更新)
基于STM32老人跌倒检测系统实现
一、功能展示


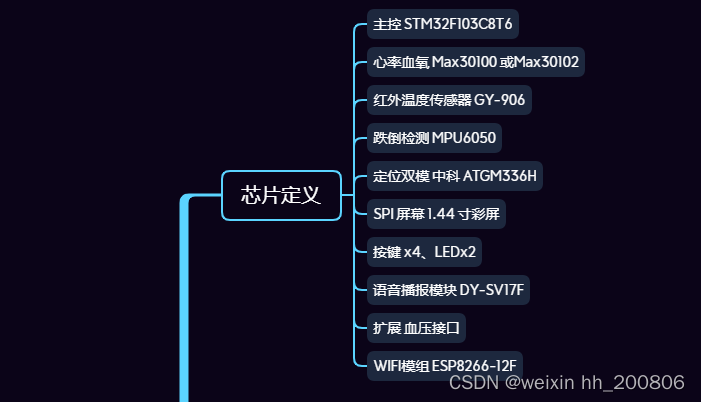
二、硬件方案
2.1 模组选型
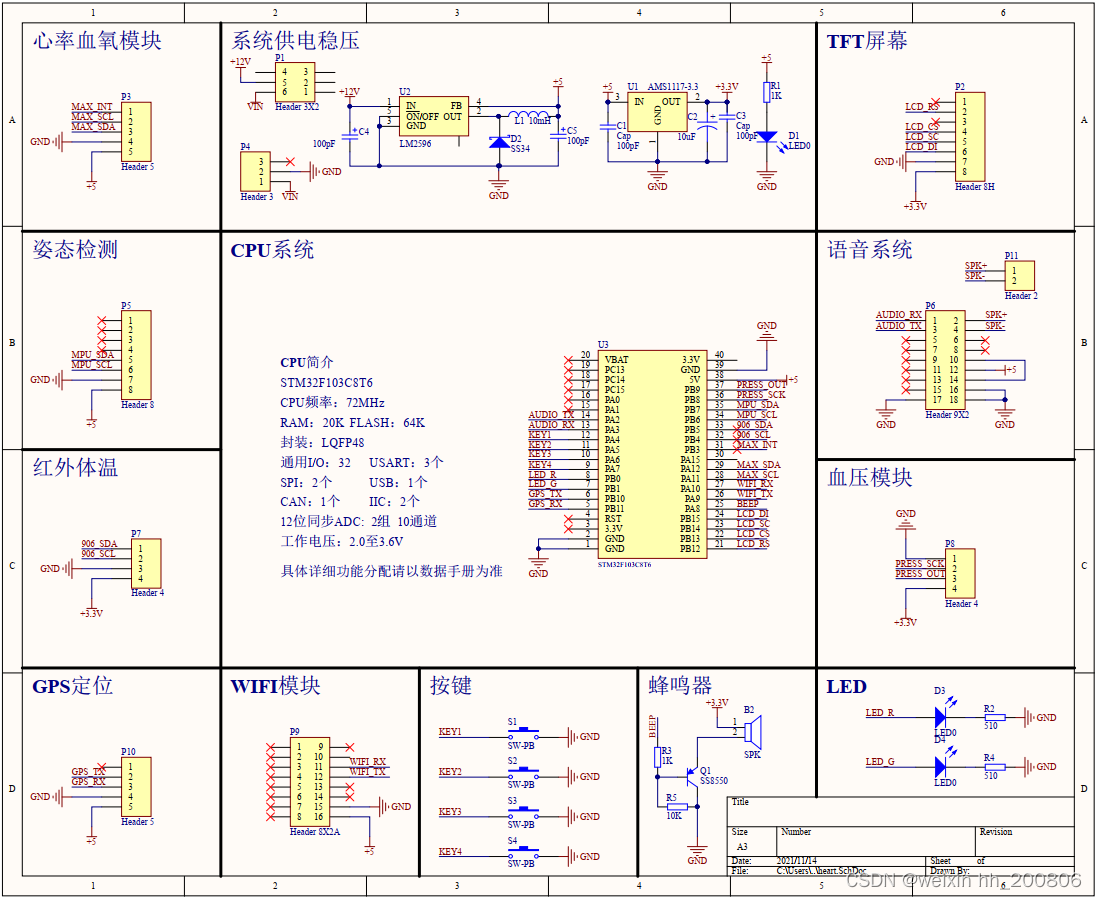
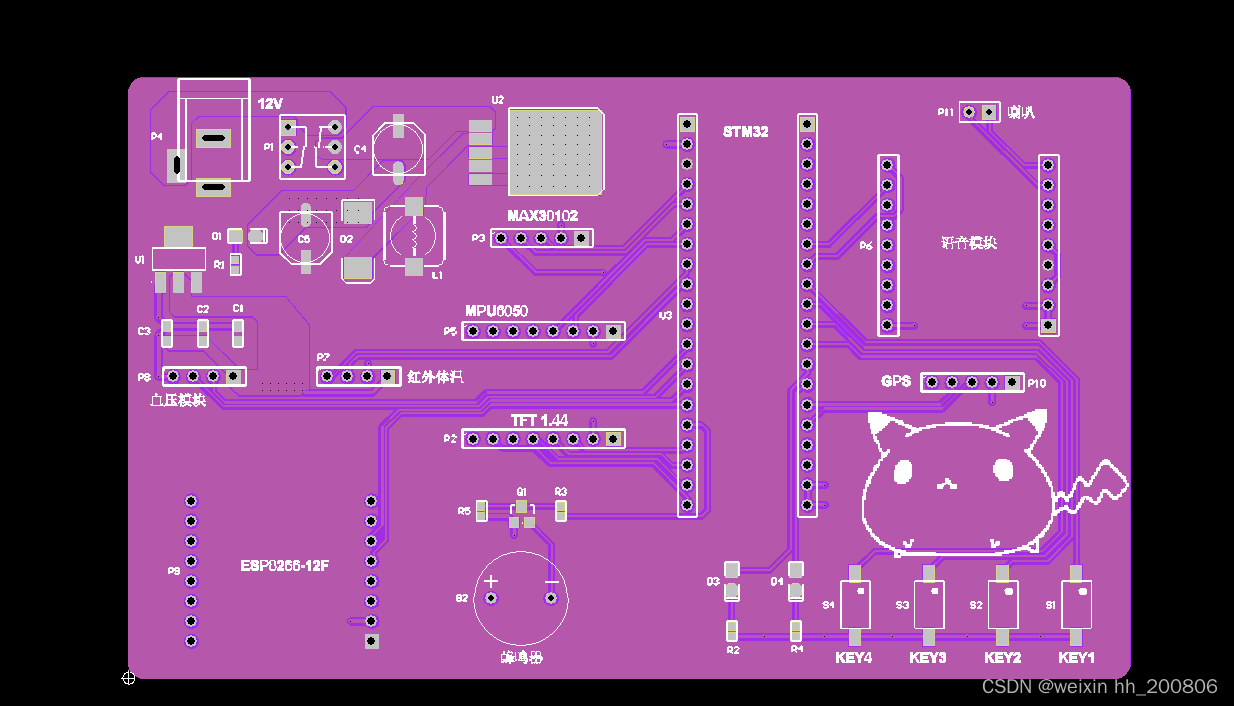
2.2 硬件设计
三、软件实现
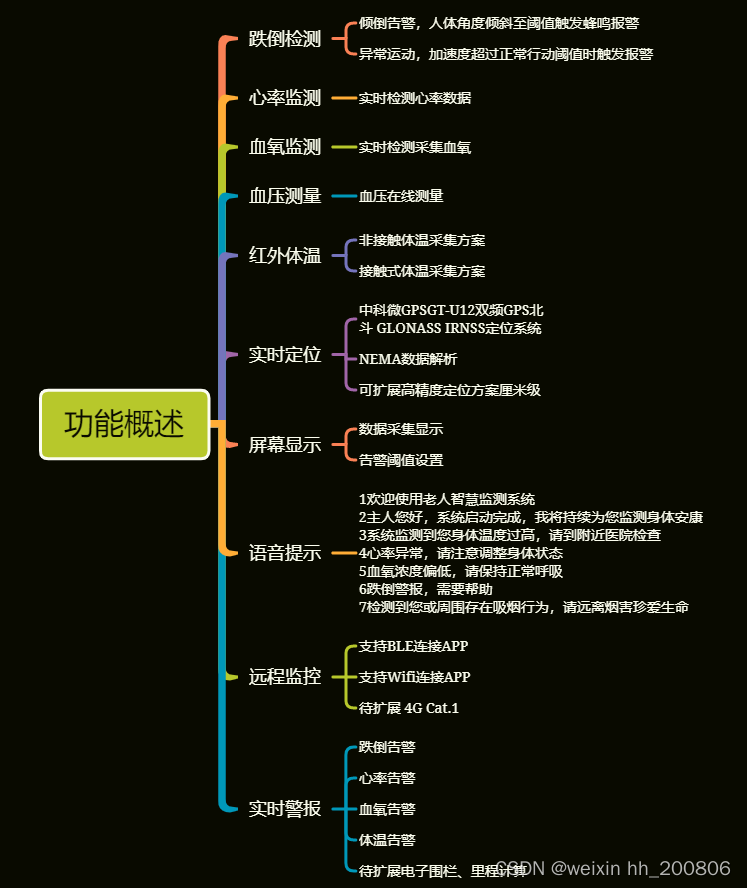
3.1功能概述
3.2软件平台

四、实现原理(持续更新)
3.1 跌倒算法实现
3.2 心率血氧检测
3.3 红外测量体温
3.4 网络数据通信
3.5 语音交互实现
3.6 屏幕界面显示
五、资料打包(持续更新)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)