STM32人体检测(体温、心率、心跳、跌倒检测)+zigbee
笔者前言
在闲鱼有缘结识的一个哥们,帮助做的基于STM32人体检测系统,我负责硬件程序开发设计,哥们负责客户端服务器微信程序的实现,人体检测系统要求将测得数据通过zigbee传输到坏境检测系统中。
该文章为基础版本 - 新版本已更新
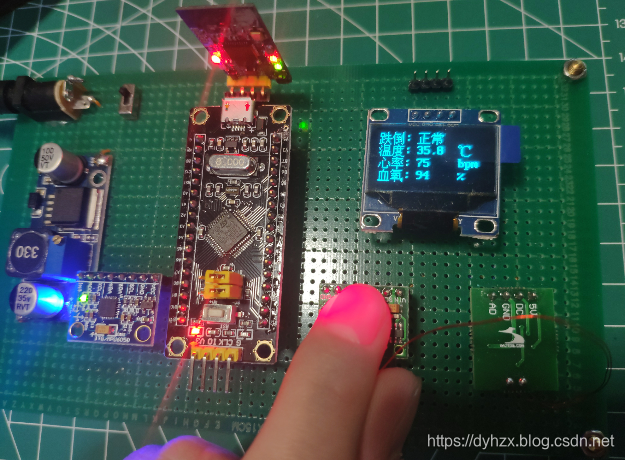
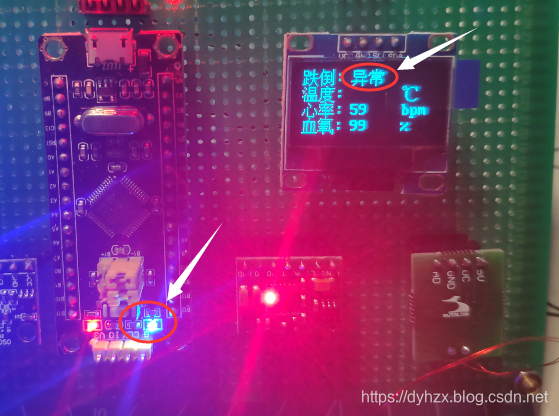
系统成品图
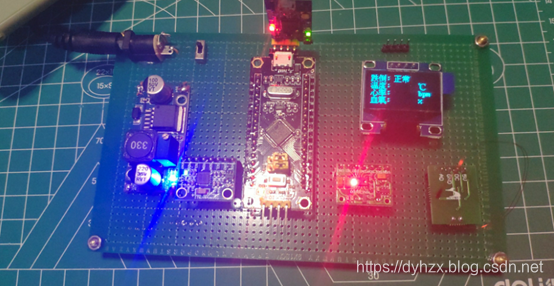
模块选用
-
STM32f103c8t6
-
0.96 oled IIC 模块
-
max30100心率血氧模块
-
mpu-6050模块
-
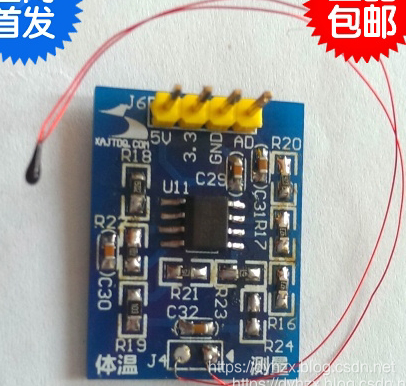
人体温度模块 (某宝54元买的价格有点贵哈)
-
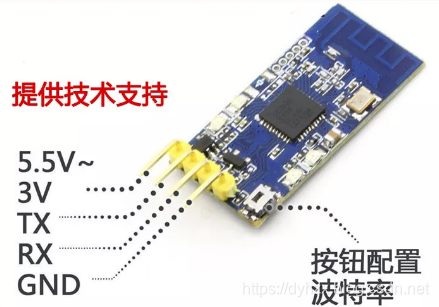
zigbee转串口模块
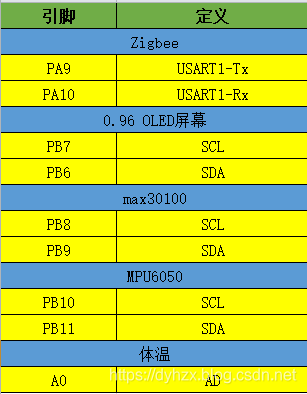
接线
功能概述
1.跌倒检测
*速度瞬态变化
人体加速度向量幅值SVM和微分加速度幅值的绝对平均值DSVM是区分人体运动状态的重要参量。SVM通过计算加速度幅度表征人体运动的剧烈程度,其值越大表明运动越剧烈。DSVM通过计算SVM的微分绝对值的时间平均表征人体运动状态变化的剧烈程度,其值越大表明运动状态变化越剧烈。其定义为:在动态坐标系下考察SVM和DSVM,可监测人体的运动强度和运动状态变化强度。

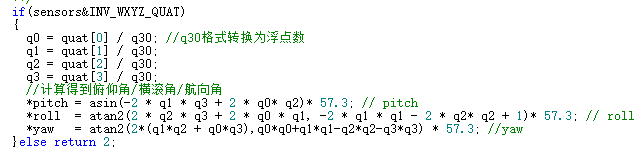
*姿态角判断
利用三轴加速度和重力的关系,经过四元运算测量得到 俯仰角、横滚角、航向角
mpu6050驱动上位机测试
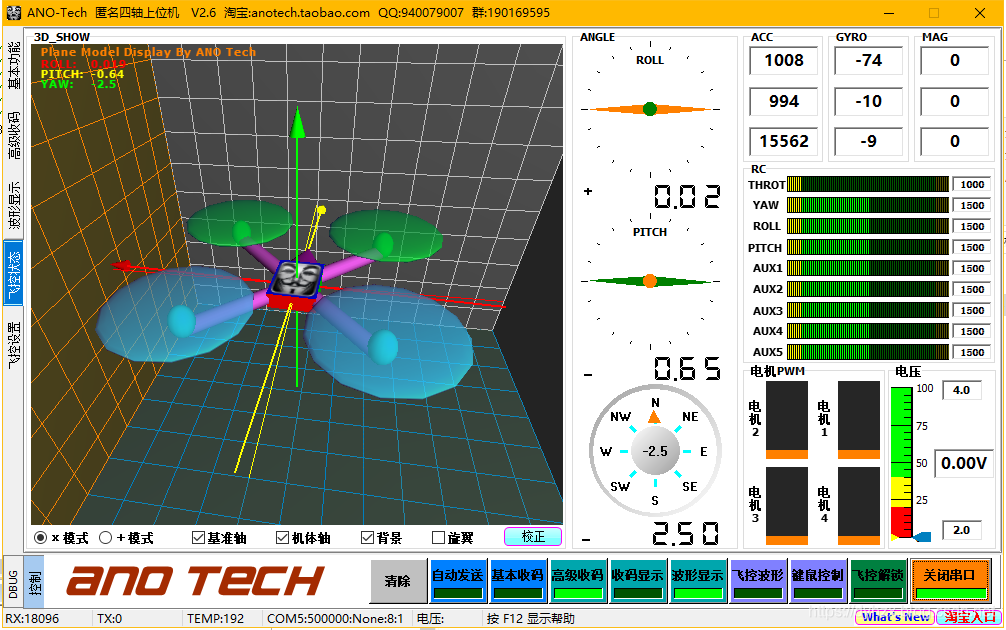
判定标准:
-
SVM正常状态下值是17000左右,当将其加速晃动时,分析得到的安全加速度约在12000~22000之间(模拟测试值,仅供参考),当超出阈值时,5秒内都判定为异常,且板载蓝色LED灯亮。
-
三轴欧拉偏角大于 40°时 即异常
人体体位的另一个重要特征就是身体的倾角,调查显示,人体处于直立状态时,躯干与重心方向的倾角小于60度;而人体处于水平状态时,倾角接近90度;人体在跌倒时,躯干从直立状态变为接近水平的状态。所以可以将人体倾角值是否大于60度来作为辅助判断跌倒的特征,倾角值可通过倾角传感器获得。
2.人体温度
线性区间温度30—44度/电压2.127–1.193V

获取温度流程:
- 模块AO输出捕获ADC平均有效值换算成电压值
- 根据驱动例程提供的数据表,用电压值匹配电阻表
- 电阻表匹配对应温度值
3.心率血氧浓度
当LED光射向皮肤,透过皮肤组织反射回的光被光敏传感器接受并转换成电信号再经过AD转换成数字信号,简化过程:光–> 电 --> 数字信号。根据官方历程移植代码,中途遇到很多问题,血氧的测量,相比心率血氧测量难度较大而且精度不算太高,寄存器中文描述可参考此链接
程序设计流程如下
- 先初始化IIC,再初始化血氧模块SPO2_Init()
- 检查样本,采样获取红外FIFO、红外FIFO 的AC值
- 对红外FIFO、红外FIFO过滤脉冲值
- 根据相应的算法 光电容积脉搏波描记法PPG 获取心跳速率、血氧浓度
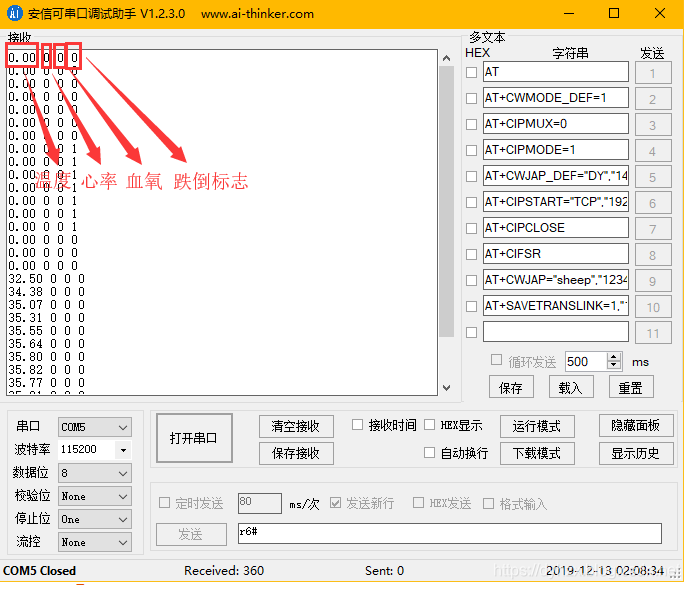
zigbee发送数据
USART -> zigbee只需要 串口 printf 就可以完成数据的传输
使用该模块前需要配置模块我这里配置的波特率是115200

注意:
- 温度测量范围是 30-44°,其他范围默认取值为零
- 心跳有效范围设置为20-300,血氧是百分比值0-100
- 跌倒标志位【0:正常 1:异常】
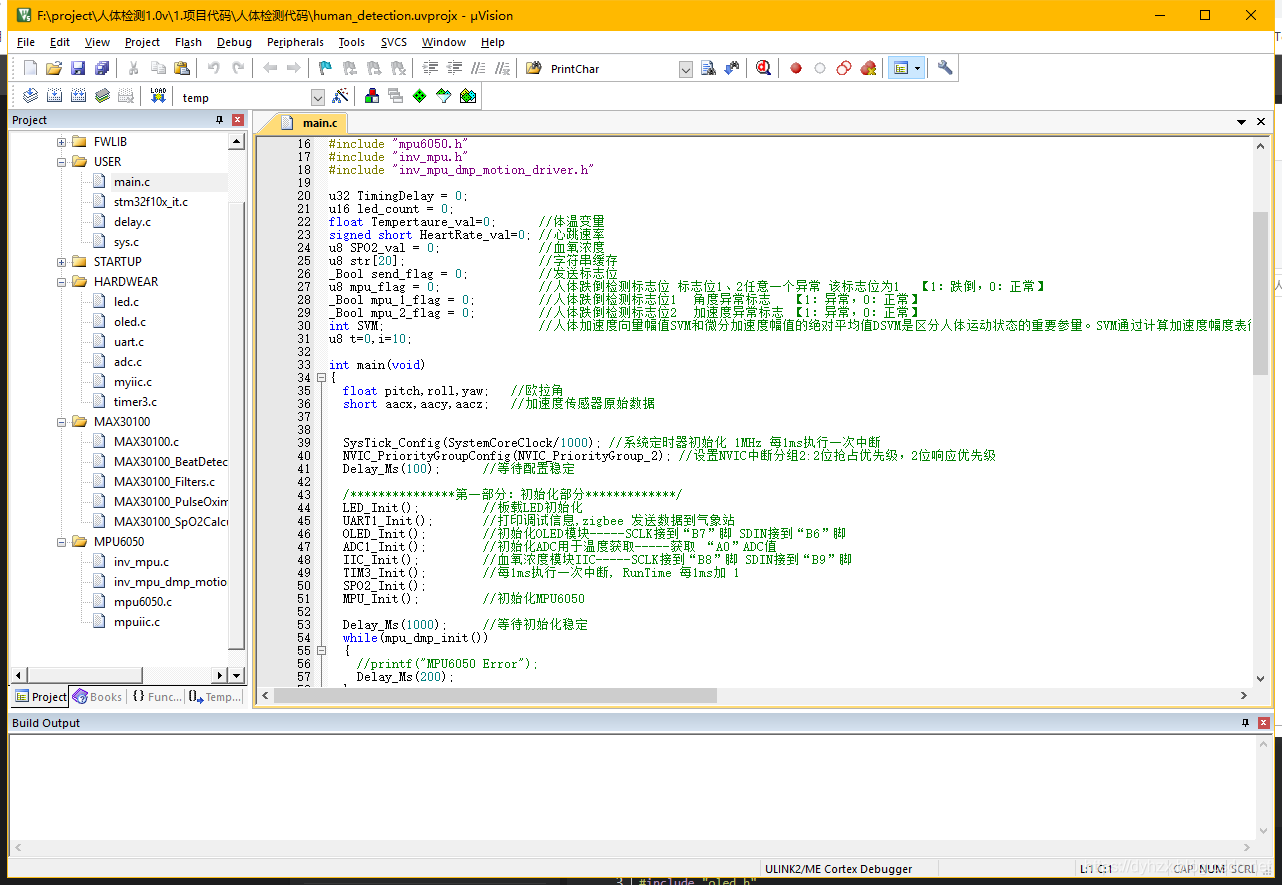
代码
main函数代码
#include "adc.h"
#include "led.h"
#include "oled.h"
#include "uart.h"
#include "math.h"
#include "delay.h"
#include "stdio.h"
#include "myiic.h"
#include "timer3.h"
#include "stdlib.h"
#include "MAX30100.h"
#include "stm32f10x.h"
#include "MAX30100_Filters.h"
#include "MAX30100_PulseOximeter.h"
#include "MAX30100_SpO2Calculator.h"
#include "mpu6050.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
u32 TimingDelay = 0;
u16 led_count = 0;
float Tempertaure_val=0;
signed short HeartRate_val=0;
u8 SPO2_val = 0;
u8 str[20];
_Bool send_flag = 0;
u8 mpu_flag = 0;
_Bool mpu_1_flag = 0;
_Bool mpu_2_flag = 0;
int SVM;
u8 t=0,i=10;
int main(void)
{
float pitch,roll,yaw;
short aacx,aacy,aacz;
SysTick_Config(SystemCoreClock/1000);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
Delay_Ms(100);
LED_Init();
UART1_Init();
OLED_Init();
ADC1_Init();
IIC_Init();
TIM3_Init();
SPO2_Init();
MPU_Init();
Delay_Ms(1000);
while(mpu_dmp_init())
{
Delay_Ms(200);
}
show_interface();
while(1)
{
POupdate();
Tempertaure_val = get_temp();
show_temp(Tempertaure_val);
if((t%10)==0)
{
if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
{
MPU_Get_Accelerometer(&aacx,&aacy,&aacz);
SVM = sqrt(pow(aacx,2)+ pow(aacy,2) + pow(aacz,2));
if( fabs(pitch)>40 || fabs(roll)>40 || fabs(yaw)>40 )
mpu_1_flag = 1;
else
mpu_1_flag = 0;
if( SVM>23000 || SVM<12000 )i = 0;
i++;
if( i<=10 )mpu_2_flag = 1;
else
{
i = 10;
mpu_2_flag = 0;
}
if( mpu_2_flag || mpu_1_flag )mpu_flag = 1;
else mpu_flag = 0;
show_mpu(mpu_flag);
}
t=0;
}
t++;
if(send_flag)
{
printf("%0.2f %d %u %u\r\n",Tempertaure_val,HeartRate_val,SPO2_val,mpu_flag);
send_flag=!send_flag;
}
Delay_Ms(10);
}
}
void SysTick_Handler(void)
{
TimingDelay--;
led_count++;
if(led_count>=1000)
{
led_count=0;
send_flag=!send_flag;
}
}

下载地址
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)