1、选择相应的调试仿真连接器: 选择:project->Options for Target 如下图所示: 然后在弹出对话框的Debug选项下选择仿真器的型号: 2、进入调试: 3、部分调试工具说明: 如上图所示从左到右分别是:Reset复位操作、全速运行、停止运行、进入当前函数、跳过当前函数、弹出当前函数、单步运行。功能描述如下所示: Reset复位:软件复位操作、程序会从头开始执行 全速运行:程序会一直执行直到碰到断点为止 停止运行:用于终止正在运行状态的程序 进入当前函数:单步执行,进入当前程序执行光标所在位置的函数 跳过当前函数:直接执行完毕当前光标所在位置的函数 弹出当前函数:一直执行直到执行完当前函数 单步运行:程序一行一行的运行
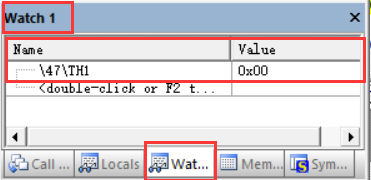
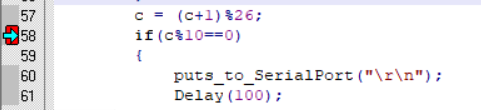
调试时动态查看某个变量的值 1、在.c的文件中选择要查看的变量,右击选择Add to选项,如下所示: 添加到 Watch1,Watch2都可以。 在新弹出的watch窗口就可以看到添加的watch窗口变量的值: 这个值是随程序的执行而随时变化的,只有当程序执行停止后才可以看到相应的值,若想看选定变量的值,应该在变量的逻辑后方添加断点,当程序全速执行到断点的位置停止后变量的值就会在watch窗口显示。 如上图所示,若想在执行过程中动态查看c的值,可以在如图位置设置断点,然后点击全速运行,每次程序执行到断点位置时既可以观察到c变量的值。




 添加到 Watch1,Watch2都可以。
添加到 Watch1,Watch2都可以。