1.编写任务代码、Cmake文件
~/PIX4/Firmware/src/examples$
在该目录下创建文件夹 px4_01
~/PIX4/Firmware/src/examples/px4_01$
创建文件
px4_01.c
#include <px4_platform_common/log.h>
__EXPORT int px4_01_main(int argc, char *argv[]);
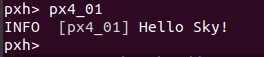
int px4_01_main(int argc, char *argv[]) { PX4_INFO("Hello Sky!");return OK; }
CMakeLists.txt
px4_add_module(
MODULE examples__px4_01
MAIN px4_01
STACK_MAIN 2000
SRCS
px4_01.c
DEPENDS
)
2.编译
将任务导入对应的飞控版本编译,我用的是模拟器进行操作,所以直接操作sitl
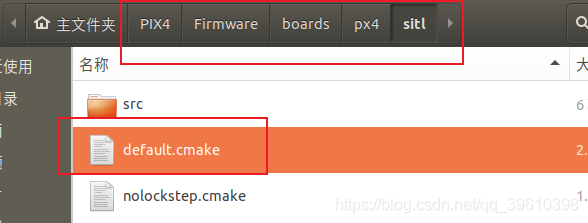
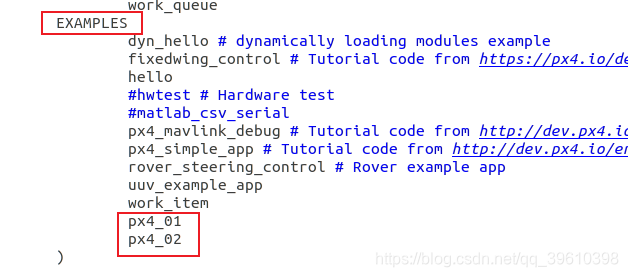
修改default.cmake,添加px4_01
~/PIX4/Firmware$ make px4_sitl jmavsim
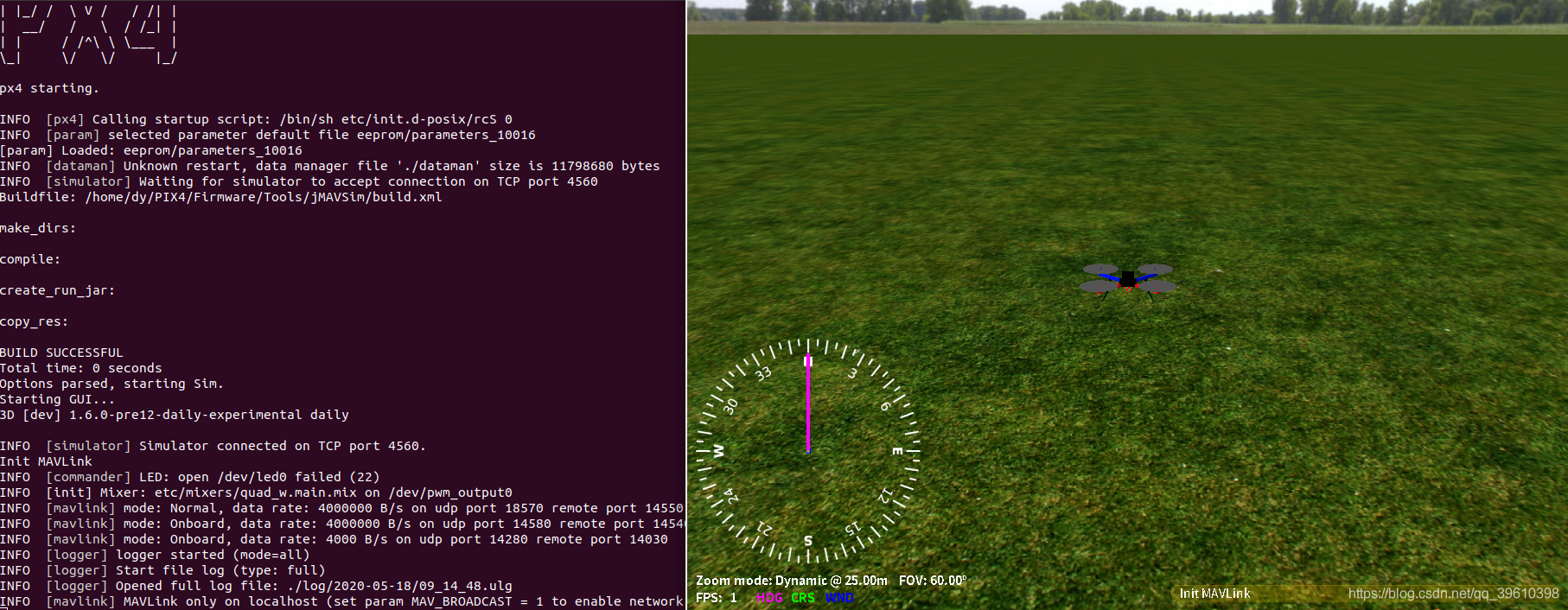
终端回车->“help”指令
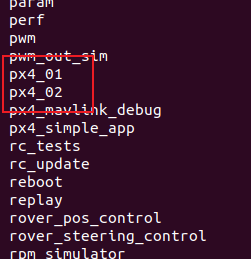
运行打印测试
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)