一.什么是k8s:
k8s是一个使用go编写的谷歌内部容器管理系统的开源版,他由CNCF基金会进行管理。版本叠代周期为三个月
二.k8s的基本概念
(1)cluster:是计算、存储、网络的资源集合、k8s利用这些资源运行各种容器应用
(2)pod:是k8s的最小调度单位,一个pod对应一个或多个container使其作为一个逻辑单元更加便于管理,通常情况会将紧密相连的一组应用放到一个pod,所以一个pod里面的container关系一个网络栈和一块存储空间。同时pod也是k8s的直接管理对象,pod可以对封装在其内部的容器进行操作(例如docker和rkt)。同时同一个pod的container共享一个网络栈和存储使其可以直接互相访问并互相使用存储卷。可以将其理解为pod是虚拟机,内部容器是一个个服务。
(3)controller:是用来创建或管理pod的,它定义了pod的部署特性和在什么node上运行。
deployment:是最常用的controller用于管理多个pod副本并确保pod按正常状态运行并集成了上线部署、滚动升级、弹性伸缩等功能。
replicaset:实现了多个pod的副本管理,使用deployment时会自动创建replicaset可以说deployment是通过replicaset来管理多个pod的,所以我们通常不单独使用它而是和deployment一起使用。
daemonset:是用于每个node最多只运行一个pod的场景,daemonset通常用于运行daemon
statefuleset:用于保证pod的每个副本再整个生命周期中名称是不变的,当某个pod发生故障需要删除或重新启动是pod的名称会发生变化,同时statefulset会保证副本按照固定顺序启动、更新或删除
job:用于运行结束就删除的应用
(4)service:是一个负载均衡器,他是为一组功能相同的pod提供统一入口。同时service有自己的ip(cluster-ip)和端口(port)内部可以通过endpoint(clusterip+port)去访问引用但是这个cluster-ip是个Virtual IP它无法ping通,是通过调用ipvs进行网络转发的。
service的转发后端四种方式
1.cluster IP
2.nodeport(通过暴露宿主机的端口进行转发)
3.ingress(七层负载均衡)
4.loadblance(去控制公有云的负载均衡器自动添加port规则进而利用负载均衡器进行转发
service的三种端口类型
1.port (本身端口)
2.targetport (pod的端口)
3.nodeport(在宿主机上暴露的端口)
(5)namespace:是用于将用户创建的controller和pod等资源进行分开的,他可以将一个物理cluster划分成多个虚拟的cluster整理资源的同时还可以进行管理(类似与open stack的project)还可以对不同的namespace设置quota
k8s默认的namespace:
1.default(默认创建的资源将放在这个namespace里面)
2.kube-system(k8s自己创建的系统资源将放在这里面)
3.kube-punlic(k8s自己创建的命名空间用于保证整个集群公开看到的某些资源创建pod时指定namespace)
(6)label:以key|value为键值对的形式附加到各种对象上,如pod、node等。service通过selector label建立service和pod的关联,简单来说资源和资源之间都是通过label关联的,通过给一个资源绑定一个或多个label来实现多维度的资源管理,selector label类似于sql语句的where。
三.k8s的架构
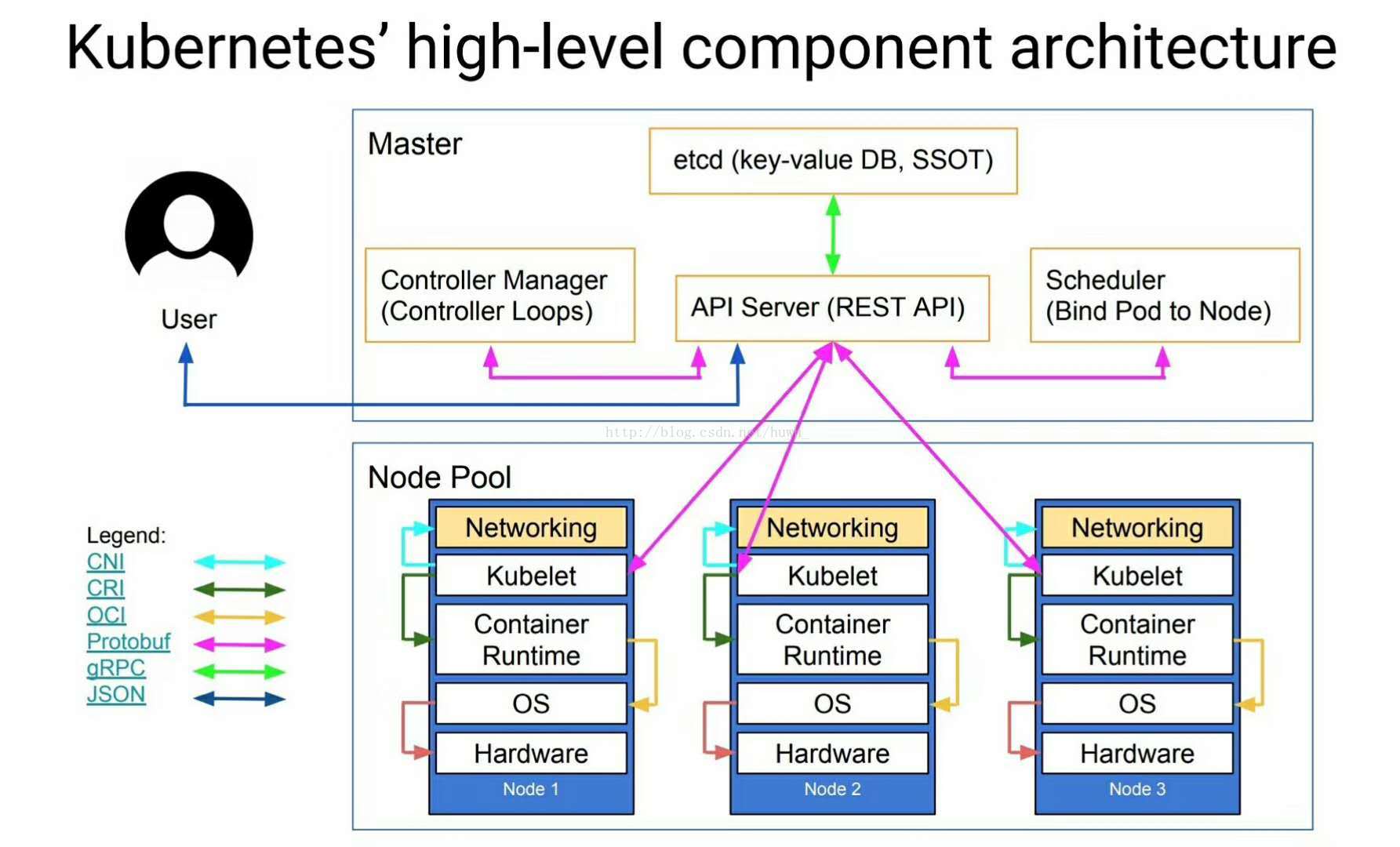
典型的master-slave架构
1.master:作为集群大脑 node用于承载部署的容器应用
master节点有kube-apiserver(管理整个节点的api接口,所有对集群的操作和查询都需要经过它。整个集群内模块通信的枢纽用于集群内其他模块的相互通信。集群安全控制,提供集群安全验证和角色权限分配。连接etcd。)、kube-controller-manage(复制集群的故障检测和修复,根据deployment的定义维持正确pod副本数。根据service与pod的管理关系完成服务的endpoints对象创建和更新。为新的namespace创建账户和api访问token)、etcd(k8s的后端数据存储系统,cluster中的所有资源对象数据都存储在这用于配置共享和服务发现)、kube-scheduler(创建pod是选择合适的node进行调度)它主要是用于资源管理、调度、认证、弹性伸缩、安全认证。
2.node:运行容器应用,由master管理接受master节点的各类请求,进行容器的创建和管理,并将运行在上面的容器应用上报到master节点
node节点有kubelet(负责node节点容器创建、删除监控等生命周期管理,上报node信息如cpu、内存、pod的ip等信息到master节点的api-server kube-proxy用于实现端口映射和负载均衡。kube-proxy主要有两种模式iptables和ipvs)
四.k8s的全生命周期管理
在k8s进行管理应用的时候,基本步骤是:创建集群,部署应用,发布应用,扩展应用,更新应用。
那么问题来了为什么我们要创建集群呢?为什么这么多服务都需要用到集群呢?
熟话说人多力量大,切菜一个人一分钟只能切一颗,但是要是我们有三个人呢?
使用集群为了掩盖底层的无能,在各种环境中,底层的硬件各不相同,有的是各种低廉的服务器,有的各种云环境,有的是各种vm,有的各种host machine,要想屏蔽底层的细节,增强可靠性和稳定性,并且集群可以从而需要创建集群。
创建集群的好处就是,统一对外提供接口,无须进行各种复杂的调用;提供更好的可靠性,服务器宕机那么频繁,物理磁盘那么容易损坏,无须担心,集群统一进行调配;提供更好的性能,组合集群中各个机器的计算存储网络资源,提供更好的TPS和PS;提供横向扩容的能力,在进行横向扩容的时候,性能基本上能呈线性增长。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)