梅森增益公式:
对于一些比较复杂的系统,采用结构图等效简化的方法求系统的传递函数是比较麻烦的。而使用梅森公式,则可以不用做任何变换,只要通过对信号流图进行相应的分析就能直接写出系统的传递函数。
下面不加证明地直接给出梅森公式的定义:
计算任意输入节点到输出节点的传递函数的梅森增益公式为:
P
=
1
Δ
∑
k
=
1
n
P
k
Δ
k
P=\frac{1}{\Delta} \sum_{k=1}^{n} P_{k} \Delta_{k}
P=Δ1k=1∑nPkΔk
其中
Δ
\Delta
Δ为系统的特征多项式,其计算公式为:
Δ
=
1
−
∑
L
a
+
∑
L
b
L
c
−
∑
L
d
L
e
L
f
+
⋯
\Delta=1-\sum L_{a}+\sum L_{b} L_{c}-\sum L_{d} L_{e} L_{f}+\cdots
Δ=1−∑La+∑LbLc−∑LdLeLf+⋯
其中
∑
L
a
\sum L_{a}
∑La为所有不同回路增益之和;
∑
L
b
L
c
\sum L_{b} L_{c}
∑LbLc为所有两两不接触回路增益之和;
∑
L
d
L
e
L
f
\sum L_{d} L_{e} L_{f}
∑LdLeLf为所有互不接触的回路中,每次取其中三个回路的增益乘积之和;后面的以此类推。
n
n
n为从输入节点到输出节点的前向通路条数;
P
k
P_{k}
Pk为从输入节点到输出节点的第
k
k
k条前向通路的总增益;
Δ
k
\Delta_{k}
Δk为第
k
k
k条前向通路的余子式,即把特征式
Δ
\Delta
Δ中与该前向通道相接触的回路增益置零后剩余的部分。
举个栗子:
求下面系统的传递函数:
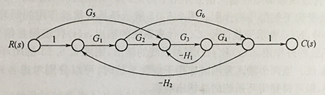
先找出所有的闭环回路:
L
1
=
−
G
1
G
2
G
3
G
4
H
2
L_{1}=-G_{1} G_{2} G_{3} G_{4} H_{2}
L1=−G1G2G3G4H2
L
2
=
−
G
1
G
6
H
2
L_{2}=-G_{1} G_{6} H_{2}
L2=−G1G6H2
L
3
=
−
G
3
H
1
L_{3}=-G_{3} H_{1}
L3=−G3H1
再找出两两不相邻回路:
L
1
L_{1}
L1和
L
2
L_{2}
L2
无三个以上互不接触回路,则系统的特征式可以写为:
Δ
=
1
−
(
L
1
+
L
2
+
L
3
)
+
(
L
2
L
3
)
=
1
+
G
1
G
2
G
3
G
4
H
2
+
G
1
G
6
H
2
+
G
3
H
1
+
G
1
G
3
G
6
H
1
H
2
\begin{aligned} \Delta=& 1-\left(L_{1}+L_{2}+L_{3}\right)+\left(L_{2} L_{3}\right)=\\ & 1+G_{1} G_{2} G_{3} G_{4} H_{2}+G_{1} G_{6} H_{2}+G_{3} H_{1}+G_{1} G_{3} G_{6} H_{1} H_{2} \end{aligned}
Δ=1−(L1+L2+L3)+(L2L3)=1+G1G2G3G4H2+G1G6H2+G3H1+G1G3G6H1H2
接着找出系统的前向通路:
P
1
=
G
1
G
2
G
3
G
4
P_{1}=G_{1} G_{2} G_{3} G_{4}
P1=G1G2G3G4
P
2
=
G
5
G
3
G
4
P_{2}=G_{5} G_{3} G_{4}
P2=G5G3G4
P
3
=
G
1
G
6
P_{3}=G_{1} G_{6}
P3=G1G6
由于各回路均与前向通路
P
1
P_1
P1、
P
2
P_2
P2接触,故其余子式
Δ
1
=
Δ
2
=
1
\Delta_{1}=\Delta_{2}=1
Δ1=Δ2=1。前向通路
P
3
P_3
P3不与
L
3
L_3
L3接触,故余子式为:
Δ
3
=
1
−
(
L
3
)
=
1
+
G
3
H
1
\Delta_{3}=1-\left(L_{3}\right)=1+G_{3} H_{1}
Δ3=1−(L3)=1+G3H1
那么可以使用梅森公式得到系统的传递函数为:
C
(
s
)
R
(
s
)
=
1
Δ
(
P
1
Δ
1
+
P
2
Δ
2
+
P
3
Δ
3
)
=
G
1
G
2
G
3
G
4
+
G
3
G
4
G
5
+
G
1
G
6
(
1
+
G
3
H
1
)
1
+
G
1
G
2
G
3
G
4
H
2
+
G
1
G
6
H
2
+
G
3
H
1
+
G
1
G
3
G
6
H
1
H
2
\begin{aligned} \frac{C(s)}{R(s)}=& \frac{1}{\Delta}\left(P_{1} \Delta_{1}+P_{2} \Delta_{2}+P_{3} \Delta_{3}\right)=\\ & \frac{G_{1} G_{2} G_{3} G_{4}+G_{3} G_{4} G_{5}+G_{1} G_{6}\left(1+G_{3} H_{1}\right)}{1+G_{1} G_{2} G_{3} G_{4} H_{2}+G_{1} G_{6} H_{2}+G_{3} H_{1}+G_{1} G_{3} G_{6} H_{1} H_{2}} \end{aligned}
R(s)C(s)=Δ1(P1Δ1+P2Δ2+P3Δ3)=1+G1G2G3G4H2+G1G6H2+G3H1+G1G3G6H1H2G1G2G3G4+G3G4G5+G1G6(1+G3H1)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)