今天建立docker容器的时候由于疏忽,镜像的名字输错了,结果容器创建成功后,镜像中出现两个id相同
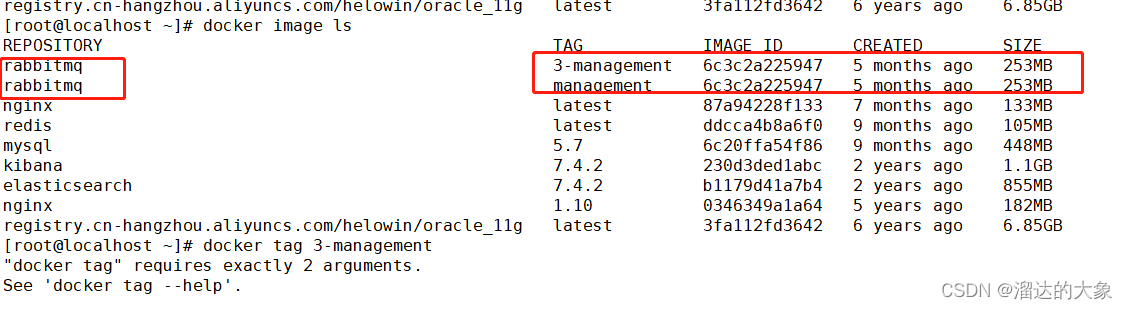
我们要删除第一个:
docker rmi imageID 是删除口令
这种情况的操作:
docker rmi REPOSITORY:TAG
按照这个命令 套用这个场景的操作指令:
docker rmi rabbitmq:3-management

完美解决
1.多个变量赋值
a = b = c = 1
a,b,c = 1,1.1,"zhao"
2.标准数据类型
Python3 中有六个标准的数据类型:
- Number(数字)
- String(字符串)
- List(列表)
- Tuple(元组)
- Set(集合)
- Dictionary(字典)
Python3 的六个标准数据类型中:
- **不可变数据(3 个):**Number(数字)、String(字符串)、Tuple(元组);
- **可变数据(3 个):**List(列表)、Dictionary(字典)、Set(集合)。
2.1Number
int、float、bool、complex(复数)
内置的 type() 函数可以用来查询变量所指的对象类型
a,b,c,d = 10,2.3,True,3+5j
print(type(a))
print(type(b))
print(type(c))
print(type(d))
<class 'int'>
<class 'float'>
<class 'bool'>
<class 'complex'>
isinstance 猜测函数类型
print(isinstance(a,int));print(isinstance(a,bool))
True
False
isinstance 和 type 的区别在于:
- type()不会认为子类是一种父类类型。
- isinstance()会认为子类是一种父类类型。
>>> class A:
... pass
...
>>> class B(A):
... pass
...
>>> isinstance(A(), A)
True
>>> type(A()) == A
True
>>> isinstance(B(), A)
True
>>> type(B()) == A
False
**注意:**在 Python2 中是没有布尔型的,它用数字 0 表示 False,用 1 表示 True。到 Python3 中,把 True 和 False 定义成关键字了,但它们的值还是 1 和 0,它们可以和数字相加。
指定一个值时,Number对像就被创建
var1=1,var2=2
del 删除对像的引用
del var1,var2
>>> 5+3
8
>>> 4.1-1
3.1
>>> 3*1
3
>>> 2/1
2.0
>>> 2 // 4
0
>>> 13 % 4
1
>>> 2**6
64
- 1、Python可以同时为多个变量赋值,如a, b = 1, 2。
- 2、一个变量可以通过赋值指向不同类型的对象。
- 3、数值的除法包含两个运算符:/ 返回一个浮点数,// 返回一个整数。
- 4、在混合计算时,Python会把整型转换成为浮点数。
>>> a=1
>>> print(type(a))
<class 'int'>
>>> a=1.1
>>> print(type(a))
<class 'float'>
2.2 String 字符串
Python中的字符串用单引号 ’ 或双引号 " 括起来,同时使用反斜杠 \ 转义特殊字符。
字符串的截取的语法格式如下:
变量[头下标:尾下标]
索引值以 0 为开始值,-1 为从末尾的开始位置。
str = 'MyFirstPythonStr'
print(str)
print(str[0:-1])
print(str[0])
print(str[2:5])
print(str[2:])
print(str * 2)
print(str + "TEST")
MyFirstPythonStr
MyFirstPythonSt
M
Fir
FirstPythonStr
MyFirstPythonStrMyFirstPythonStr
MyFirstPythonStrTEST
反斜杠 \ 转义特殊字符
防止反斜杠发生转义 r,表示原始字符串
print('Ru\noob')
print(r'Ru\noob')
Ru
oob
Ru\noob
反斜杠\可以作为续行符,表示下一行是上一行的延续。也可以使用 “”“…”“” 或者 ‘’‘…’‘’ 跨越多行
Python 没有单独的字符类型,一个字符就是长度为1的字符串
word = 'ZhaoPh'
print(word[0], word[5])
print(word[-1], word[-6])
Z h
h Z
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)