首先对于下面这种二级倒立摆,对其进行建模:进行以下参数假设:可以通过参考论文,使用牛顿运动定律和拉格朗日方程,结合θ1和θ2无外力作用,列出方程:即可得到如下的对于二级倒立摆模型的非线性方程建模:
通过在平衡位置进行线性化可以得到如下的状态方程:把状态方程写进S-Function函数:Inverted_Pendulum_model_linear,是一个单输入三输出,6个连续状变量态的状态方程组,即可以根据这些信息和状态方程写出S函数。 分析状态方程,可以得知:二级倒立摆的线性化模型是能控,能观,但是不稳定的系统,若采用PID调节器可以使用PD,尽量避免使用I,会导致更不稳定。 若使用PD调节器,需要进行参数配置,其系统闭环控制图如下: 可以写出传递函数: 下面进行极点配置,若期望的极点是: 则令闭环传递函数的分母与其相等,解出相应的PD调节器的参数,搭建闭环系统simulink模型,进行仿真,可以得到如下的结果:
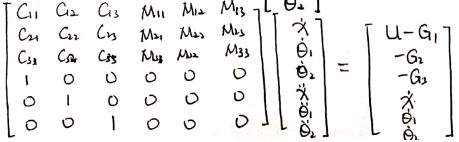
下面进行非线性化的建模以及仿真,非线性化是根据二级倒立摆模型的非线性方程进行变形,得到如下的形式:将非线性化方程分解得到如上的参数设计,其满足: 即可使用S-Function来得到一个单输入,三输出的非线性模型——得到Inverted_Pendulum_model_nonlinear,从而完成非线性方程S函数的建模,根据上述的线性建模匹配得到的PD调节器,进行仿真,可以得到其结果有扰动和无扰动如下:
二级倒立摆的建模、线性化S函数的PID控制以及非线性化S函数的PID控制, (1) 根据牛顿运动定律或者拉格朗日方程,建立直线型二级倒立摆的非线性运动模型,给出系统运动的状态方程。 (2) 对非线性运动模型进行线性化,针对线性化模型采用极点配置或者PID控制的方法,设计直线型二级倒立摆的控制方案,给出控制律设计方法; (3) 分别针对有扰动和无扰动两种情况下,采用Matlab软件进行仿真,编写倒立摆非线性运动模型的S函数,结合设计的控制方案,给出Matlab仿真的框图,并给出仿真结果。 其资源地址:https://download.csdn.net/download/weixin_43058070/11249976
 进行以下参数假设:
进行以下参数假设: 可以通过参考论文,使用牛顿运动定律和拉格朗日方程,结合θ1和θ2无外力作用,列出方程:
可以通过参考论文,使用牛顿运动定律和拉格朗日方程,结合θ1和θ2无外力作用,列出方程: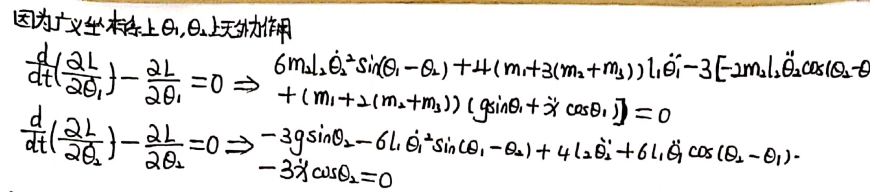 即可得到如下的对于二级倒立摆模型的非线性方程建模:
即可得到如下的对于二级倒立摆模型的非线性方程建模:
 把状态方程写进S-Function函数:Inverted_Pendulum_model_linear,是一个单输入三输出,6个连续状变量态的状态方程组,即可以根据这些信息和状态方程写出S函数。
把状态方程写进S-Function函数:Inverted_Pendulum_model_linear,是一个单输入三输出,6个连续状变量态的状态方程组,即可以根据这些信息和状态方程写出S函数。




 将非线性化方程分解得到如上的参数设计,其满足:
将非线性化方程分解得到如上的参数设计,其满足: