作为多年使用PIXHAWK的玩家,相信大家或多或少被磁罗盘报错折磨过。由于磁非常容易受周围环境的干扰和自身结构的金属部分干扰。经常我们今天校准好的罗盘,什么也没动,明天上电发现罗盘报错。对于330、450这种尺寸的无人机校准一下还好,但对尺寸较大的无人机、无人车、无人船来说,校准是个非常头疼的事情。首先尺寸大,很难直接去360度转无人机或者无人车,可把控制器和罗盘取下来校准好再装上去,可能又会发现罗盘报错。针对这种情况,我看到了有不少模友在用双天线来替代次罗盘,这样就可以无需校准校准磁罗盘,只要在室外开拓的地方就可以使用了。
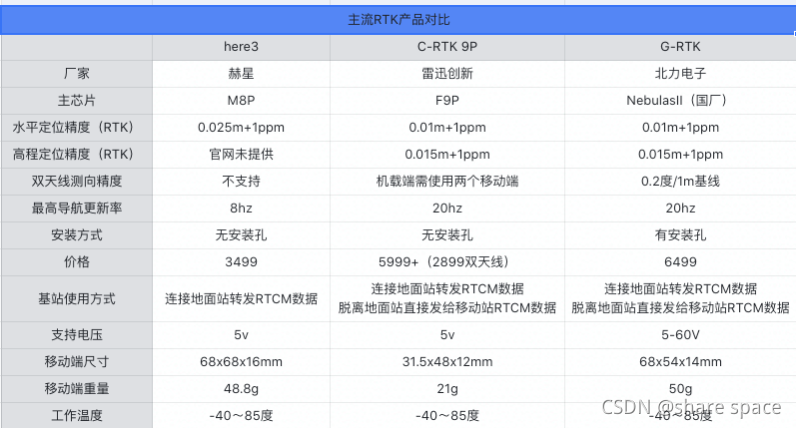
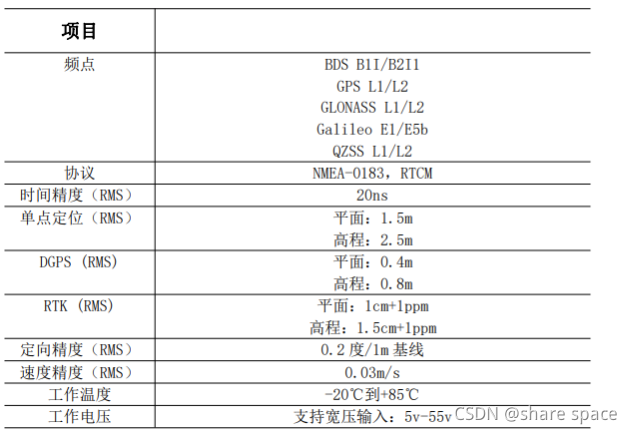
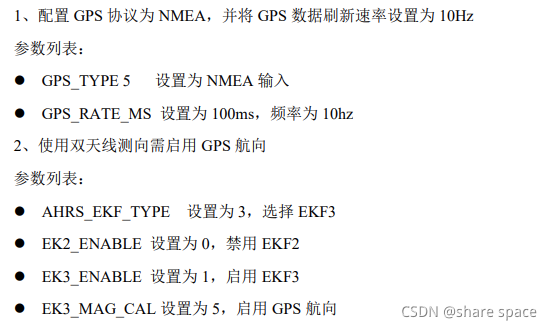
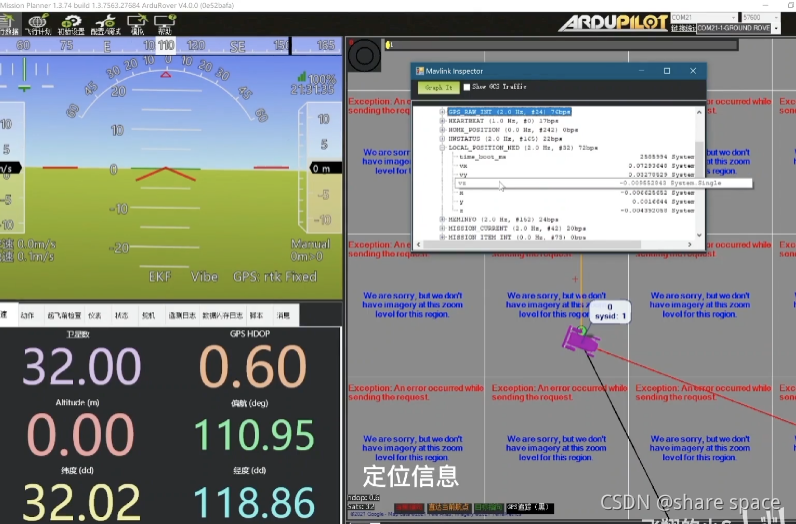
在淘宝搜索关键词PIXHAWK+双天线+GPS,经过一番筛选,选出了下表中3个厂家的3个设备,并进行了详细的技术参数对比。 经过精度和价格的考虑,笔者选择了性价比高的G-RTK。不选便宜的here3,首先here3不支持双天线测向功能,再者是因为我之前买过here3,进入RTK定位的时间非常长,有时候要10min以上,而且基站必须要接电脑,实际用起来我可不想每次都要带个电脑放在基站旁边。之所以没有选F9P的C-RTK是因为,我想使用双天线作为航向,用过pixhawk的模友应该很清楚,校准罗盘是非常痛苦的一件事情,如果用F9P的C-RTK需要使用2个移动端,这样就需要快9000了,所以综合考虑使用北力电子的G-RTK。 下完单后,卖家是顺丰发货,很快我就收到了货,拆开包裹,所有的东西如下: 我买的是G-RTK全套,大概东西有一个基站一个移动站,3个天线(基站一个天线移动站一个天线),基站安装架,配线等。安好的基站如下图所示: 贴一下G-RTK模块的细节实物图如下,G-RTK模块为航空铝合金CNC加工而成,整体手感较佳,金属外壳通过散热硅片和pcb板的主芯片连接,借助金属外壳,可充分散热。G-RTK用于安装的孔位个人比较喜欢,很多开源设备都没有留安装孔位,只能用3M胶去贴。 将G-RTK装在我的小车上,成品如下: 装好车后,我就进行了静态精度测试,这里卖家给的G-RTK性能如下: 本着实验时检验真理的唯一标准,我开始进行静态精度测试。Ardupilot固件使用G-RTK双天线需要配置如下图所示的参数: 这里有几种方法可以看定位精度,我这里采取的是打开mavlink inspector,观测LOCAL_POSITION_NED这个消息,这个消息是融合后坐标,单位是米,所以看是不是小数点后2位数字在跳动就知道是不是cm级别定位精度了。另一种简单快速的直观方法,在mp地面站上,把地图放到最大,看不到小车图标飘动。如果车在地图放大最大的情况下都基本是移动不懂就说明定位精度非常优秀了。经过多次静态精度测试,开阔地带稳定收星48颗,水平定位精度实测1cm,高程精度测试1.5cm,航向精度0.2度/1m基线。 整个静态测试视频链接如下: https://www.bilibili.com/video/BV1iV411j7M8/ 静态测试完,于是我就到了操场进行了,自动导航测试,首先测试走直线精度。如下图,对于一个标准的400m跑道,我选择了一个直线段,在起点、中间点、终点共打了3个点,经过车的控制参数调整,做到了自动导航全程,车始终稳稳可以压住跑到直线,实现了直线段的厘米级别压线精度。 直线自动导航测试视频如下: https://www.bilibili.com/video/BV1wM4y1u7jA 看直线跑的精度如此之高,我就想能不能绕整个跑道也完成厘米压线任务。说干就干,操场跑道完整一圈又很多弯道,于是为了保证打点的精度,我差不多花了半个小时,总共打了209个航点。当我切到自动模式,怀着激动的心情,小车真的全程没有离开过跑道线,在有弯道的情况下,实现了cm级别导航。 操场全程,测试视频链接如下: https://www.bilibili.com/video/BV1Bg411g7Sy/ 在我整个静态和自动导航测试过程中,G-RTK的双天线航向数据稳定,没有出现任何异常,定位数据非常优秀,期待以后他在我其它项目中能派上用场。





 整个静态测试视频链接如下:
整个静态测试视频链接如下:
