Pixhawk垂直起降参数
1、写在前面
本来想写个垂直起降手把手教你调试的,由于作者也没有太多的时间给大家拍照并现场调试,鉴于很多朋友问我里面的参数问题,干脆写点东西算了。
2、参数列表及解释
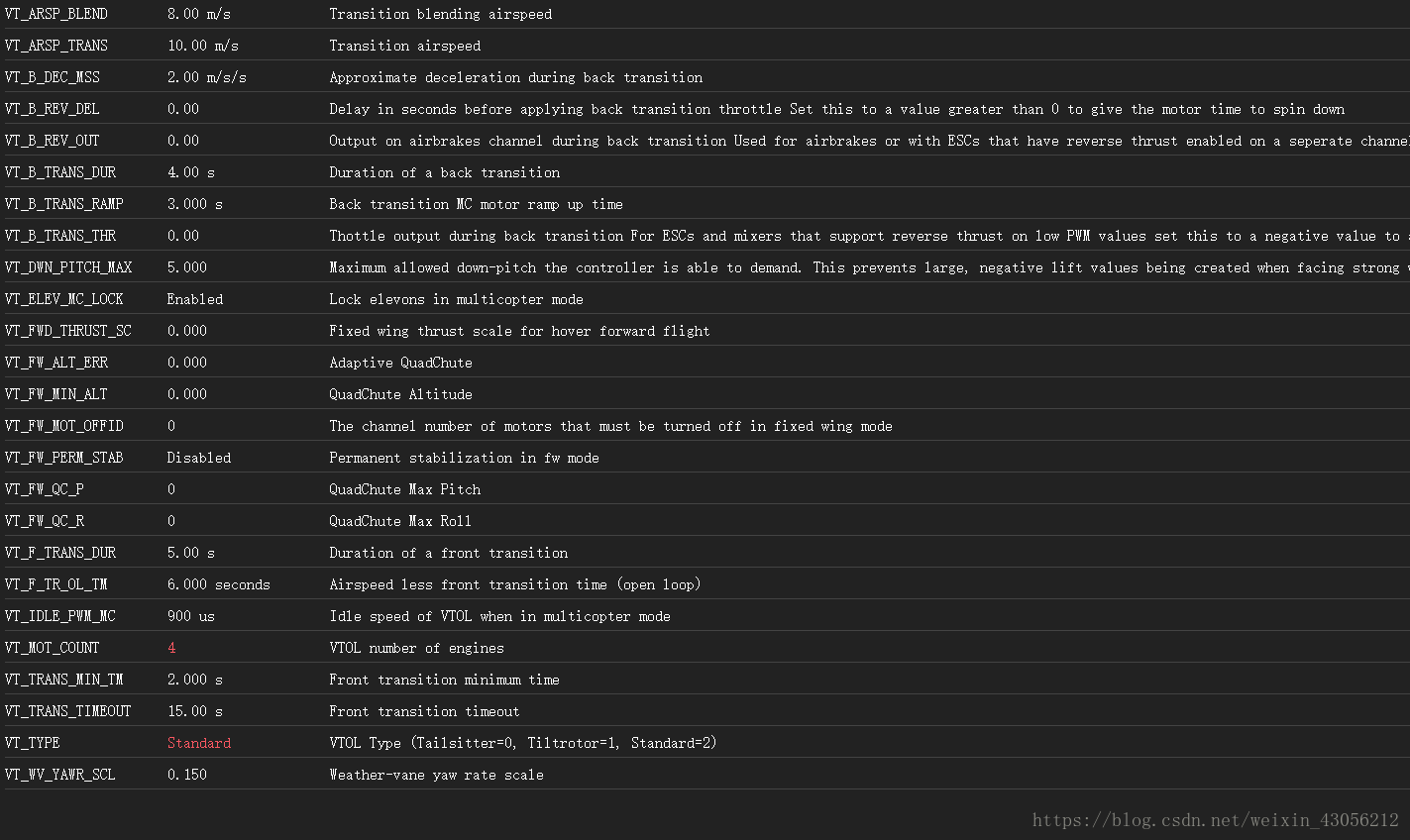
VT_ARSP_BLEND
这个参数的意思是,如果飞机在由旋翼状态转成固定翼状态的过程中,空速达到了这个参数设置的空速,那么旋翼的控制比重开始慢慢减少。也就是说在没有达到这个空速之前,旋翼的控制比重永远是1。
VT_ARSP_TRANS
这个参数就是转换空速了,意思就是达到这个空速,就完全是固定翼状态了。
VT_B_DEC_MSS
这个参数的意思是在固定翼状态转成旋翼状态的过程中的减速度。
VT_B_REV_DEL
这个参数的意思给那些具有反转功能电调用的,有些电机可以反转,这个参数就是设置个时间,让电机停下来。
VT_B_REV_OUT
这个参数是打开空中刹车功能,在固定翼转旋翼的时候,是跟上面那个参数一起使用的,可以反转刹车,让飞机尽快减速。
VT_B_TRANS_DUR
这个参数是设置后转换(固定翼转旋翼)的转换时间。
VT_B_TRANS_RAMP
这个参数就是在后转换的过程中,在此参数的设置时间内,让旋翼的控制比重慢慢加到最大。
VT_B_TRANS_THR
后转换过程中的,反向刹车油门,还是跟上面说的一样,你的电调要能支持反转。
VT_DWN_PITCH_MAX
这个参数是可以设置一个pitch角度,如果飞机在旋翼状态下前倾角度大于设置的这个角度的话,就开启固定翼的推力/拉力电机,这是保障飞机在大风中飞行的。
VT_ELEV_MC_LOCK
多轴模式下,是否锁定副翼。
VT_FWD_THRUST_SC
在多轴模式下,如果推杆,防止飞机出现较大的低头,可以打开固定翼的电机,帮助飞机进行前进,这个参数与上面VT_DWN_PITCH_MAX 参数配合使用。
VT_FW_ALT_ERR
可以理解为航线高度保护,如果在固定翼模式下,飞机的高度低于设置的这个高度了,就会触发飞机的四轴降落伞模式,转成旋翼,并且返航
VT_FW_MIN_ALT
如果飞机的高度低于这个高度了,飞机转成旋翼模式
VT_FW_MOT_OFFID
在固定翼模式下,可以关闭掉这个参数设置的伺服通道
VT_FW_PERM_STAB
这个参数字面意思是固定翼永久稳定,在旋翼模式的时候,如果不关闭这个参数的话,固定翼的控制舵面会根据姿态的变化进行调节
VT_FW_QC_P VT_FW_QC_R
这个参数是设置固定翼的角度保护的,如果在固定翼状态下,飞机的角度超过设置的这个角度,就会转成旋翼并且进入自动返航失效模式
VT_F_TRANS_DUR
前转换时间,就是由旋翼转成固定翼的时间
VT_F_TR_OL_TM
这是在前转换的过程中,没有空速传感器的反馈时间
VT_IDLE_PWM_MC
旋翼模式下的怠速
VT_MOT_COUNT
电机个数,从程序里面看,这个应该是指旋翼的电机个数
VT_TRANS_MIN_TM
前转换的最小时间
VT_TRANS_TIMEOUT
前转换的超时时间,超过了这个时间,就是转换失败,会变成旋翼
VT_TYPE
垂直起降的类型,有标准型(4+1类型)、尾座式坐地起降、倾转型
VT_WV_YAWR_SCL
风向标模式下,方位控制比例,也就是说,把方位控制弱化,让飞机的方位随着风转,不会强行怼着风
3、结尾
作者好久没有玩这个开源的控了,有几个参数是望文生义,要弄清楚它实际的意义,要结合程序来看。有些不合理的地方也要结合实际的飞行情况进行程序的修改。最近玩航模,做了一款小型的飞行器。欢迎大家加群探讨各种航模、无人机的发展、市场、技术问题。开源控给了这个行业很大的活力,我们也应该本着他的初衷,做出更便宜,更贴近市场的各种无人机、飞行器等,毕竟没有了基础研发费用。
QQ群:323525681
添加微信拉你入群 EzailPH3 (验证暗号:我要飞飞机)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)