一、软件安装
- 运行安装包
- 安装 USB 驱动
第 一 次 安 装 Motive 时 , 会 提 示 安 装 OptiTrack USB 驱 动 ( 例 如 :
OptiTrack_USB_Driver_x64)。安装此驱动程序,所有的 OptiTrack USB 设备都需要
安装此驱动程序(包括 Hardware Key)。驱动安装完成之后,继续安装 Motive。 - 按照安装提示安装 Motive 软件,建议在默认目录中安装 Motive 软件。 C:\ProgramFile\OptiTrack\Motive
- 安装完成
注意:电脑是否缺少必要的可再发行组件( .NET framework, Direct X, VC runtime),
安装 Motive 时会提示是否安装,请务必安装这些。在安装 Motive 时联网,软件会自动下
载;或者可以下载完安装包自行安装。
软件注册
1、在开始菜单 OptiTrack->License Tool,单击打开 License Tool。
2、然后按照提供的 License 信息填写,你需要填写订单发货中的 License Serial Number/ License Hash 以及 Hardware Key Serial Number。(必须联网注册激活,注册完成后可以离线使用)
3、点击激活。
二、标定 Calibration
与其他多相机测量系统类似,光学运动捕捉系统首先要进行标定才能够使用。在标定过程中, 系统通过捕获的图像计算每个相机的位置、 角度、以及畸变。 通过标定, Motive 构建 3D 捕获空间。 具体来说,通过观察多个同步相机的 2D 图像,关联到通过三角测量得到的每个相机已知的标定 Marker 的位置。 注意, 如果标定之后相机有任何变化, 需要重新进行标定。即便外部设置没有改变,随着时间的变化、 温度其他环境的波动,标定精度会下降,建议每天标定一次系统。
标定步骤
1、准备、 优化捕获设置;
2、 在相机预览窗口( Camera Preview) 中, 点击 清除现有的 Mask 区域;
3、 打开标定窗口,使用 Mask Visible 去除场地中不能移除的反光物体;
4、 采集标定采样点( Wanding);
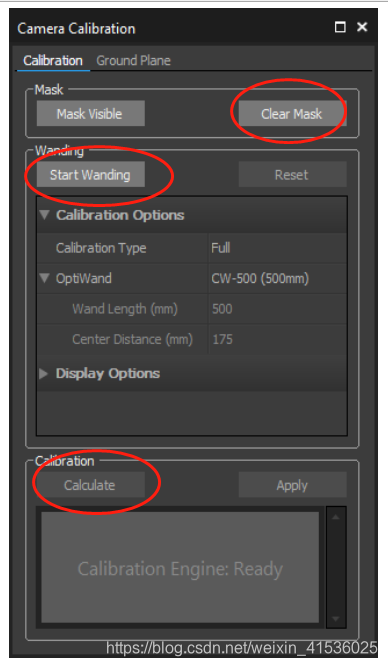
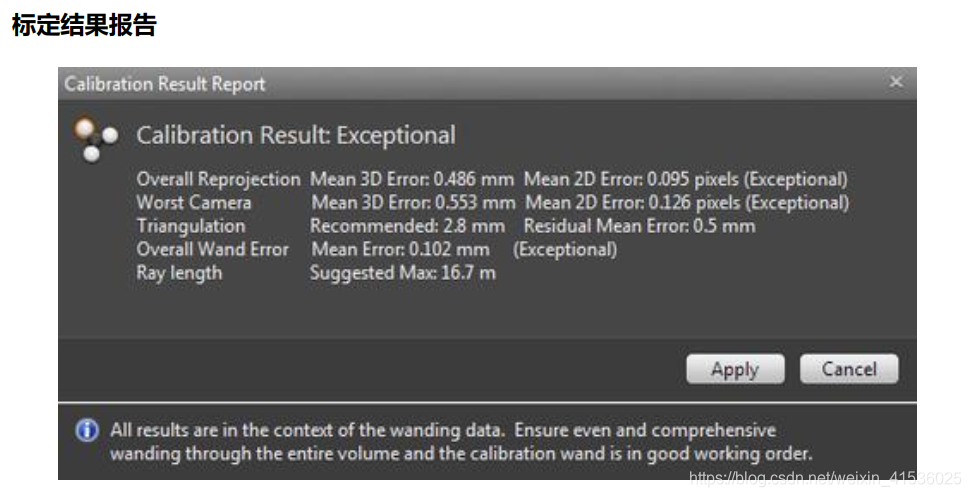
5、 计算、 检查标定结果;
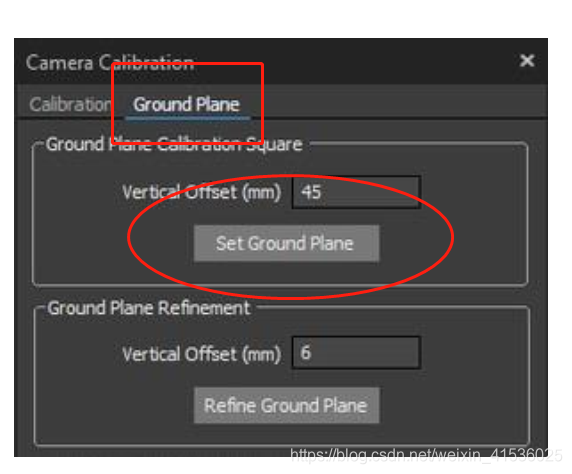
6、 放入L型标定杆,设置地面。
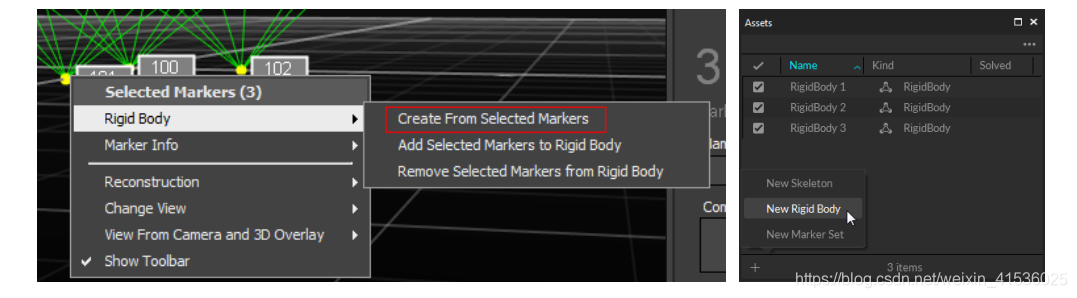
三、创建刚体
将所要创建模型的刚体贴好标记点,放置在标定好的场地内,在 Motive 的 3D 视图中框选住代表刚体模型的标记点。 然后点击右键选择 Rigid Body 下的 Create From Selected Markers;或者使用热键: Ctrl +T;或者在 Asset 窗口点击,选择 New Rigid Body。通过以上三种方式都可以对选中 Marker 点完成刚体创建。
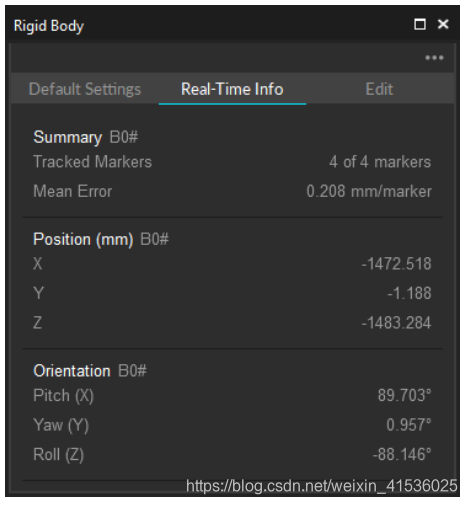
四、刚体跟踪
对于创建的刚体,由其枢轴点( Pivot Point)代表该刚体的位置和姿态。 当创建刚体时,其枢轴点将默认放置在其几何中心, 方向轴将与全局坐标轴对齐。
Rigid Body->Real-Time Info 窗口可以查看选中 Rigid Body 的实时信息, Rigid
Body 的位置信息是枢轴点相对于世界坐标系坐标轴原点的位置,姿态信息是相对于初始创建刚体坐标轴的变化。
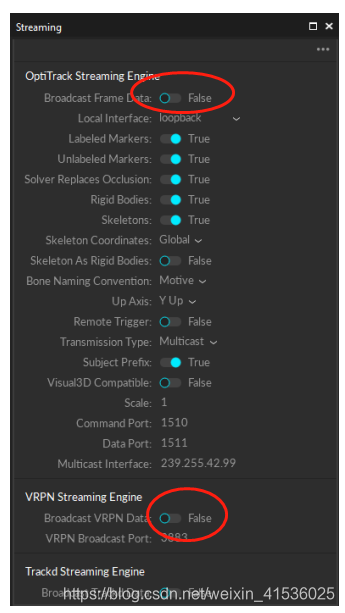
五、 Data Streaming
Motive 可以通过多种方式,将跟踪的数据 实 时 传 输 到 其 他 程 序 : Autodesk MotionBuilder、 Visual3D、 Unreal Engine 4、 3ds Max、 Maya (VCS)、 VRPN、 Trackd。Natnet SDK 支持用户创建自定义客户端用来接收数据,数据流选项不需要单独的许可证。常 见 的 运 动 捕 捉 应 用 依 赖 于 实 时 跟 踪 ,OptiTrack 系统旨在提供低延时的数据,Streaming 窗口中配置选定的服务器通过网络广播数据。 可通过 View 选项下 Data Streaming Pane
红色部分都要打开:
开始测试
ROS:kinetic
Ubuntu:虚拟机16.04
目的:通过Optitrack获得刚体(crazyflie2.0)的姿态信息,并传给ROS
1.vrpn及网络配置
cd ~/catkin_ws/src
git clone https://github.com/clearpathrobotics/vrpn_client_ros.git
sudo apt-get install ros-kinetic-vrpn
安装好之后
cd ~/catkin_ws
catkin_make
PING一下网络是否连通
ping 192.168.1.2
最后启动
roslaunch vrpn_client_ros sample.launch server:=192.168.1.2
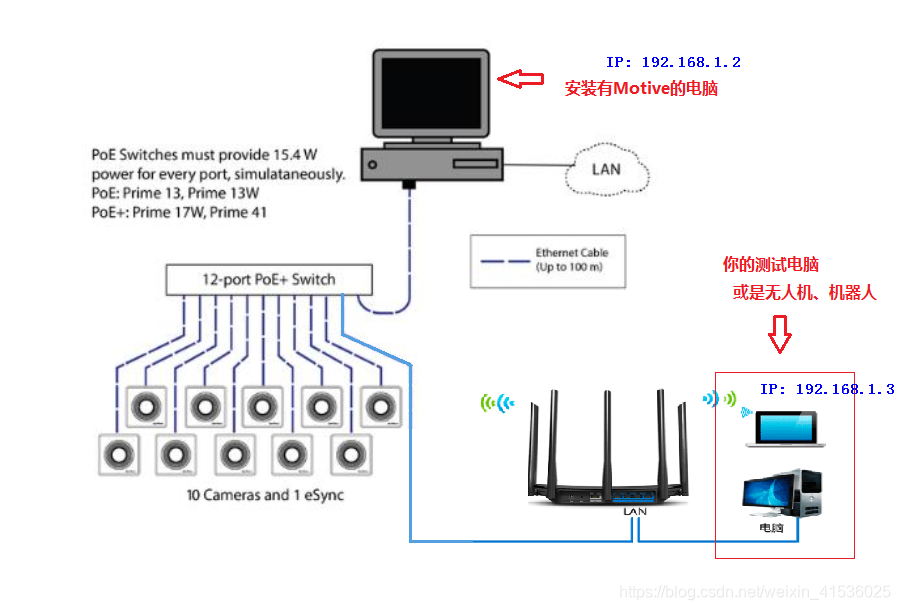
硬件连接与设置网络如下
总结,这个过程最重要的有两个地方,IP设置一定要对,防火墙一定要关。
ubuntu 14.04
https://blog.csdn.net/banzhuan133/article/details/78107422
http://www.gongkong.com/article/201507/59414.html
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)