感觉和这个类似 https://blog.csdn.net/sinat_16643223/article/details/118649889
是不是其实那些那么大的wifi数传板子本质和核心就是这个,一个ESP8266引出一个串口?

转载自:https://blog.csdn.net/qq_39610398/article/details/106238312
【PX4 飞控二次开发】自制ESP8266WIFI数传
weixin hh_200806 2020-05-20 16:33:50 2184 收藏 21
分类专栏: 【PX4 飞控二次开发】 文章标签: udp
版权
ESP8266数传模块
-
- 一、简介
- 二、下载烧录固件
-
- 1.下载MavLink ESP8266固件
- 2.烧录
- 三、连线
- 四、配置ESP8266
- 五、连接WIFI Bridge
一、简介
ESP8266是一款低成本,易于使用的Wi-Fi模块,具有完整的TCP / IP堆栈和微控制器功能。它可以与任何Pixhawk系列控制器一起使用,这里我用的是安信可的Node MCU模块。
此款WIFI数传模块适应于APM和PIX等飞控,可以用于手机、平板以及电脑连接飞控调参和设置。
模块采用2.4G Wifi 进行通信,因为wifi的特性,通信距离一般在二百米以内,并且和接收设备也有关,仅适应于近距离应用,长距离通信不建议使用wifi数传,长距离通信建议使用3DR数传。
产品自带内置天线,并且可以扩展外部天线,但是实测加装外部天线后通信距离也没有大幅度的提升。
户外拉锯大约为220米,使用小米平板2连接。因为受接收设备以及安装位置的关联,所以不保证每个人到手后都能用到220米。
兼容的电脑端地面站:Mission Planner、 QGC等。
兼容的手机端地面站:Tower、QGC、F-Tower等。
二、下载烧录固件
1.下载MavLink ESP8266固件
V 1.2.2

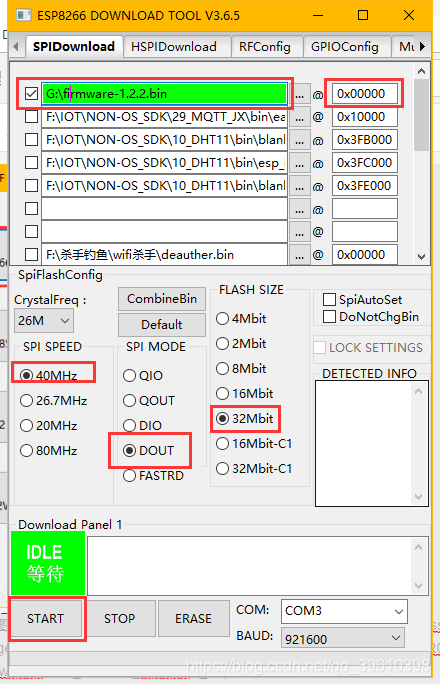
2.烧录
我这里使用的是安信可的工具 flash_download_tools_v3.6.5
配置好后 START下载
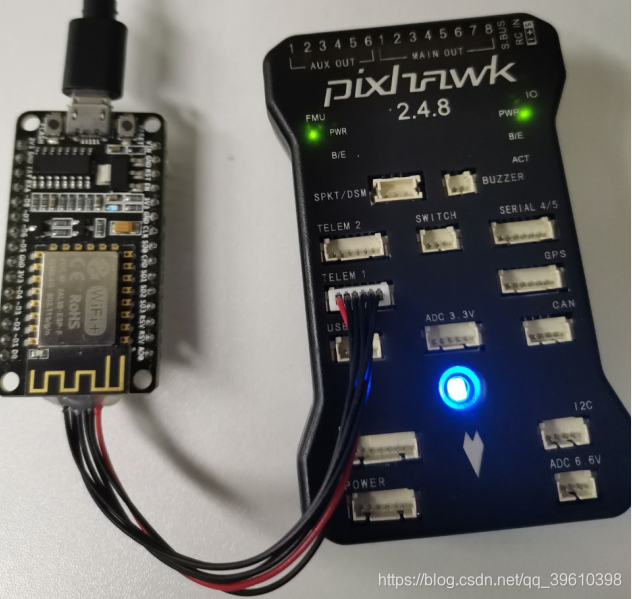
三、连线
这里使用的是数传接口TELEM1
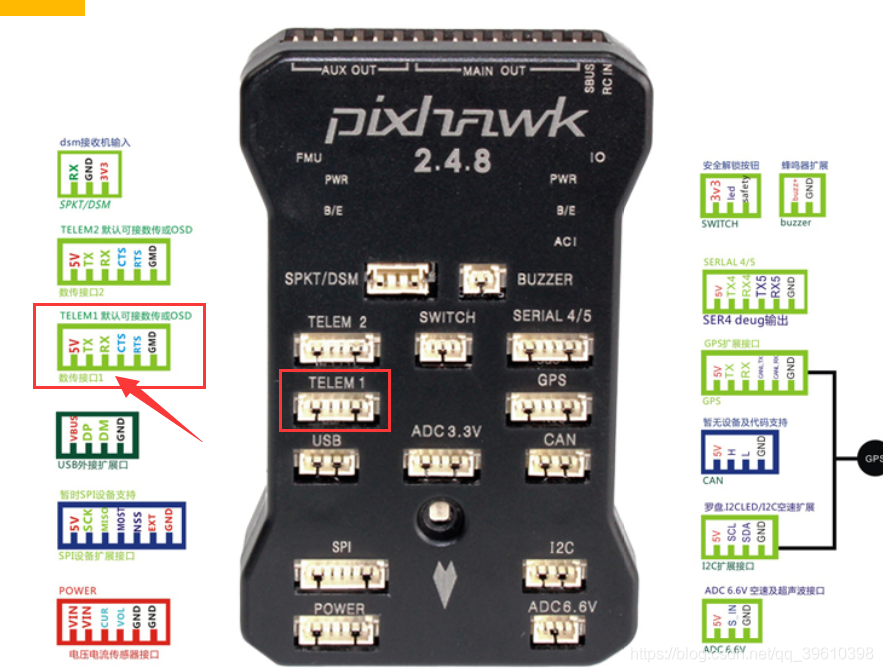
ESP8266-----------PX4
VIN-------------------5V
RX--------------------TX
TX--------------------RX
GND-----------------GND

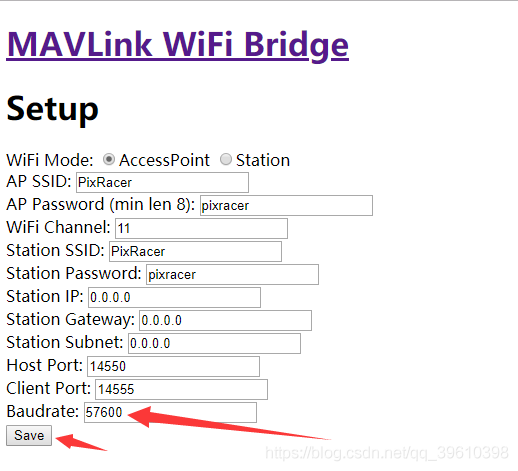
四、配置ESP8266
烧录固件后,ESP8266 AP有热点,连接Wifi
SSID:PixRacer
密 码:pixracer
打开网页进入:192.168.4.1

这里我们需要改一下波特率,TELEM1的默认波特率是57600
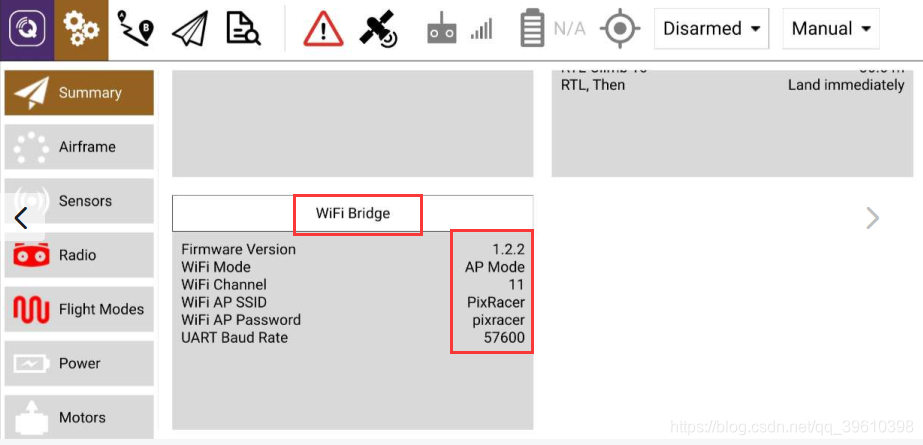
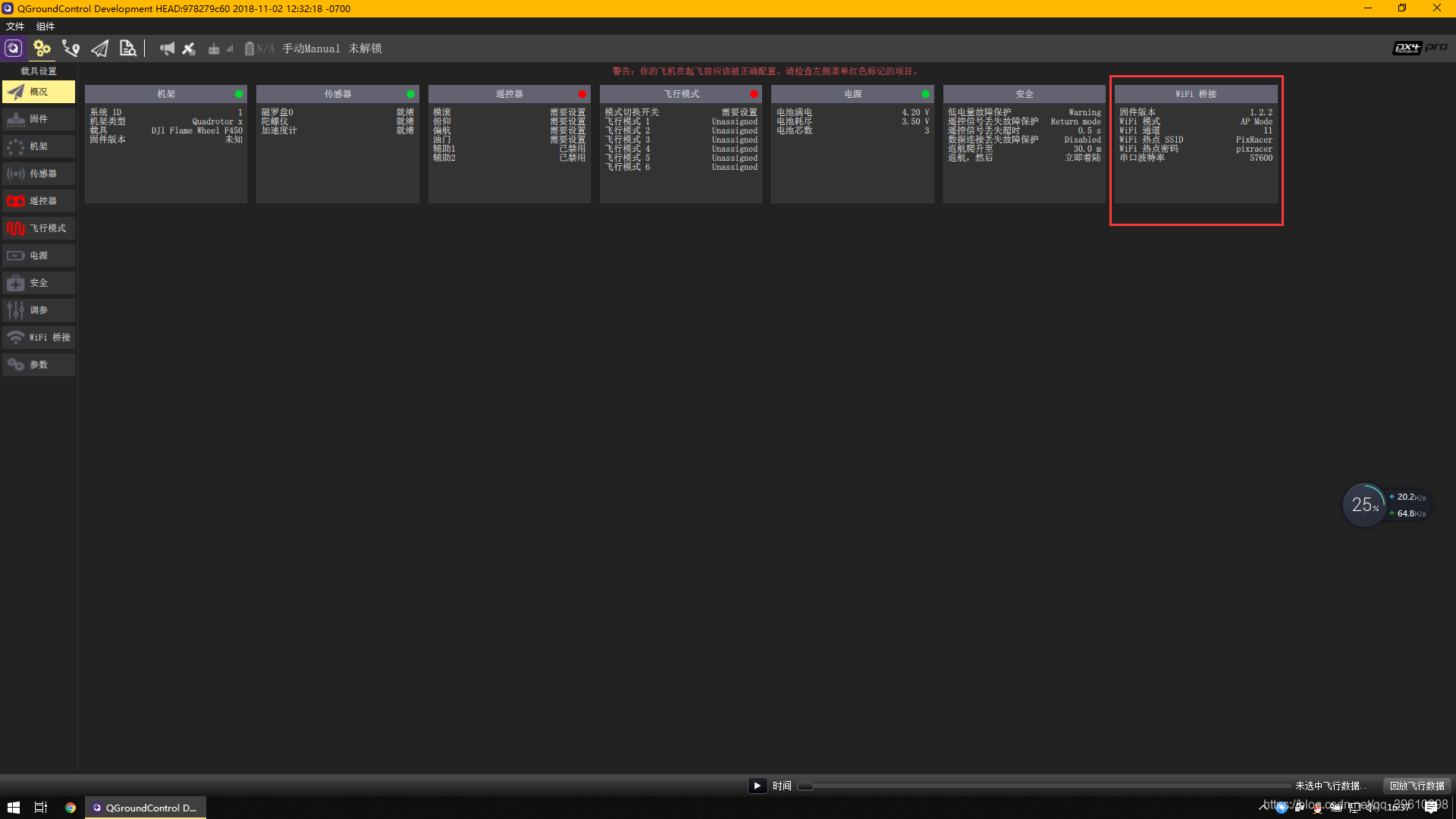
五、连接WIFI Bridge
手机连接WIFI热点 这里用的APP QGC
点开APP后就直接自动连接上了,MP地面站则需要手动连接 UDP方式
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)