这个看着似乎挺不错的
摘自:https://mp.weixin.qq.com/s/wZ4tRRFHww6yB5JszDWO2A
TSLAM室内自主定位方案
原创 凌拓智能 TBUS社区 9月7日

点击上方蓝字关注我们
TSLAM室内定位系统运用slam自主定位技术,在复杂环境下,无需依赖外部定位信号,也能为智能机器人提供可靠的定位信息和地图信息,可广泛运用在智能机器人(无人机、无人车、无人船)、工程测量等设备上,完成室内环境的测量、检测、监控、安防、巡逻等作业任务。

TSLAM从诞生到现在,经过数次精心优化设计以及多平台传感器融合,实现了稳定的定位控制套件。可使室内运维平台的可靠性、效率性、经济性优势发挥得淋漓尽致。


TSLAM优势


!多图预警 !

功能特性
TSLAM Features
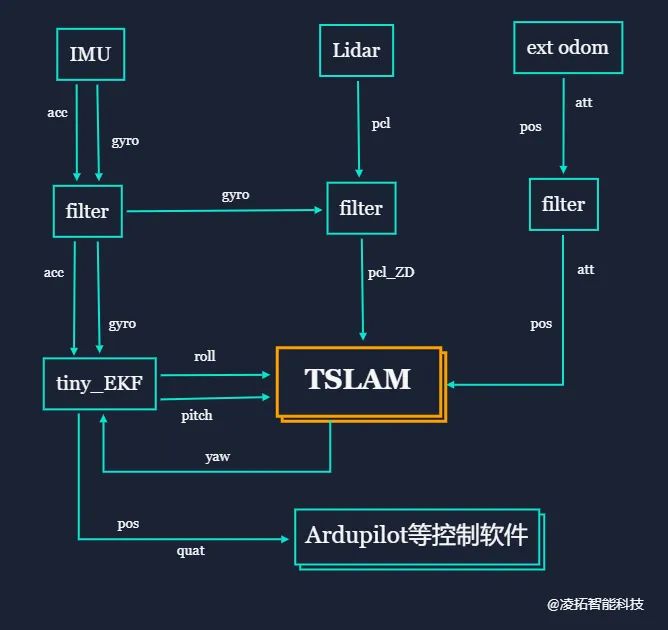
TSLAM室内定位技术采用激光定位技术,融合多种传感器,实现了在复杂环境下的全自主定位、实时建图功能,同时采用独有的卡尔曼滤波算法tiny_EKF,配合高精度imu实现室内厘米级定位,为实现路径规划等功能提供精准、可靠的位置信息。
1、厘米级定位精度

2、倾斜补偿,满足高速移动需求


3、实时栅格地图构建,为设备提供室内精准导航信息

4、多传感器融合定高,在地面高度突变的情形下,也能保证精准定高


5、3D激光纠偏,杜绝了由大机动造成的slam发散,slam模糊,地图变形问题


6、可支持航线规划,先建图,后定位,可根据已扫描地图设置航点飞行。支持地图保存、航点保存。

系统实现框架
TSLAM更新历程
TSLAM1.0
问世
TSLAM1.1
优化了代码质量,规范了函数变量命名,去除了很多含糊不清的表达
TSLAM2.0
1.重新定义构架,使用定位建图分离的模式进行slam,达到更小错误率。
2.重新设计了二值栅格,地图效果更好,发散更少
TSLAM3.0
1.全新设计了tiny_ekf滤波算法,使得tslam不依赖于任何第三方进程,保证可控
2.tiny_ekf适配高精度IMUadis16448,使得精确到厘米级的定位成为可能
3.定高不再单独依赖气压计,得益于tiny_ekf的出色发挥,融合了向下激光测距和气压计,气压计保证稳定,激光测距保证精确,使得地形突变丝毫不影响高度估计
4.重新设计了贝叶斯滤波器,建立的地图更好,激光帧匹配更准确
TSLAM4.0
1.全新增加了location_only模式,现在可以使用先建图后定位的模式增加定位稳定性,避免一些动态场景随机干扰导致的地图噪点较多的问题。使用开机全局匹配的方式获取初始位置与航向。
2.增加基于ADIS16448的激光雷达预处理纠偏功能,由于激光雷达使用编码器计算激光角度,只有在激光雷达底座处于静止状态时才能得到正确的极坐标深度,而无人机自身是可以偏航的,快速的偏航会导致激光帧失真。得益于ADIS16448的高精度陀螺仪,彻底解决了此问题,使无人机室内稳定的高速飞行高速偏航丝毫不影响定位与建图效果。
3.vnav_viewer地面站增加保存地图功能,地图可保存为bmp图片
4.vnav_viewer地面站增加计算面积功能,用户可以使用建立好的地图直接计算室内面积
TSLAM5.0
1.优化了tslam sdk中的参数保存代码,使得tslam sdk拥有无限扩展参数的能力
2.增加了tiny_ekf中对初始状态、初始协方差的精确估计。
3.对tslam的socket通讯完全重写,使用非阻塞socket进行地面站交互,保证了在网络连接不好的时候,依然不会对定位逻辑造成威胁,进一步保证了安全飞行。
TSLAM6.0
1.对激光雷达驱动进行重写,极坐标系深度精度提高大约1CM
2.彻底告别mavlink,使用共享内存的方式将当前tiny_ekf状态变量写入ardupilot,完美保证了实时稳定。
3.对tiny_ekf所有参数进行了精调,使得定位更准确,更不容易发散,更实时。
4.对向下激光测距tf 进行了驱动重写,去除了一些无效数据与错误数据。
TSLAM7.0
tslam7重写了tslam sdk激光点云获取接口函数,使得函数能够支持3D无结构点云。让3维测距设备能够得到tslam支持。(如3D激光雷达,3D tof广角摄像头等设备,双目视觉深度相机等)
只要能获取到3维点云的设备,都能够使用tslamsdk进行同步建图与定位。
另,得益于支持3D点云,使得单线激光雷达也能通过精准的imu进行真正的3D激光纠偏,彻底杜绝了由大机动造成的slam发散,slam模糊,地图变厚等等问题。
技术咨询与合作
请扫描以下二维码了解:

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)