这篇很好地引入介绍了ADRC
https://zhuanlan.zhihu.com/p/151342543?from_voters_page=true
从零开始搭建无人机控制系统(一)——反馈与闭环

遥远的乌托邦
欢迎关注公众号“遥远的乌托邦“。
前言
有人说控制是一门玄学,有时候,通过修改一个参数就能大幅提高控制性能,有时候又死活调不出理想的效果;也有人说控制是一门艺术,它的实现机理充斥着数学之美。它是一门将理论与工程完美结合的学科。
本专题将从零开始,带着各位读者,理一理无人机控制系统的那些事。
控制的本质是对信号的操纵,即在理解信号特性的基础上,对其进行一定的改造,使其达到人为设定的目标。这个目标可能是某种特定的数值,也可能是一定的数值范围或是一组约束条件等等。
这是我认为的广义上的控制。事实上,控制应该归属于信号处理领域的一个分支。控制领域对于系统的分析方法,大多数也可以用信号处理理论来解释。
闭环系统与开环系统
何为反馈?
在讨论开环与闭环系统之前,我们先来看看反馈的概念——将系统的输出信号返回至输入端,并以某种形式改变输入,它们之间存在因果关系的回路即为反馈回路,从输出返回至输入的信号即为反馈信号。
这样描述可能有一点抽象,下面以简图来表示:
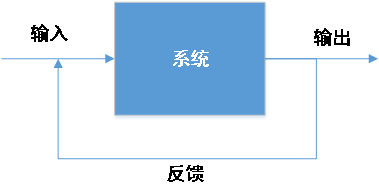
任意系统与外界交互的表现均可用上述图来简化,以电机为例,输入即输入信号,如转速指令;输出即输出信号,如实际转速;反馈即反馈信号,这里为实际转速的采样信号。
上图中的系统组成了最简单的反馈系统,而反馈又分为负反馈与正反馈。
负反馈使输出起到与输入相反的作用,使系统输出与系统目标的误差减小,系统趋于稳定;正反馈使输出起到与输入相似的作用,使系统偏差不断增大,使系统振荡。
很显然,我们希望被控对象的输出逐渐趋近于我们的设定目标,即误差逐渐缩小,而不是发散,因此,控制领域研究的反馈主要指的是负反馈。
闭环与开环系统的区别
回过头来说说闭环与开环系统。
开环系统即输入信号不受输出信号影响的系统,也可以简单的理解成没有反馈的系统,如下图所示。

开环系统的输入信号直接影响系统的输出,不与输出信号的反馈组成因果回路,是最容易理解的控制系统。
反之,很容易理解,拥有反馈环节的系统即为闭环系统。
闭环与开环系统的优劣势及应用
开环系统的结构简单,通常用于被控对象扰动模型已知且可补偿的情况,或对控制系统的控制精度要求不高时使用。
在工程上,开环系统的性价比较高。它不需要复杂的反馈环节,这意味着不需要采用昂贵的传感器对输出信号进行测量,只需要确定输入输出信号的数学关系、确定扰动因素的补偿关系即可。
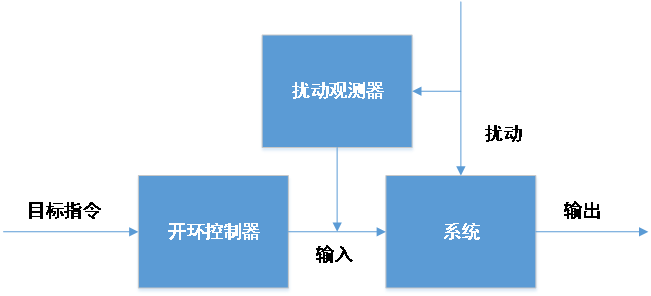
实际工程中,开环系统往往需要准确测量或估算扰动量(这里的扰动既包括系统工作时受到的外界干扰,如摩擦力;也包括系统内部的扰动,如系统未建模动态),对其进行前馈补偿,这样才能得到较高的控制精度与抗扰性能,而不至于外界扰动变化就使得系统发散(这里的系统包含执行器与被控对象,控制器的输出信号即为系统的输入信号,为避免引起歧义,这里特做说明,下文不再赘述)。
开环控制系统最经典的应用如Bang-Bang控制算法以及部分简单的温控系统。
闭环系统则相对复杂,换句话说,相对而言,它没有开环系统那么“经济”。首先,闭环系统相对开环系统多了反馈环节,我们需要采用传感器对输出信号进行测量,然后才能形成反馈回路。
其次,闭环系统需要在系统输入之前增加控制器部分。它根据系统的目标指令与反馈信号,根据预先设定的控制律,计算出一组使得目标与反馈信号误差逐渐缩小的输入信号,对系统进行闭环控制。最经典的PID控制算法即是下图的控制结构。
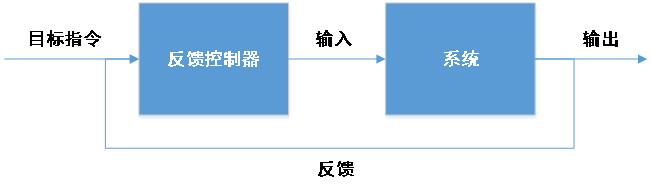
仅仅采用反馈控制器对系统进行闭环控制,能够在理想情况下达到预期的控制性能。然而,这样的控制结构忽略了扰动对于系统的影响,控制系统的抗扰性能无法保证,工程师们往往通过不断调整参数来使控制系统的性能与抗扰性取得一个折中值。
显然,这不是一个最优的控制结构。由此,工程师们又想出了另一种优化的控制结构。
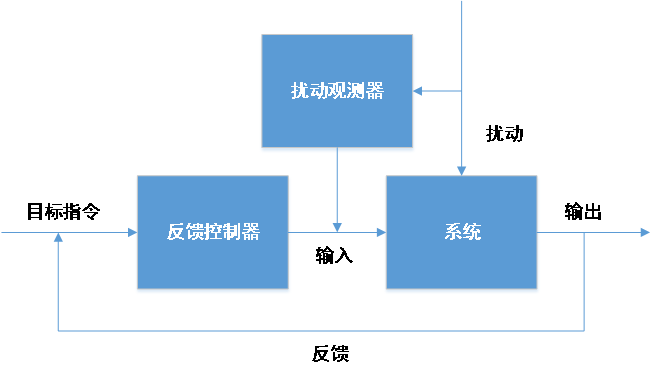
这种控制结构在经典的开环控制系统基础上,将开环控制器替换为反馈控制器,如此,既能保证控制系统的控制精度,又能兼顾控制系统的抗扰性。
这种控制结构最经典的应用即ADRC(自抗扰控制算法)。然而,扰动观测器的设计是十分有难度的。对于工况复杂的对象而言(如无人机),设计一个全局最优的扰动观测器是一个非常有难度的课题。
复杂的业务指标如何兼顾?
实际工程中,我们往往会接到各种各样的控制指标需求。对于单一的业务指标而言,我们可以很容易对其进行数学描述。
这里还是以电机为例,假如我们想要让电机工作在某一个转速,那么他的目标指令就是转速指令,这是非常容易理解且易于工程实现的。
那么,如果我们想要让电机工作在某一转速的前提下,工作温度不超过50摄氏度,且工作电流不大于20安培呢?这样的目标指令该如何描述?控制器该如何设计?
这其实是一个比较现实且复杂的控制问题,它的目标指令并不是由单一的指标组成,而是一组目标指令的集合,且很可能涉及到多个反馈回路。
对于这一类问题,学者们又提出另一种控制结构。
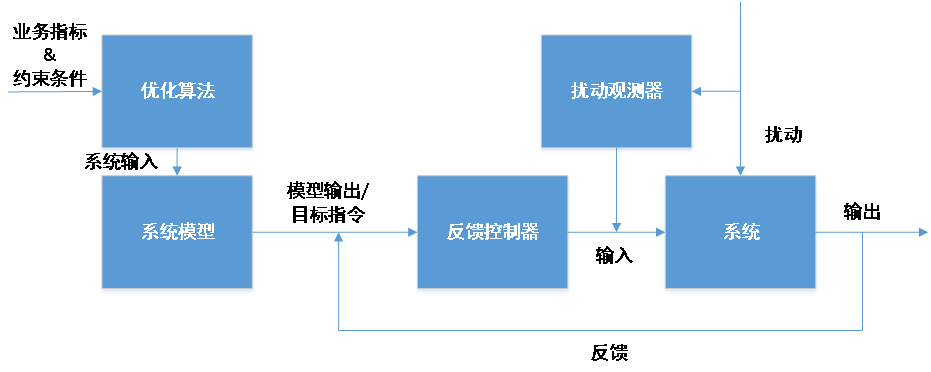
对于复杂的业务目标,我们首先需要对其进行分解,根据被控对象的系统模型将其分解为可被解析表达的数学形式,这些表达式可能是等式约束(如上文提到的工作在某一转速),也可能是不等式约束(如上文提到的工作温度不超过50摄氏度,工作电流不超过20安培)
其次,我们需要针对这些约束条件以及系统模型,设计对应的优化算法(常见的如线性规划、二次规划等)。通过优化算法得到一系列全局最优的系统输入,再次根据系统模型计算出对应的模型输出。
最后,将模型输出(即控制器的目标指令)输入反馈控制器进行闭环控制。
这种控制结构层次分明,对于复杂的业务指标,优化算法可以根据用户对于不同指标的倾向性(通常在不同约束条件之前施加一定的权值),结合系统模型,计算出全局最优的目标指令。
那么,在得到一系列目标指令后,每一层级的控制器(如转速有转速控制回路,温度有温度控制回路,电流有电流控制回路)只需要关心如何达到各自的目标指令即可。
很多现代控制算法均采用类似的控制结构,如自适应控制,LQR(线性二次型控制)等等。
这种控制结构实质上是一种控制控制器的控制结构(听起来有点拗口),它需要对被控对象的模型有准确的建模。
总结
本篇围绕反馈、闭环与开环系统展开,从感性的角度介绍了它们与控制之间的联系。对于无人机控制系统而言,大多数控制结构逃不出上述的范围,至于如何针对不同的状态设计对应控制器是实际的工程问题,也是一门艺术。
下一篇将从数学角度来详解控制系统及其常用数值分析方法与技巧。
作者简介: 一个被Coding耽误的无人机算法工程师,控制、导航略懂一二,热衷技术,喜欢乒乓、音乐、电影,欢迎交流。
知乎: @遥远的乌托邦
GitHub: https://github.com/DistantUtopia
微信公众号: @遥远的乌托邦
http://weixin.qq.com/r/Yh2FnSPExn65rWf_90hw (二维码自动识别)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)