提示:无速度传感器永磁同步电机电机自适应自抗扰控制策略,在2022年10月12日晚上23:00写完的 人生的路真的很难走,身边也发生了很多不好的事情,关于一些研究成果和simulink代码生成也会拖延,希望大家原谅。
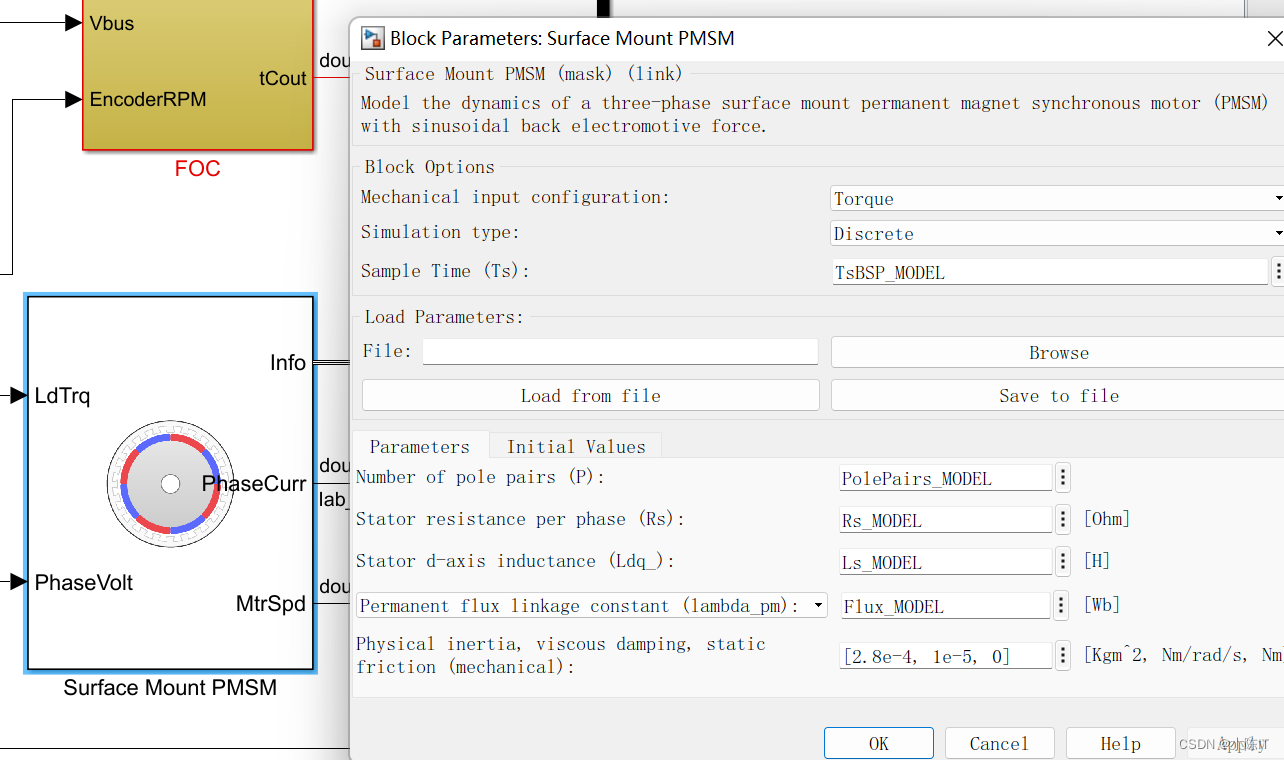
但是我想说一句哈,这里的控制是id=0控制,图上的那一块不用管,就直接给0就行
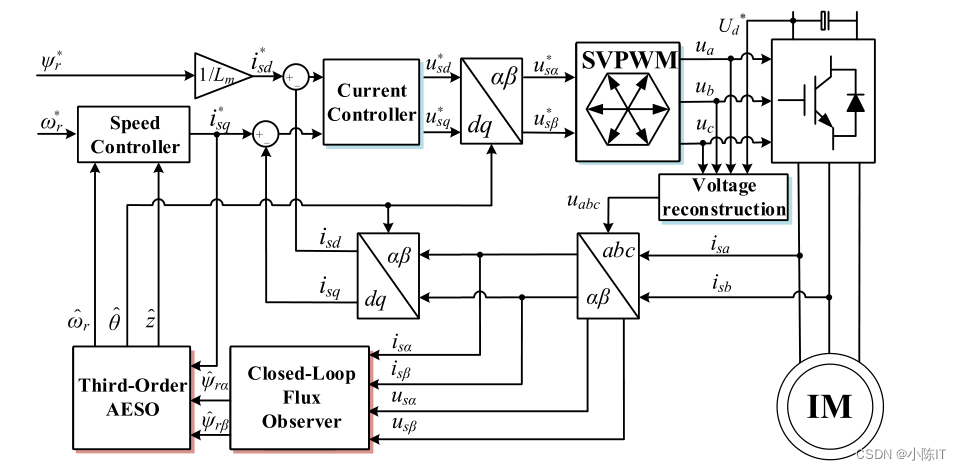
一、基于扩展状态观测器(ESO)的永磁同步电机无速度传感器控制因其令人满意的估计性能和对干扰的高鲁棒性而受到广泛关注。 然而,传统的ESO通常使用固定的高增益来实现快速收敛。这可能会引起人们对噪声敏感性的关注。此外,异步电机无速度传感器控制多采用比例积分(PI)型速度控制器,这可能导致系统动力学不理想。针对这些问题,提出了一种无速度传感器永磁同步电机自适应自抗扰控制策略。该方案首先采用三阶自适应ESO (AESO)算法对速度、相位和整体扰动进行估计。然后,设计了一种基于状态误差反馈控制率(SEFCR)的速度控制器,以提高系统的动态性能。在实际应用中,像直流偏置这样的干扰可能会进一步挑战估计性能,因此,采用闭环磁链观测器(CLFO)来处理这一问题。此外,还对CLFO进行了参数灵敏度分析,以评估所提方案的性能。
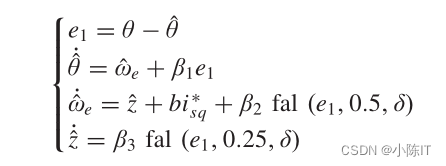
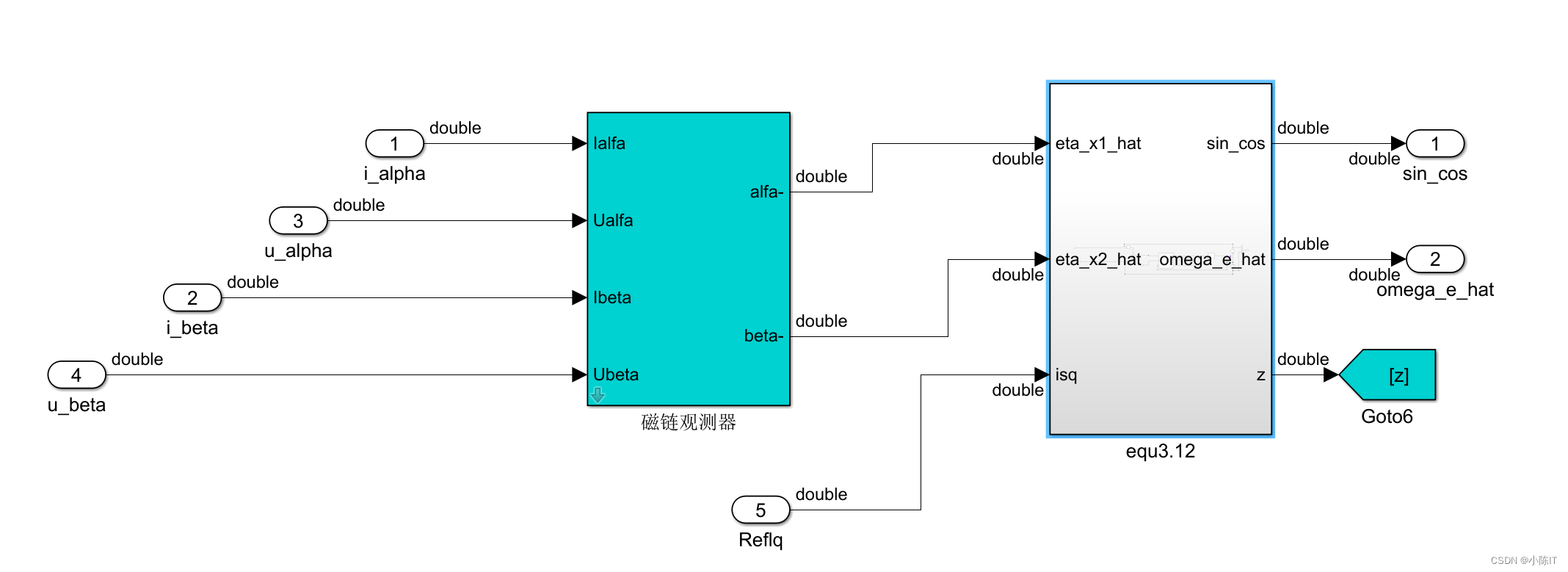
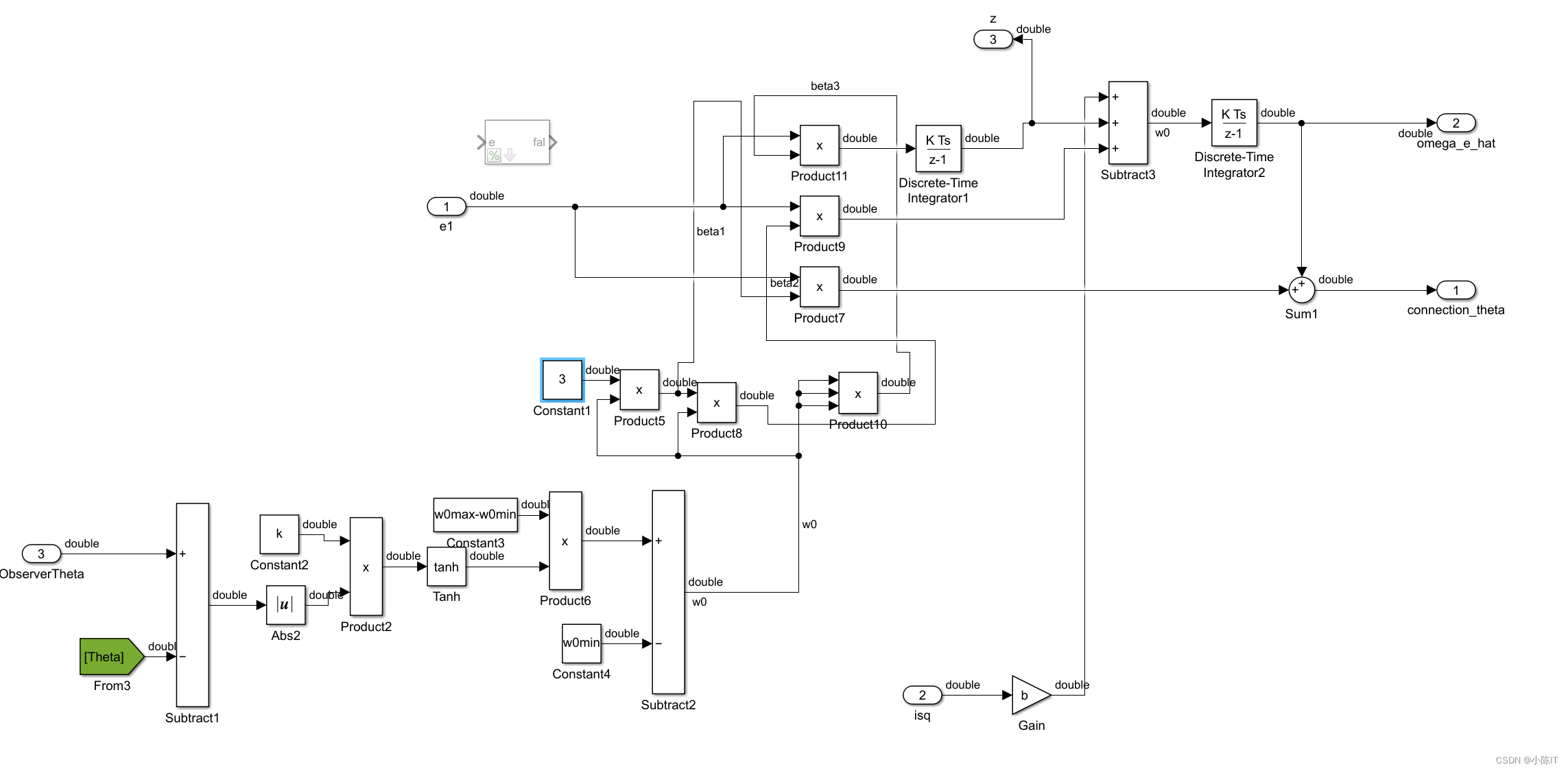
二、说白了就是无感控制,控制观测器为磁链控制,磁链接了一个三阶非线性ESO,并且增益β1、β2、β3是根据自适应得到的。并且这个三阶非线性ESO接的是速度环,对速度环进行了改进。
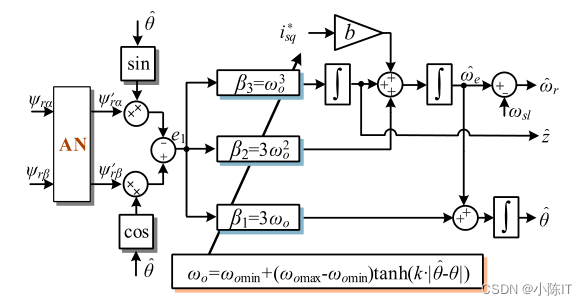
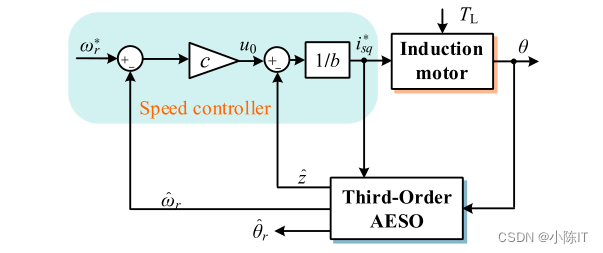
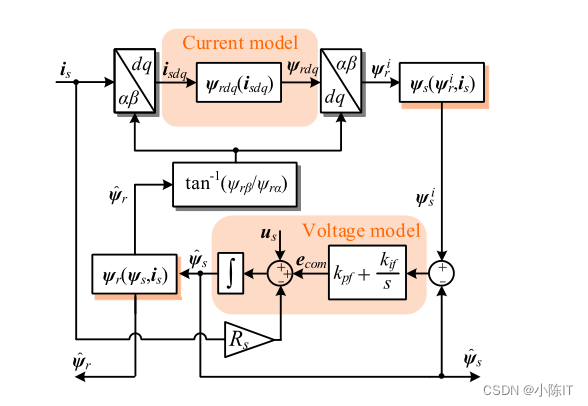
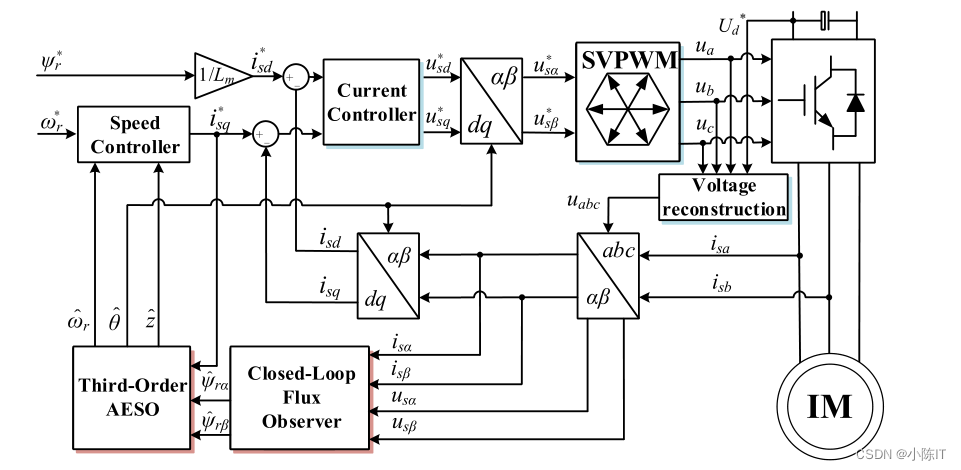
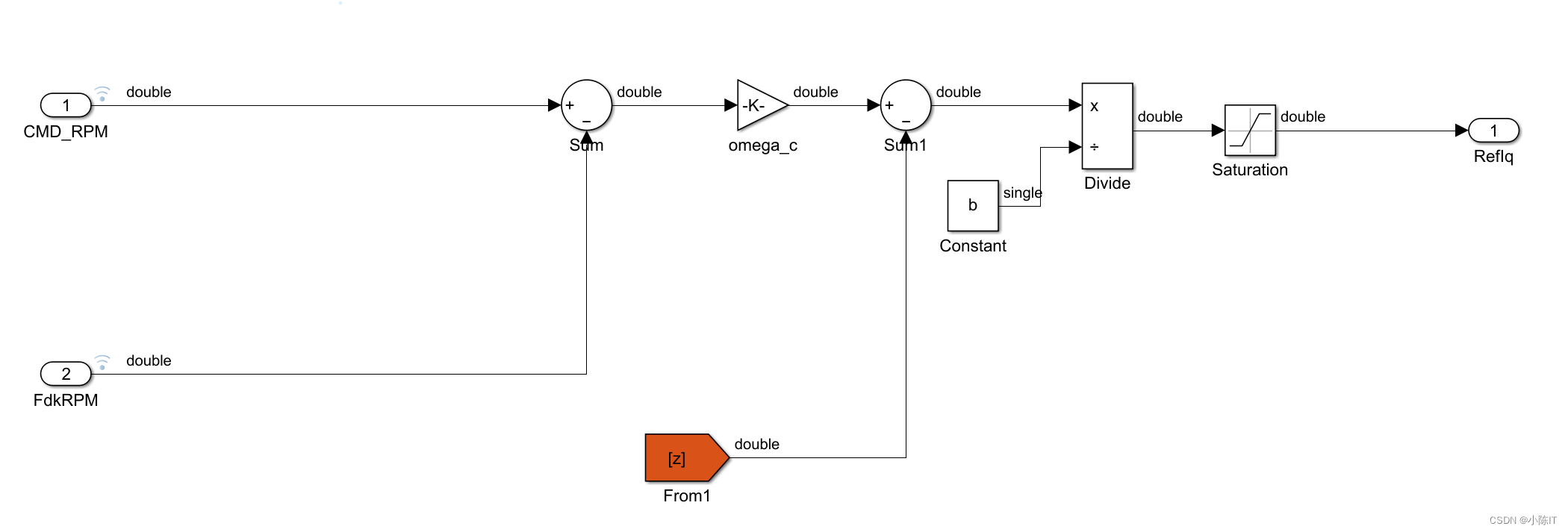
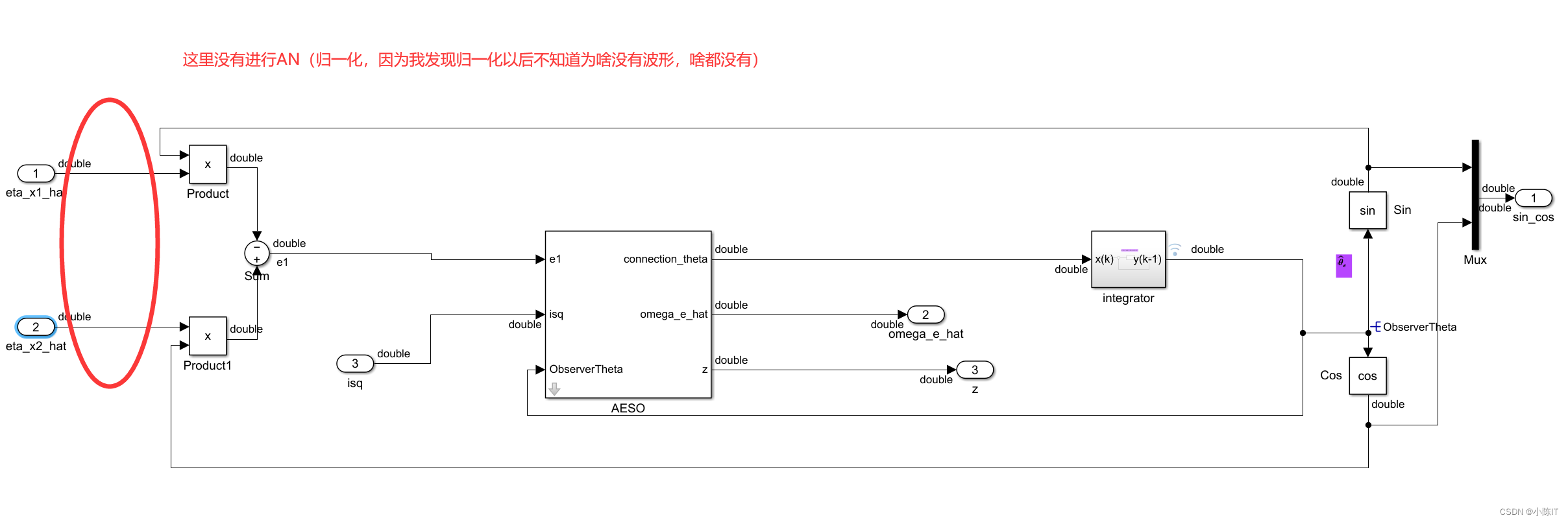
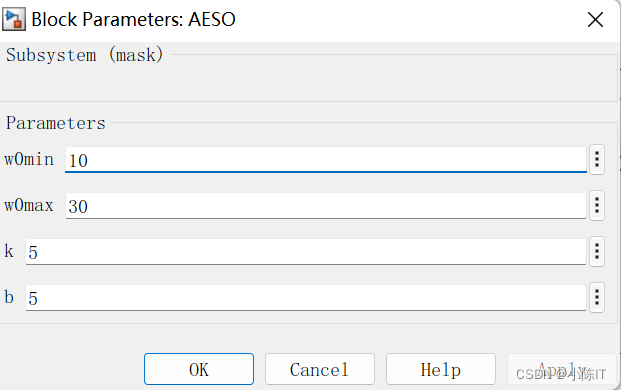
三、由于我是在FOC算法上搭建的,所以模型是一层一层深入的,没有整体那种,还请好好观看,此外,参数请认真看,每次都有同学在评论区下面要模型参数。 四、控制框图架构: 这里的w0min和w0max得根据自己的电机功率适当调,因为我的电机是几千瓦小电机,所以也就是几十,自己不想调的话那就画出这个ESO的传递函数,根据传递函数画出伯德图,给定不同频率得到动态性能和抗扰性能的折中值。 这里的输入是根据磁链观测器的输出得到的。AN是归一化,举个例子就是a的绝对值处于根号下(a的平方+b的平方),b也是, 这是速度环估计的控制框图,只需看蓝框框里面 这是磁链观测器控制框图 这是整体的控制框图
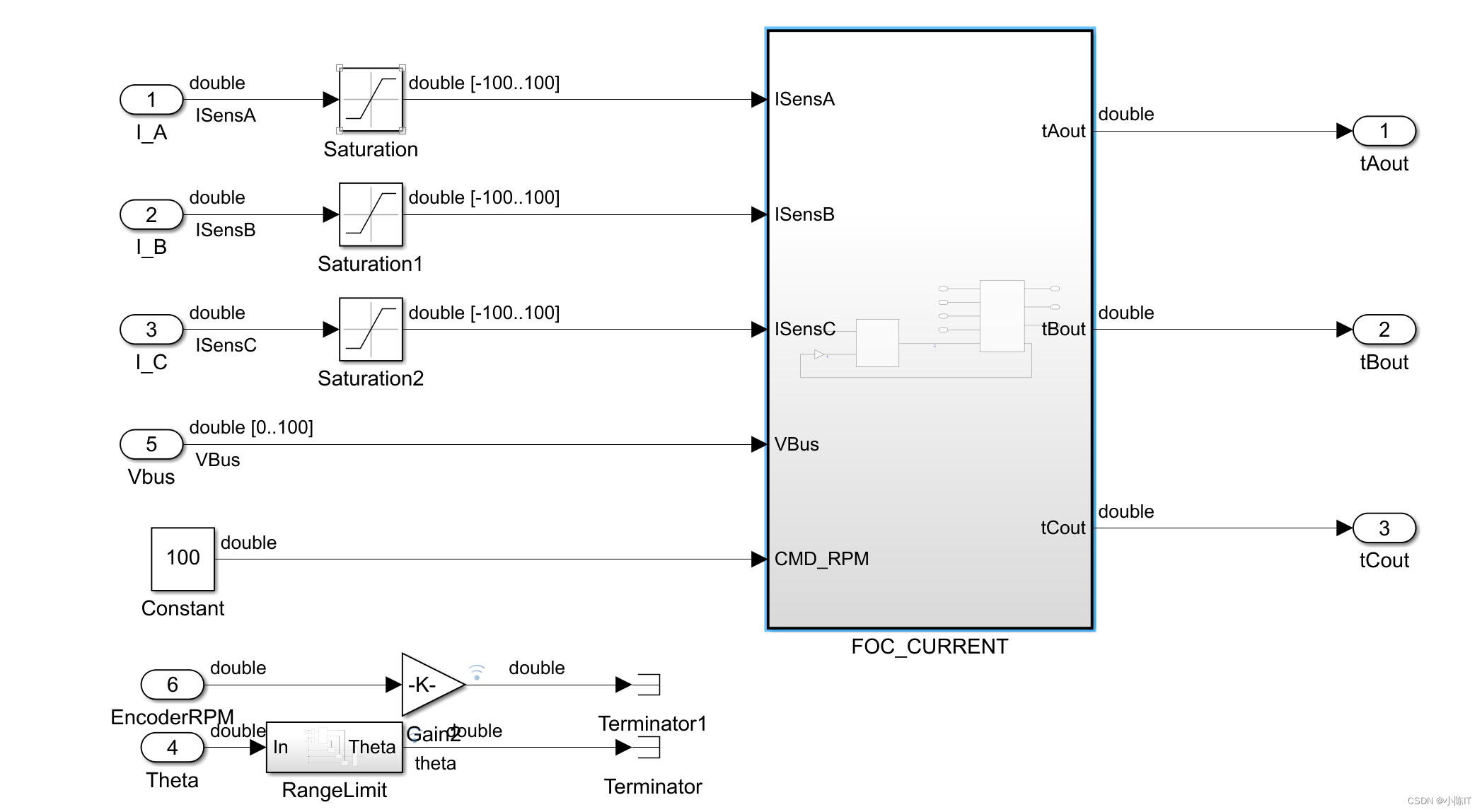
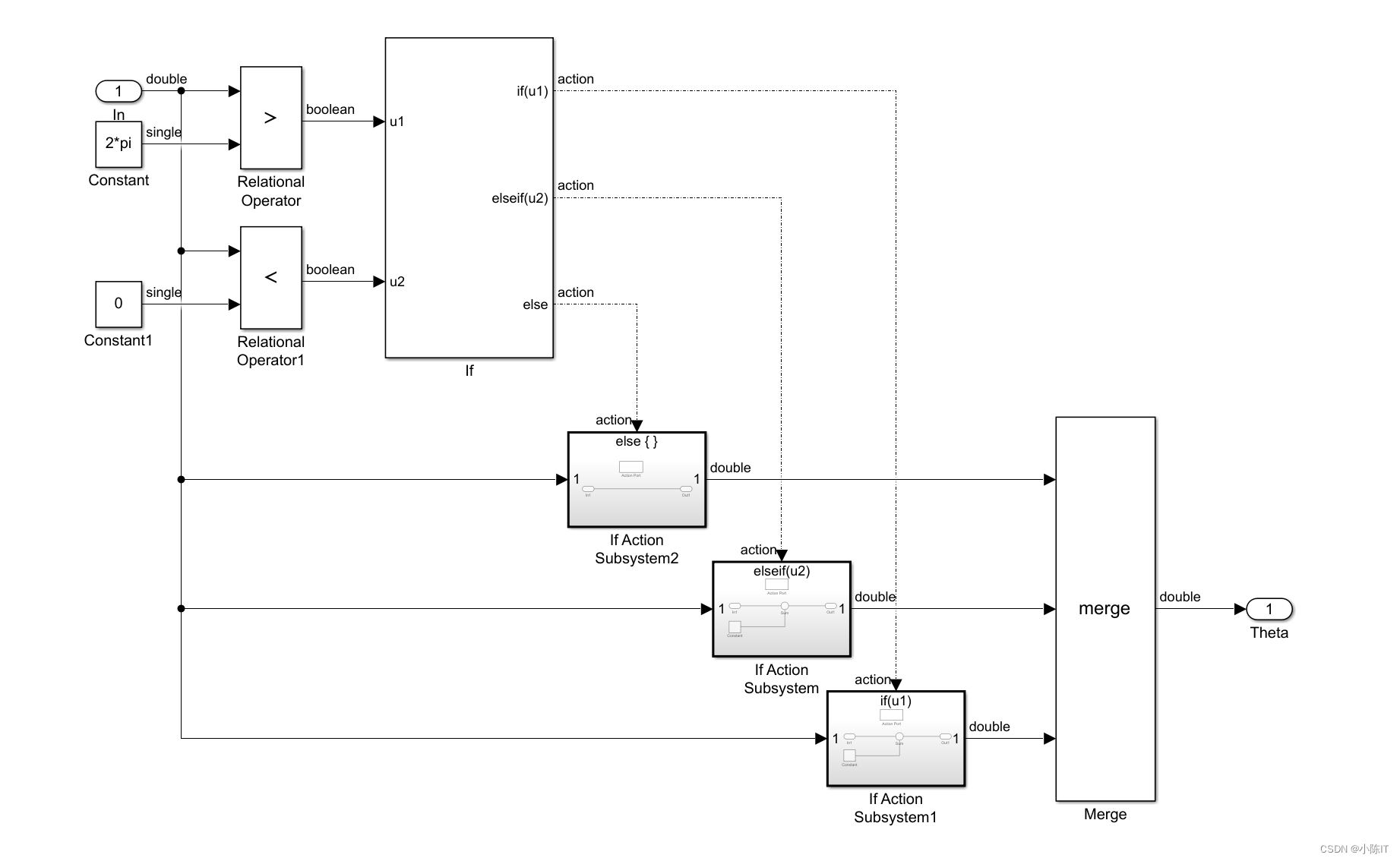
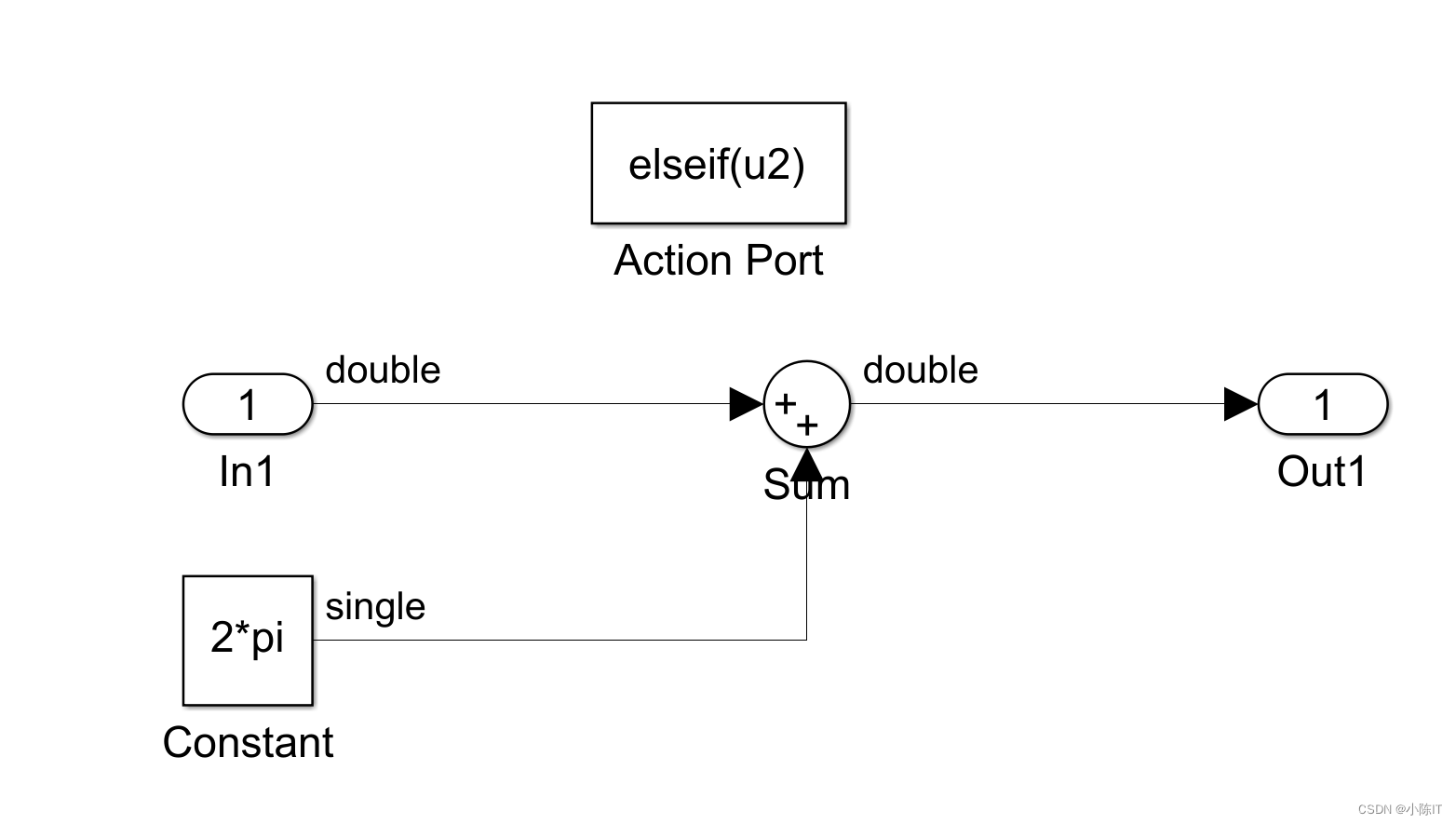
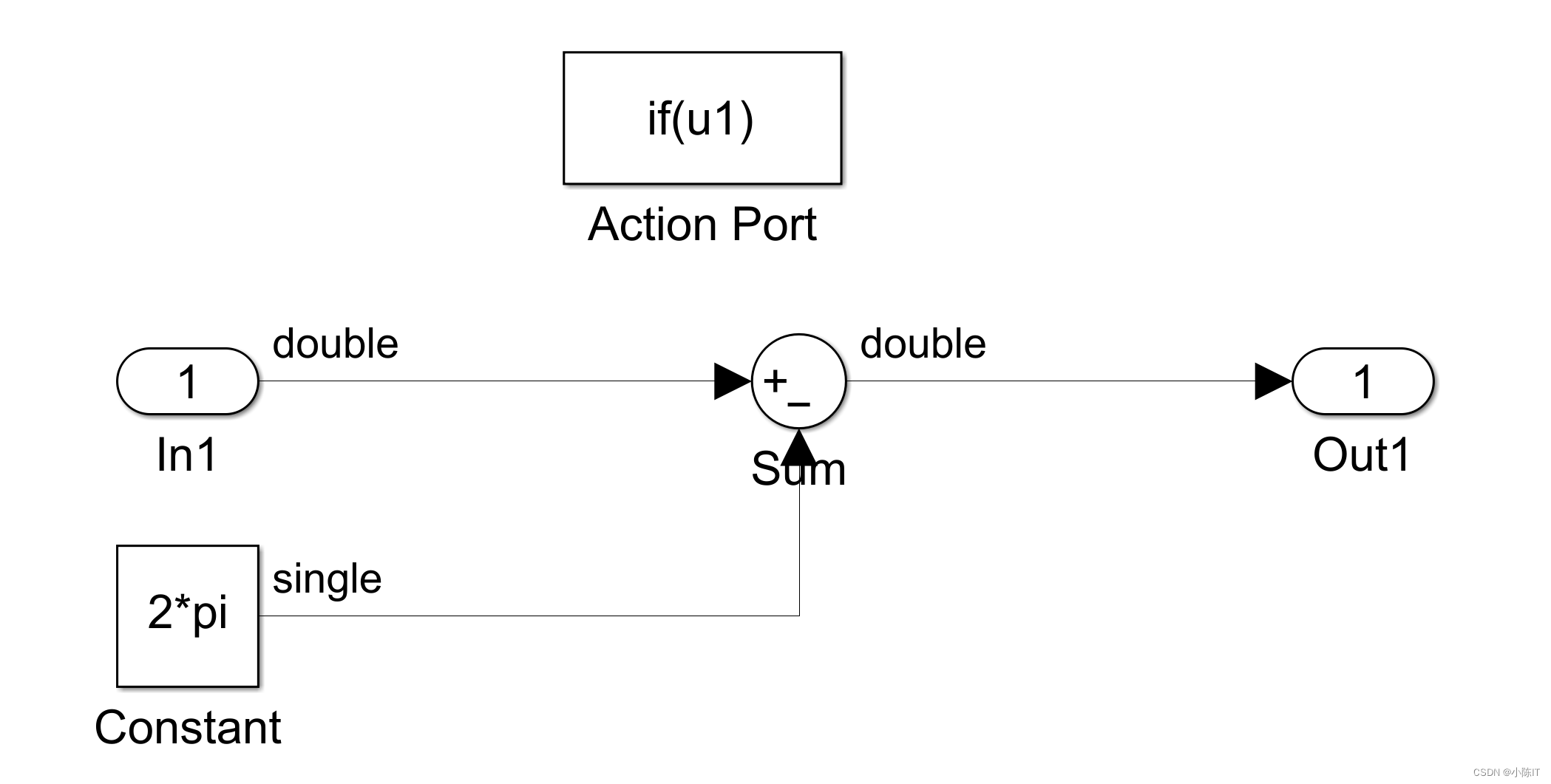
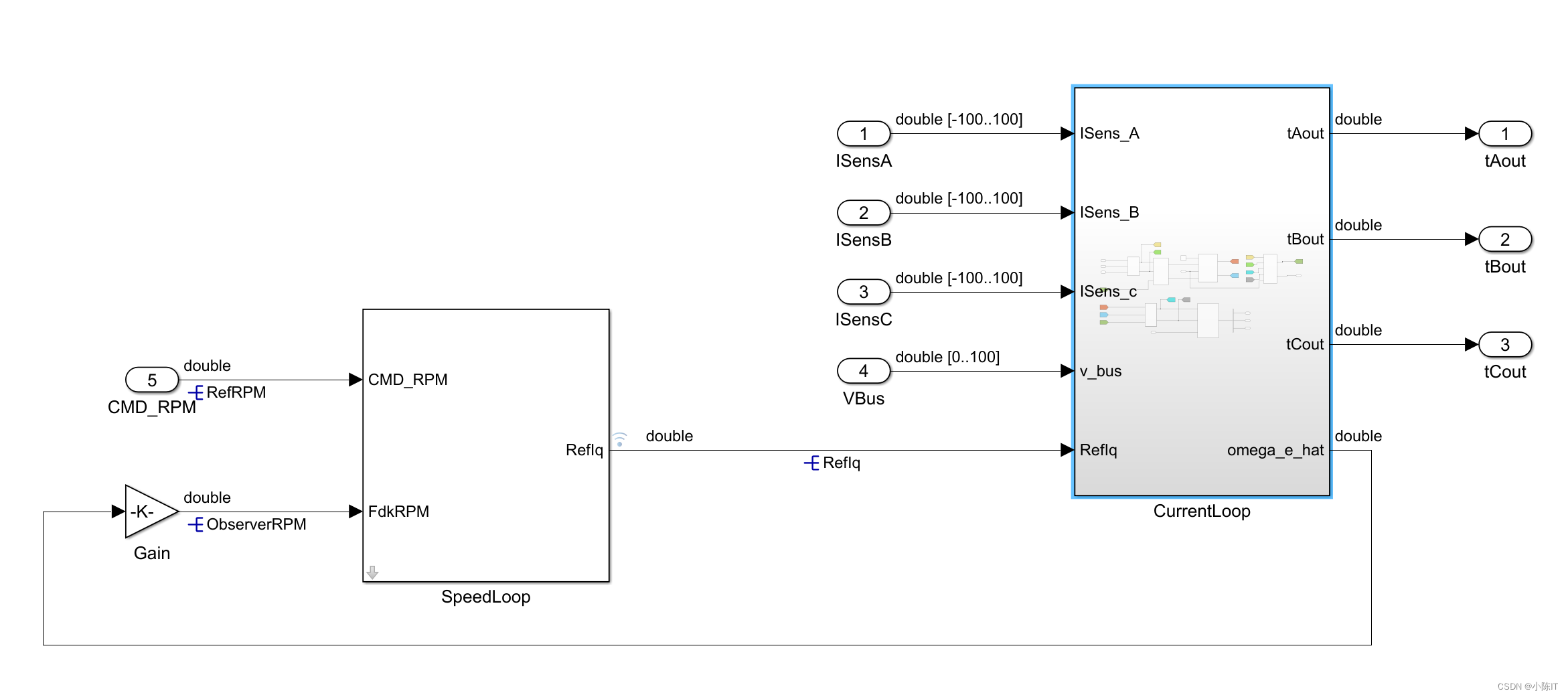
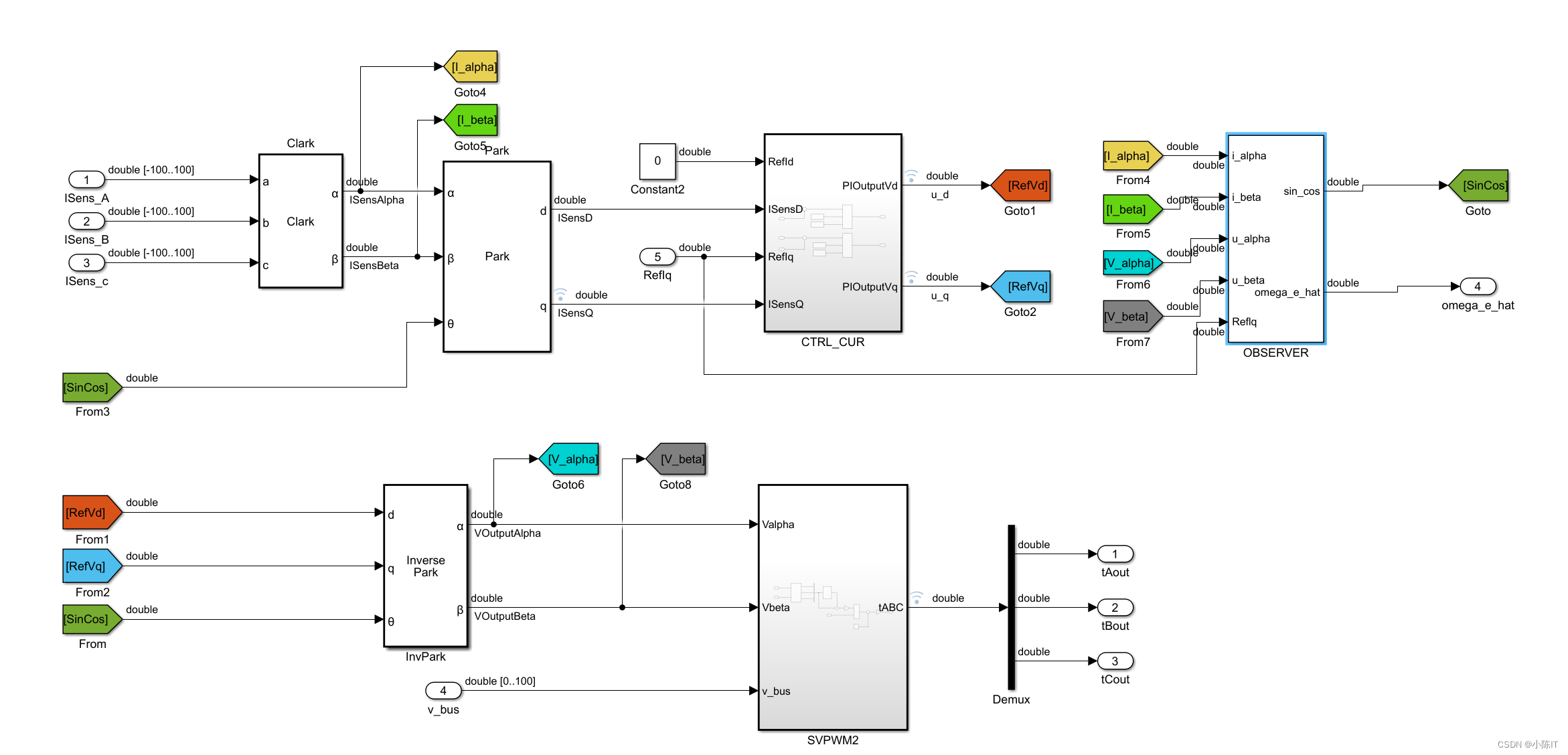
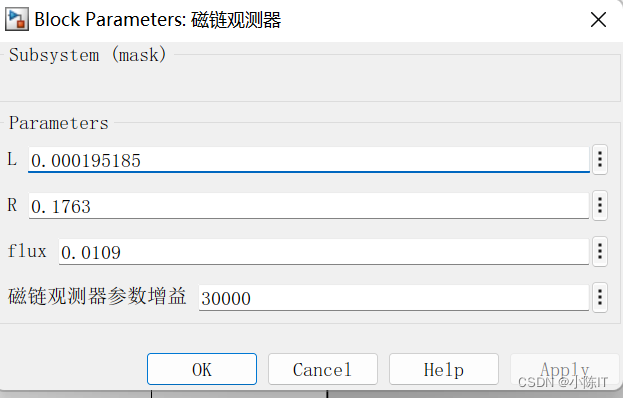
1、这是最外层: 我先分别介绍1、2、3 对于1: gain为4199 对于2: 在matlab/simulink库里面有,找一下,找不到就是版本低。 对于3: TsBSP_MODEL为2.5e-5 极对数那个单词能看懂吧,极对数是5 电感Ls是0.000195185 磁链是0.0109 图中的k一个为30/pi,一个为1/200 2、下面介绍FOC算法,下面是FOC内部,也是分层介绍 图中100是给定速度,上面的限幅是100,-100,k是1/(2*pi)*60 theta的限幅我不解释,只截图 介绍完毕。 3、下面介绍FOC_CURRENT模块:
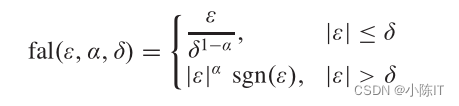
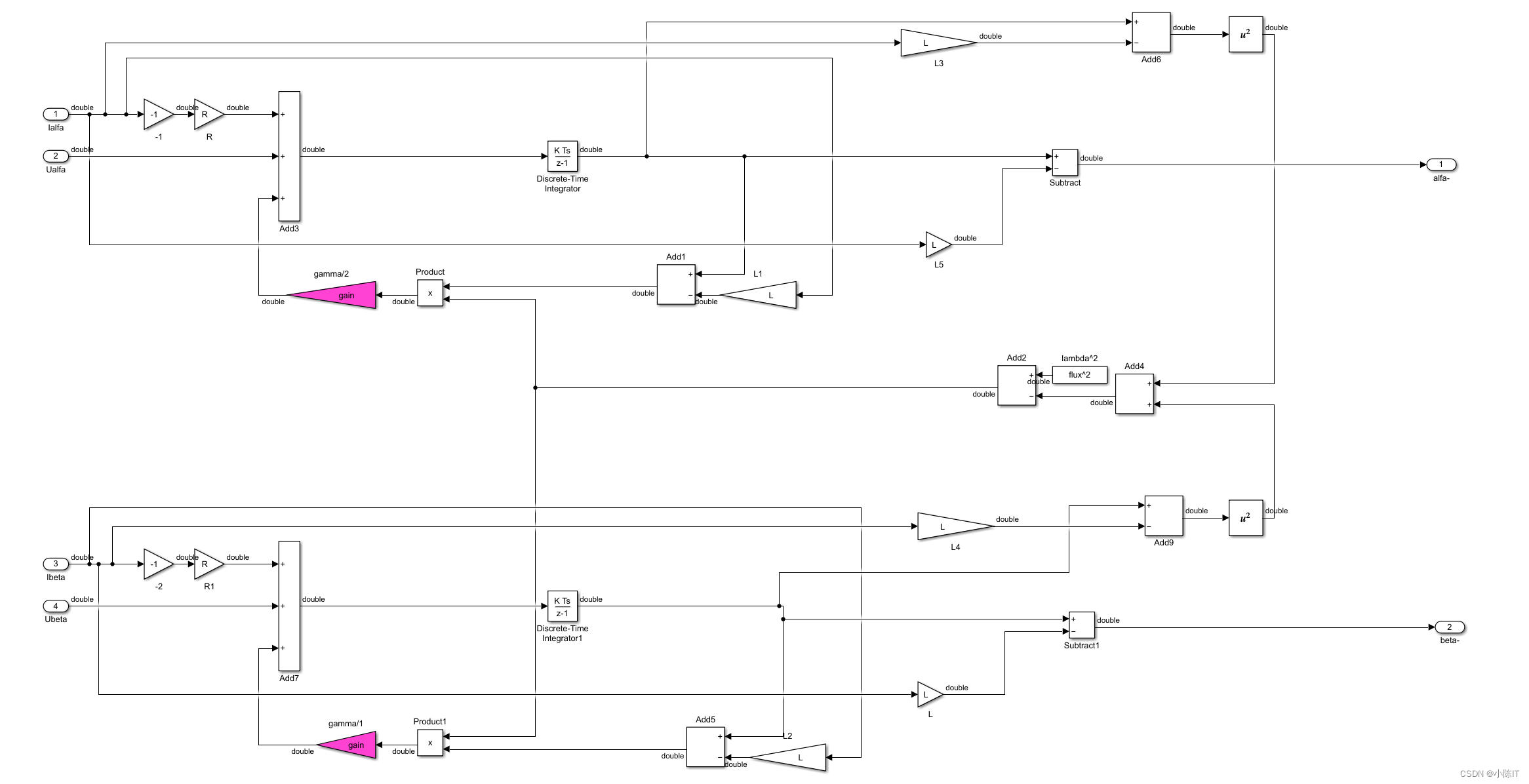
这是速度环估计仿真框图: 图中b=5,c=1 下面说CurrentLoop模块: 上图的park变换,反park变换,Clark变换,SVPWM不介绍,不懂得私聊或者发评论。着重介绍观测器和AESO(三阶自适应ESO):上图的由上那个框图: 磁链观测器: 你会发现我的增益gamma给的特别大,这个视情况而定,大了波形好。 AESO模块: 先说右边的integrator(离散积分)模块: k为0.0001 AESO内部: 你会发现我没有用非线性fal函数,因为加上我不知道哪里出错了,希望大家加上跑一下,可以的话交流一下。
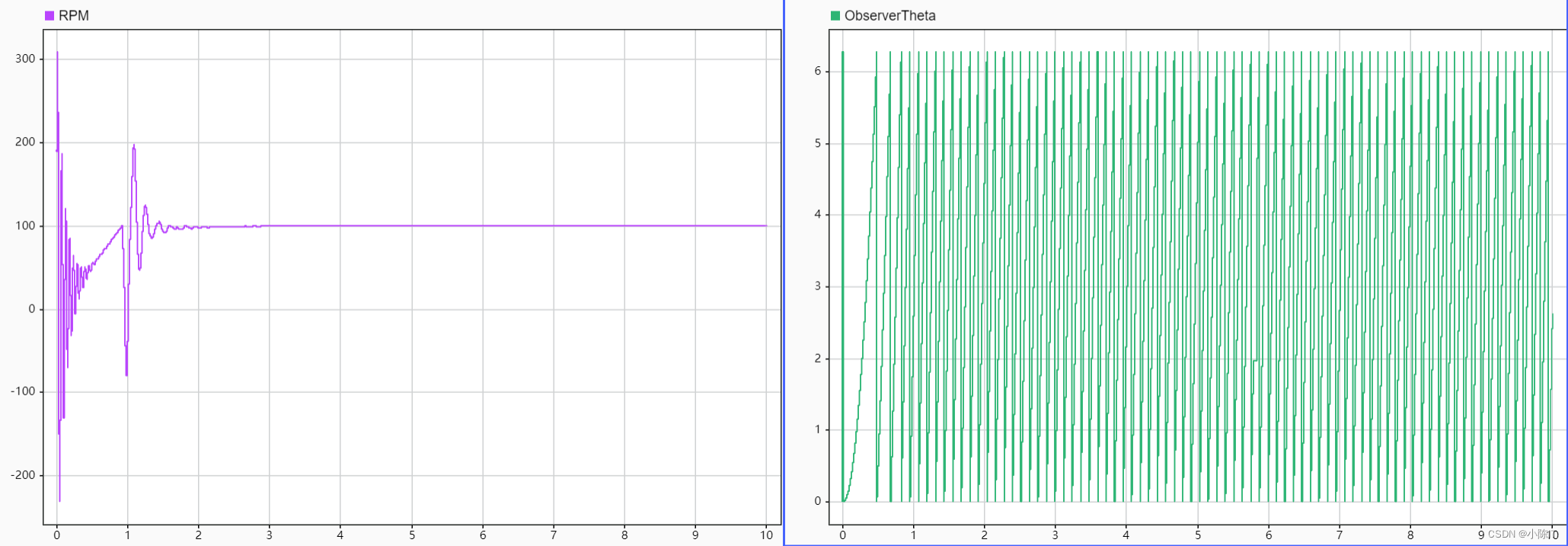
上图是速度和角度波形,可以看出还是不错的
1、b越大,上升时间越小,响应性越好。 2、k的大小改变的是角度的周期变大。 3、没有加AN(归一化) 4、非线性fal没有加,有错 5、谁能加上做出来,可以交流一下。