kvaser pcie can 在ros中使用socketcan开发
0.系统配置
Ubuntu 16.04.6 LTS
Linux version 4.15.0-45-generic
1.官网下载地址
https://www.kvaser.cn/downloads/
2.安装linux驱动
官网下载 Kvaser Linux Drivers and SDK 版本:v5.33.212
解压后(按readme步骤安装即可!)
cd linuxcan
make
sudo make install
注意!make install 后不要 load!!!!!
安装完成后,可以使用 lspcie命令查看pcie端口是否已加载kvaser。
3.安装socketCAN驱动
官网下载 Kvaser SocketCAN Device Drivers 版本:v1.4.0
解压后(按readme步骤安装即可!)
cd socketcan_kvaser_drivers
sudo make uninstall KV_MODULE_NAME=kvaser_pciefd
make KV_MODULE_NAME=kvaser_pciefd
sudo make install KV_MODULE_NAME=kvaser_pciefd
sudo make load KV_MODULE_NAME=kvaser_pciefd
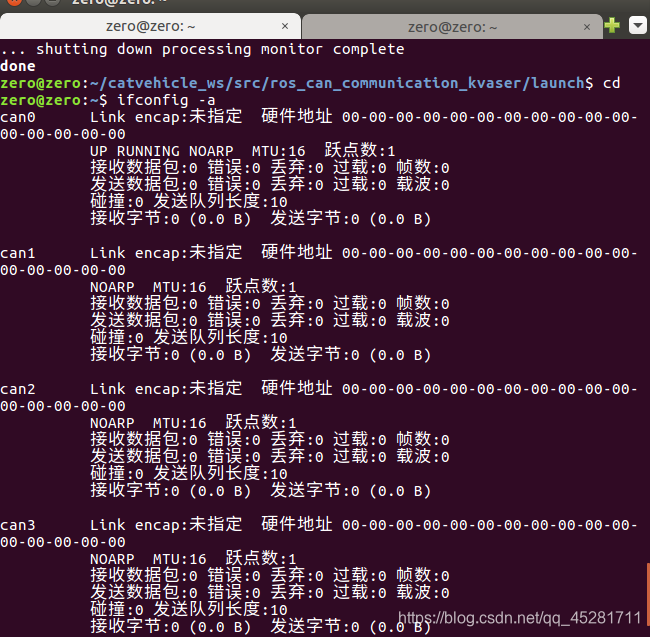
4.检查是否安装成功
使用命令 ifconfig -a
5.绑定并打开can口并设置波特率:
sudo ip link set can1 type can bitrate 500000
sudo ip link set up can1
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)