很久没更新,看见订阅数量持续增加,感觉得加点料才对得起大家的
旋转矩阵:
前言:在网上搜索到的一下关于旋转矩阵的表达形式,看起来很像,都是三角函数组合成,不同资料的正负号或者字母不一样,甚至一些是有模有样的复制粘贴,看的脑壳疼
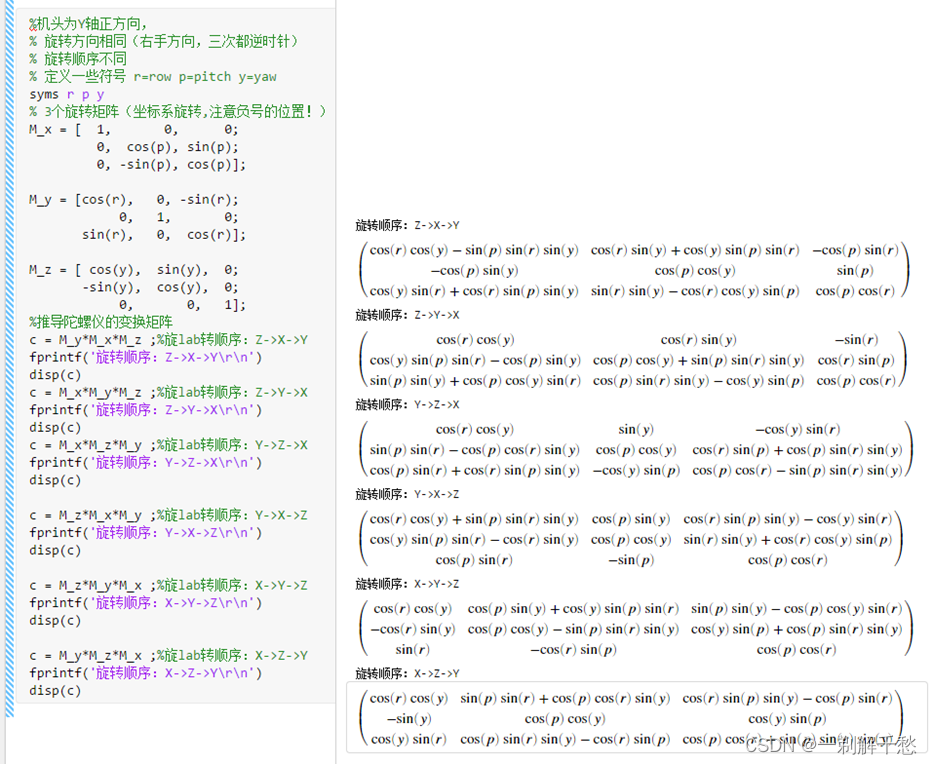
旋转矩阵的形式因机头方向的选取,旋转顺序,旋转方向三者的不同,看起来不一样,我使用matlab计算了几个旋转矩阵。
1,如图,当机头方向和旋转方向一定,旋转顺序不同,得到的旋转矩阵:
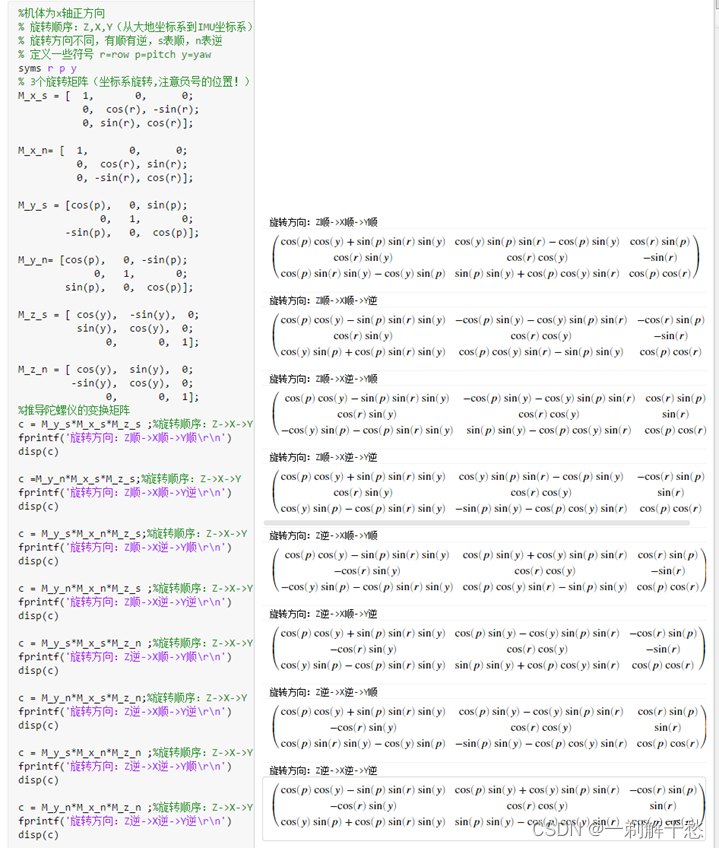
2,机头方向和旋转顺序一定,旋转方向不同,又是这样的形式:
对于正点原子的:
机头方向:
x轴正方向
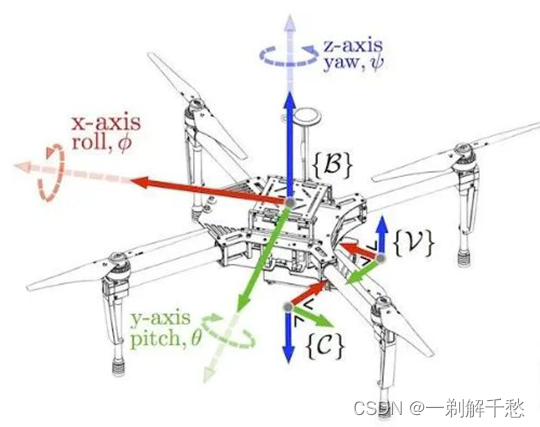
旋转方向:
笛卡尔右手系规则
通俗点,从顶是看,就是逆时针旋转
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)