附件准备材料:我自己的资料MPU9250.c和MPU9250.h
1,使用stm32cubemx配置好IIC
2,在c/c++处加入宏定义MPU9250,EMPL
最后为:
USE_HAL_DRIVER,STM32F103xE,MPU9250,EMPL
3,加入对应的lib
4,将驱动库加入工程,更改驱动库,注释掉不需要的代码,同时包含头文件MPU9250.h

5,只需更改上面3个
“inv_mpu.c”,注释掉如下代码:

MUP9250.h的头文件的地址也要对应更改:

“inv_mpu.h”,包含头文件

"inv_mpu_dmp_motion_driver.c"注释掉如下代码:


“inv_mpu_dmp_motion_driver.h”,不变
“log_stm32.c”注释掉如下代码:

这3个函数,都更改fputc
int _MLPrintLog (int priority, const char* tag, const char* fmt, …)
void eMPL_send_quat(long *quat)
void eMPL_send_data(unsigned char type, long *data)
加入:
FILE * noUse;
fputc(out[i],noUse);
举例:

最后:主函数包含头文件
就能调用函数了
MPL比DMP效果好,偏航较长时间不变,需要文件的邮箱联系
实测:MPL比DMP更好,短时间偏航 “一动才动”
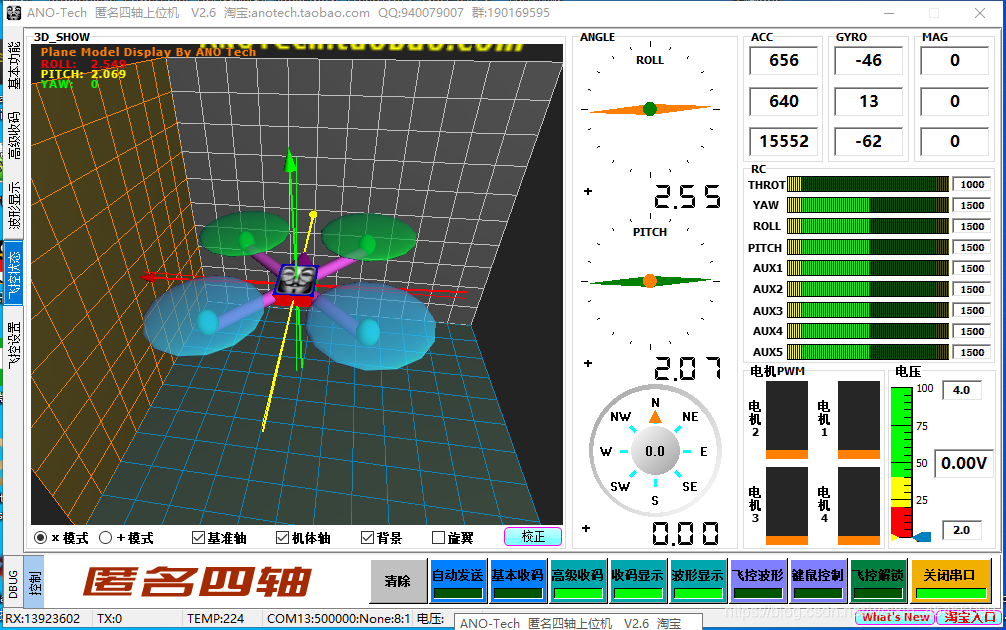
DMP效果如下:
mpu9250的DMP获取数据效果,短时间偏航变化比MPL大
MPL效果如下:
基于stm32f130rct6主控,九轴传感器mpu9250的mpl,偏航居然能一动才动
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)