Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
DSP的PWM
2023-05-16
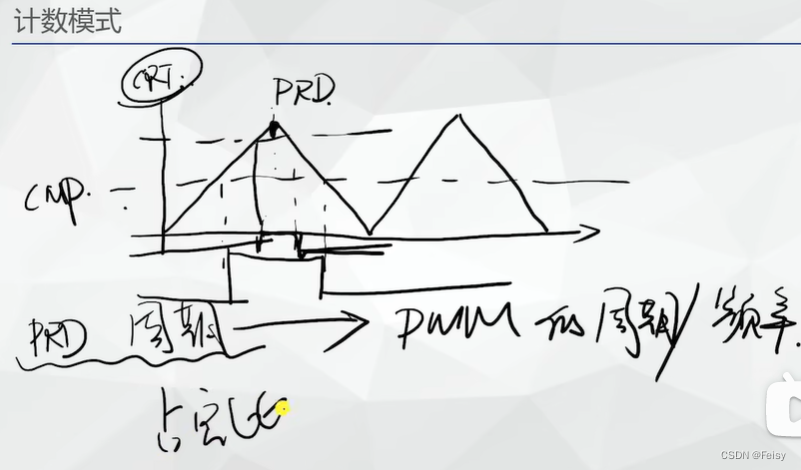
PRD:周期寄存器,决定了PWM的周期/频率
CMP:比较寄存器,决定了PWM的占空比
CRT:计数寄存器
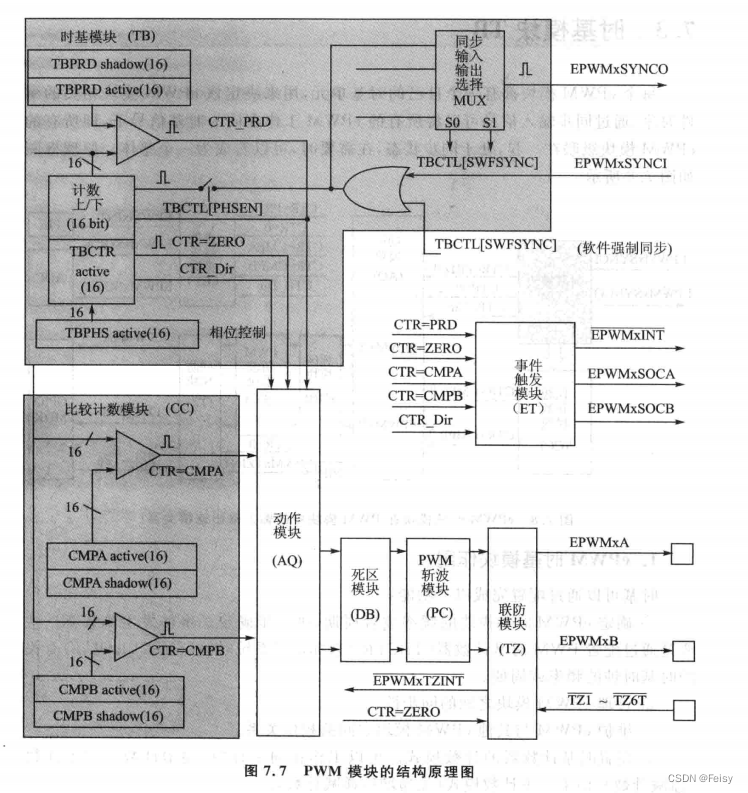
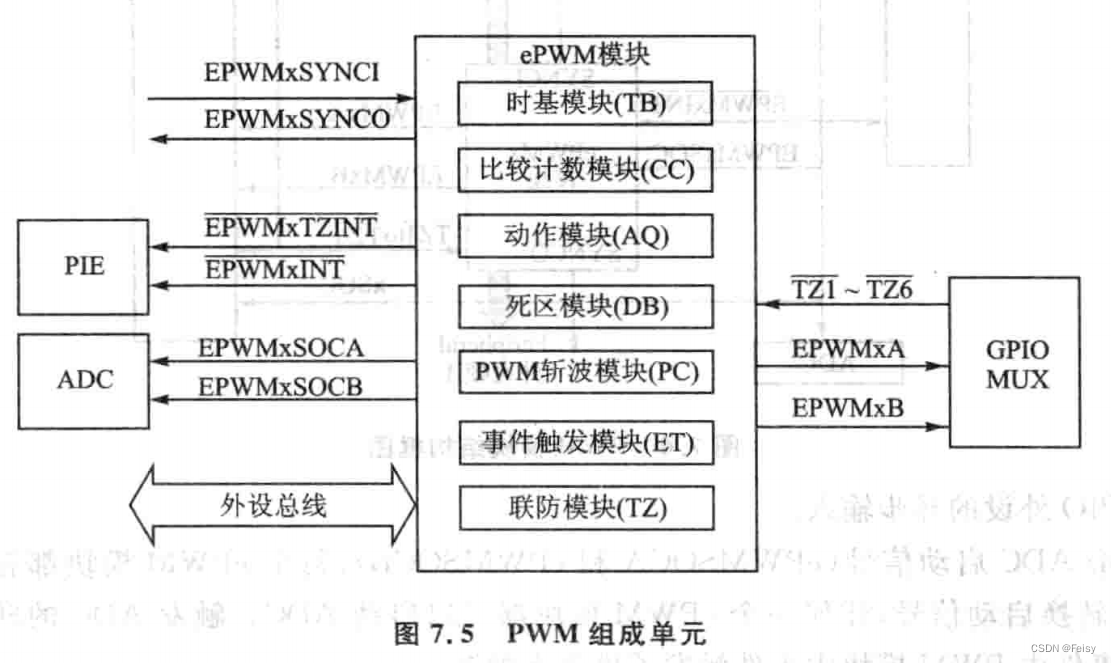
PWM原理图
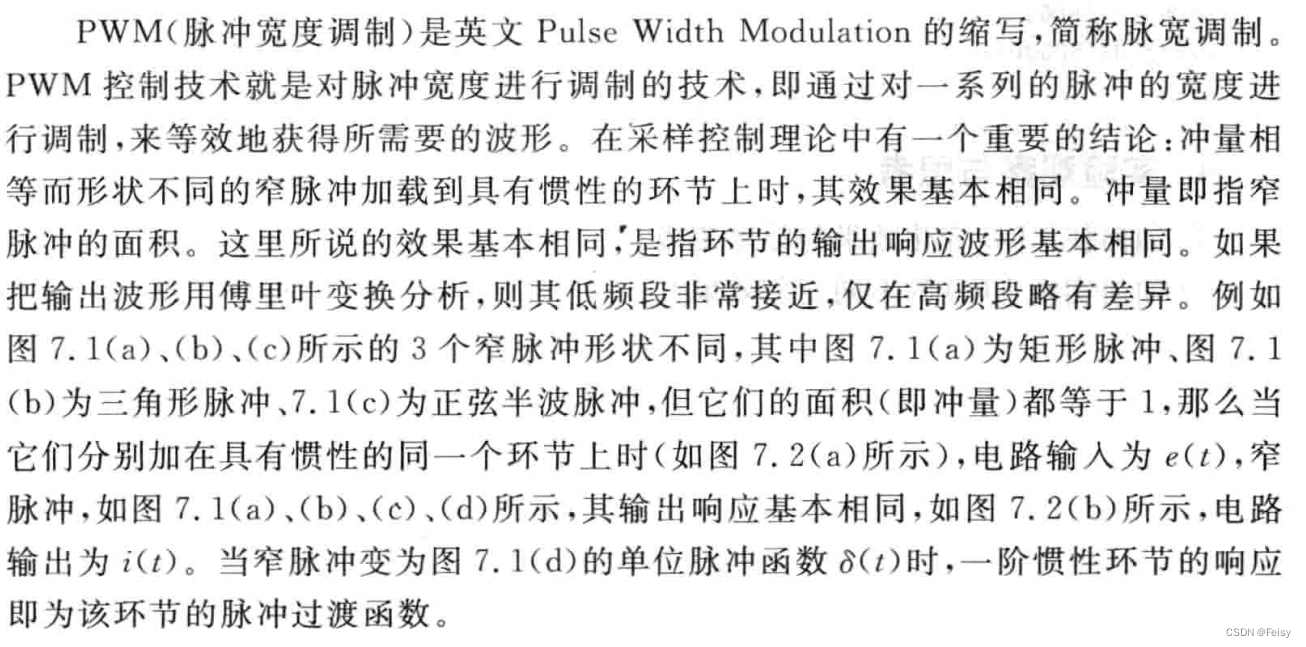
为什么需要PWM
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
DSP
PWM
DSP的PWM 的相关文章
浅谈PWM控制电机
先简单说说这几种模式 1 双极模式 xff0c 即电枢电压极性是正负交替的 xff0c 优点 xff1a 能正反转运行 xff0c 启动快 xff0c 调速精度高 xff0c 动态性能好 xff0c 调速静差小 xff0c 调速范围大 xf
STM32CUBEMX使用PWM+DMA驱动WS2812
STM32CUBEMX使用PWM 43 DMA驱动WS2812 首先在stm32cubemx中设置pwm和dma 我设置了TIM1的CH1为PWM引脚编写DMA响应函数 xff0c 即PWM DMA完成数据发送后的回调函数 PWM DMA
stm32使用PWM播放音频
我之前研究过STM32的DAC播放wav音频文件 xff0c 今天突然发现使用PWM也可以实现WAV文件的播放 xff0c 让在大开了眼界 xff0c 转载如下 xff1a stm32使用PWM播放音频 pwm stm32 dac pcm
PWM互补输出,以及死区时间计算
本文基于野火例程进行解说 实验内容 本次实验输出一对互补的pwm波 xff0c 且进行死区时间的计算说明 代码 互补输出对应的定时器初始化代码 xff1a bsp advance tim c span class token comment
怎么把PWM信号转为模拟量
有一个测量位置变化的位置传感器 xff0c 用万用表电压档测量传感器的输出信号 xff0c 结果显示的是模拟量信号 xff0c 即位置和信号输出大小呈线性关系 但是 xff0c 用示波器 xff08 Picoscope 4227 xff09
DSP数据安全平台
数据安全平台 xff08 DSP xff0c Data Security Platforms xff09 的概念来源于Gartner的 2021数据安全技术成熟度曲线 xff0c DSP定义为以数据安全为中心的产品和服务 xff0c 旨在跨
快速学习Stm32舵机控制板控制一个舵机运动
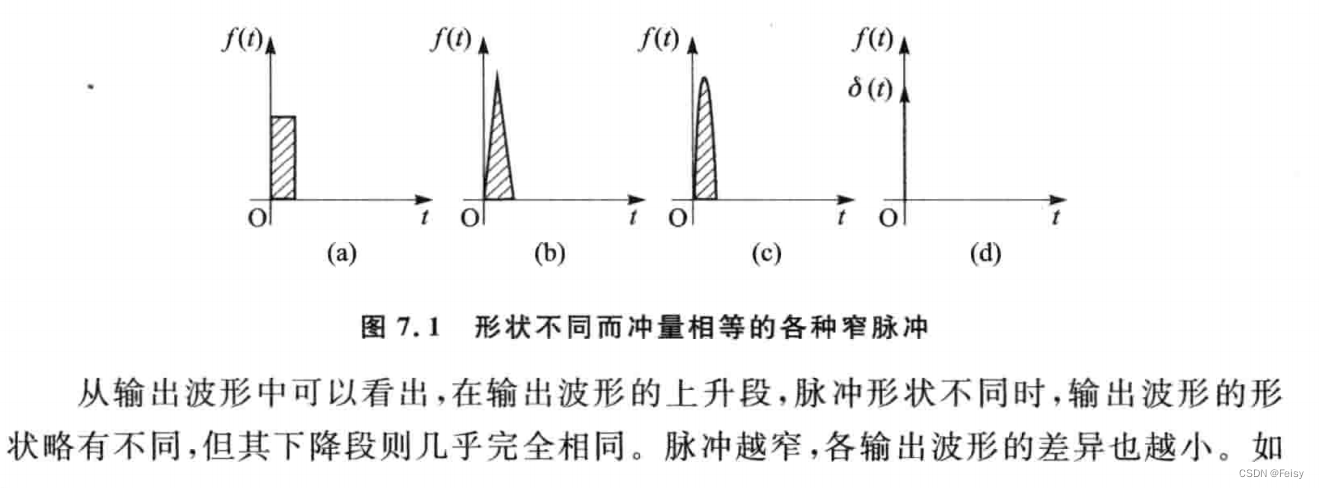
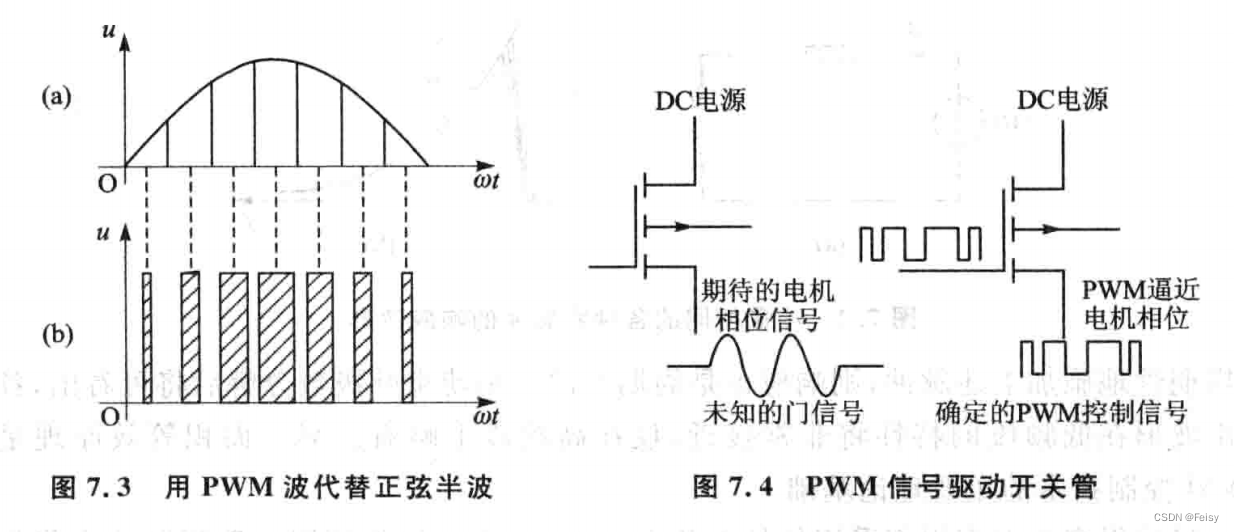
PWM是什么 PWM 英文名Pulse Width Modulation 是脉冲宽度调制缩写 它是通过对一系列脉冲的宽度进行调制 等效出所需要的波形 包含形状以及幅值 对模拟信号电平进行数字编码 也就是说通过调节占空比的变化来调节信号 能量
TI DSP TMS320C66x学习笔记之VLIB测试数据(三)
VLIB是TI提供的针对C6x优化过的视觉库 下载地址 http software dl ti com libs vlib latest index FDS html 提供40多个核心函数 主要实现以下功能 Background Model
MATLAB利用FFT对信号进行频谱分析
1 实验目的 1 进一步加深DFT算法原理和基本性质的理解 因为FFT只是DFT的一种快速算法 所以FFT的运算结果必然满足DFT的基本性质 2 熟悉FFT算法原理和FFT程序的应用 3 学习利用FFT对离散时间信号进行频谱分析的方法 了解
CCS安装编译器的方法
TI公司的编译器叫CGT code generation tools 先下载所需版本的CGT 到TI官网找CGT 在www ti com cn上搜索CGT 即可找到C2000 CGT C2000代码生成工具 编译器 也可以直接到这里找 C2
傅里叶变换的实质--正交之美
引 最近在搞一个音频解码器 将随意录制好的声音按照不同的频率分离出不同的音频流 然后推到不同的音箱中 如果再考虑一下音场的谐性 那就是一个N 1声道的解码系统了 我只是想在女儿 或者儿子 出生之前为她做点事情 以便能最终做出个东西送给她 或
MCU和DSP区别
1 概述 随着处理器技术的不断发展 目前来看CPU Central Processing Unit 逐渐出现三种分支 分别是DSP Digital Signal Processing Processor 数字信号处理 以及MCU Micro
如何使实时数据采集处理系统保持数据的高速传输
如何使实时数据采集处理系统保持数据的高速传输 1引言 当前 越来越多的设计应用领域要求具有高精度的A D转换和实时处理功能 在实时数据采集处理系统设计中 一般需要考虑数据采集以及对采集数据的处理 而对于大数据量的实时数据采集处理系统来说 保
(多核DSP快速入门)5.SYS/BIOS的使用实例分析
原创文章 转载请注册来源http blog csdn net tostq 系列教程目录 http blog csdn net tostq article details 51245979 SYS BIOS是一个可扩展的实时内核 或者说是操作
详解三相直流无刷电机驱动器硬件原理图
三相直流无刷电机是指具有三相的绕组 无电刷和换向器 或集电环 的电机 并采用直流电经过逆变电路进行驱动的电机 与传统的 有刷直流电机相比 直流无刷电机采用了电子换向取代有刷电机的机构换向 取消了电刷和换向器 并将原有 有刷电机 中的定转子颠
stm32f103 TIM2定时器4路PWM输出实验
这里以TIM2为例 pwm c include pwm h uint16 t TIM2 CCR1 Val uint16 t TIM2 CCR2 Val uint16 t TIM2 CCR3 Val uint16 t TIM2 CCR4 Va
如何在DSP CCS开发环境中添加VLIB图像处理的库
CCS Version 5 5 0 00077 VLIB VLIB Function Reference Release 3 3 2 0
对高精度PWM(HRPWM)的理解
传统PWM的精度 假定CPU工作频率为100MHz PWM模块的计数频率也一样 则计数周期为10ns 假设PWM的开关频率为1MHz 使用向上计数模式 那么 计数周期PRD等于100 此时 比较值只能在0 100里面选 占空比的精度只有1
HXDSP2441-地址空间转换
地址空间转换 地址空间本身很简单 但由于HXDSP2441同时有DSP核和CPU核 且二者寻址方式不同 导致编程中会有歧义 DSP核采用字地址编址方式 CPU核和总线空间内都采用字节地址编址方式 而且文档中所涉及的所有寄存器地址及偏移等均为
纯国产DSP,QX320F28335,自研内核指令集,主频150MHz,自研工具链,硬件兼容TMS320F28335
32位单核CPU 主频150MHz flash 1M SRAM 500KB 单精度浮点运算FPU 3个4M精度12位的ADC 12个ePWM 6个HRPWM 150ps
随机推荐
用C语言做很简单的飞机游戏
首先 xff0c 可以通过第一步的 xff0c 通过空格和换行来显示出飞机 include lt stdio h gt include lt stdlib h gt int main int pox poy int x 61 20 int
核心案例|中国民用航空飞行学院半实物飞行仿真平台
项目名称 xff1a 无人机半实物飞行仿真平台 场 地 xff1a 室内 关 键 词 xff1a 无人机 仿真平台 飞行控制 核心案例中国民用航空飞行学院航空电子电气学院 01 项目背景 目前在无人系统众多重点方向开展研究时 xff0c 基
使用高速视觉反馈的无人机自主目标跟踪
在无人机视觉系统的常规研究中 xff0c 用于基于视觉的导航的视觉同步定位和映射 xff08 Visual SLAM xff09 和视觉里程计 xff08 VO xff09 是主要课题 V SLAM技术构建无人机经过的周围环境的实时地图 x
6款常见的无人机仿真开发平台(附超详细特点功能对比)
随着无人机与无人集群的快速发展 xff0c 开发者对于无人机系统仿真测试环境的需求也日渐显现 本文整理了几款常见的无人机仿真平台 xff0c 旨在为开发者提供一款更为易用 通用且真实可靠的平台 无人机与无人集群的研制应用快速发展 xff0c
使用嵌入式无人机平台在大地形场景中进行机载实时密集重建
大场景中的实时密集重建仍面临一些挑战 有两个主要的未解决问题导致应用受限 首先 xff0c 由于视差不足 xff0c 大场景或远距离目标的3D重建难以获得稳定的精度 其次 xff0c 随着大场景数据量的增加 xff0c 由于计算复杂度与优化
猿创征文 | 一文看懂!无人机集群半物理仿真系统的7大模块拆解,超详细!
在无人机集群研究领域 xff0c 仿真验证技术可以高效且低廉的对算法理论 xff0c 极大的缩短研制周期 xff0c 降低研制成本 全数字仿真技术和半物理仿真技术是仿真验证技术的两种主要实现方式 xff0c 本篇带你快速了解 无人机集群半物
SupSLAM:使用SuperPoint用于无人机的鲁棒视觉惯性 SLAM 系统
近年来 xff0c 使用机器学习技术进行特征提取的现代基于特征的 SLAM受到越来越多的关注 xff0c 并有望在几乎所有机器人工作环境中超越传统方法 这种方法利用经过训练的网络来学习关键点 xff0c 从而增强视觉SLAM数据关联的鲁棒性
使用强化学习和YOLOFlow实现基于自主无人机的目标搜索、跟踪
搜索和救援行动发生在自然灾害期间或之后 xff0c 寻找受害者目标并跟踪他们 xff0c 直到救援队到达撤离 无人机是该应用不可或缺的工具 xff0c 因为它们可以帮助在关键 时间敏感的任务中找到目标 它们可以携带各种传感器 xff0c 并
行业前沿|无人机视觉自主导航发展及视觉智能开发支撑平台介绍
01视觉自主导航技术基本介绍 近年来 xff0c 无人机在多领域表现出重要应用价值 目前 xff0c 无人机如何在未知封闭 无辅助导航支撑的环境中 xff0c 达成 在哪里 和 环境描述 并自主智能地完成特定任务 xff0c 是一个重要的研
基于图像拼接的无人机自主导航实时SLAM
大多数无人机利用全球导航卫星系统 xff08 GNSS xff09 技术和惯性传感器 xff08 INS xff09 来估计自己的地理空间定位 无人机通过GNSS接收器进行增强 xff0c 这些接收器受益于从卫星发射的接收时间无线电信号来计
jar 压缩解压缩
JAR包是Java中所特有一种压缩文档 其实大家就可以把它理解为 zip包 当然也是有区别的 JAR包中有一个META INF MANIFEST MF文件 当你找成JAR包时 它会自动生成 JAR包是由JDK安装目录 bin jar exe
Inverse elbow manipulator的正逆运动
Inverse elbow manipulator 该结构同样是6 DOF xff0c 只是后面三个关节不是重合 这样子的结构 xff0c 工作空间更大 正运动好做 xff0c 逆运动还在推导中
使用IMU进行状态估计及进阶
文章目录 前言基本思想一 姿态估计1 1 通过6轴IMU来进行姿态估计的入门级方法1 1 1 通过加速度计计算姿态1 1 2 引入陀螺仪来得到更好的姿态估计 1 2 四元数解算姿态角解析 二 姿态估算与滤波的关系2 1 状态方程和观测方程2
Mujoco-小球建模与控制
视频教程 xff1a https www bilibili com video BV1e44y1H7Mn 资源请到tiny cc mujoco下载 涉及内容 本次课程制作了一个简单的小球模型 然后对小球进行简单的模拟 xff0c 并演示了一
Mujoco-欠驱动的二阶单摆的LQR控制
MuJoCo Lec7 span class token keyword void span span class token function f span span class token punctuation span span c
四元数姿态计算
本文基本上就是 1 的注解 一基本概念 1 1 四元数的定义 Quaternion A quaternion is a four dimensional complex number 四元数是一个四维的复数 写成行向量形式的话 q 61 q
Mujoco的关节与外力和驱动器
核心公式 xff1a M qacc 43 qfrc bias 61 qfrc applied 43 ctrl M xff1a 惯性矩阵 qacc 加速度 qfrc bias 科里奥利矩阵和重力矩阵之和 xff1a qfrc bias 61
F28069的cpu定时器
工程搭建参考 xff1a https blog csdn net feisy article details 126380289 F28069有三个32位的CPU定时器 xff1a 0 1 2 0 xff0c 1可用 xff0c 如果程序未
TI DSP的中断
F28069的中断数是96个 xff0c 分为12组 The PIE block can support 96 individual interrupts that are grouped into blocks of eight Each
DSP的PWM
PRD 周期寄存器 xff0c 决定了PWM的周期 频率 CMP 比较寄存器 xff0c 决定了PWM的占空比 CRT 计数寄存器 PWM原理图 为什么需要PWM
热门标签
reversedns
cakephp2x
cab
xfdf
xforms
pageeditor
gml
ignorecase
bndtools
spoof
monadplus
glyph
tesstwo
expss
bitstream
spinejs