Up Board安装ROS及mavros
目录
- Up Board安装ROS及mavros
- 一、在Up Board安装Ubuntu系统
- 1.材料准备
- 2.拿一个空的U盘作为驱动盘为Up Board安装系统
- 3.安装Ubuntu系统
- 二、在Ubuntu系统安装ROS
- 三、配置及在ROS添加mavros功能包
一、在Up Board安装Ubuntu系统
1.材料准备
Up Board x1

另外需要准备 :
HDMI线 x1 用于连接屏幕
5V4A DC电源 x1 给微型电脑供电
USB线 x1 为外接屏幕供电
键盘、鼠标 x1 控制微型电脑
外接屏幕 x1
U盘 x1 作为驱动盘为微型电脑安装系统
2.拿一个空的U盘作为驱动盘为Up Board安装系统
1.下载Ubuntu18.04镜像
可以从Ubuntu官网下载,也可以网上找资源
百度网盘:
https://pan.baidu.com/s/1FkBDt0oV6nfmsCdm7gyyOA
提取码:t849
- 制作启动盘(此处参考了CSDN作者“谁偷了我的小鱼干儿”,该作者提供了十分具体的步骤)
https://blog.csdn.net/Albert_1000/article/details/95632770?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522165227886616782388085717%2522%252C%2522scm%2522%253A%252220140713.130102334…%2522%257D&request_id=165227886616782388085717&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduend~default-1-95632770-null-null.142%5Ev9%5Epc_search_result_control_group,157%5Ev4%5Econtrol&utm_term=Ubuntu%E9%A9%B1%E5%8A%A8%E7%9B%98&spm=1018.2226.3001.4187
①下载Ultra ISO(可免费试用)
网址:https://cn.ultraiso.net/xiazai.html
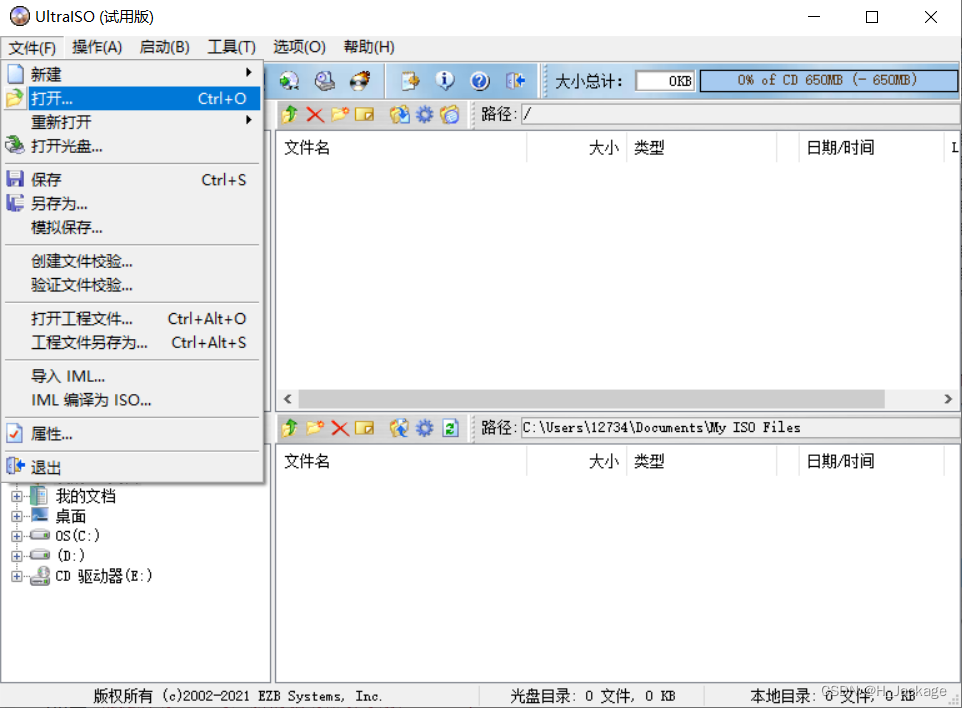
②写入文件
选择下载好的Ubuntu18.04镜像
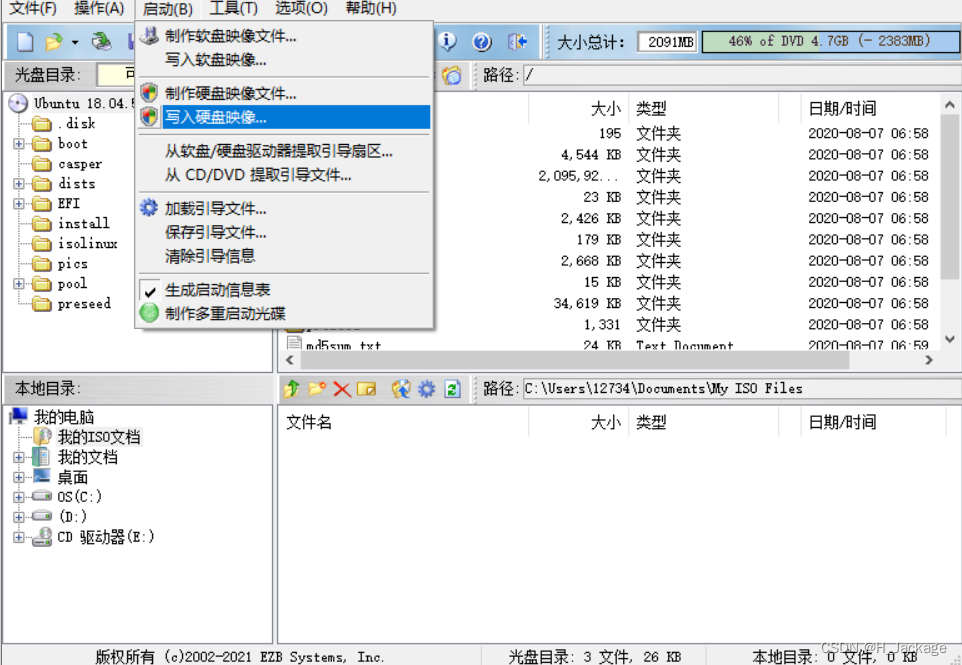
③写入U盘
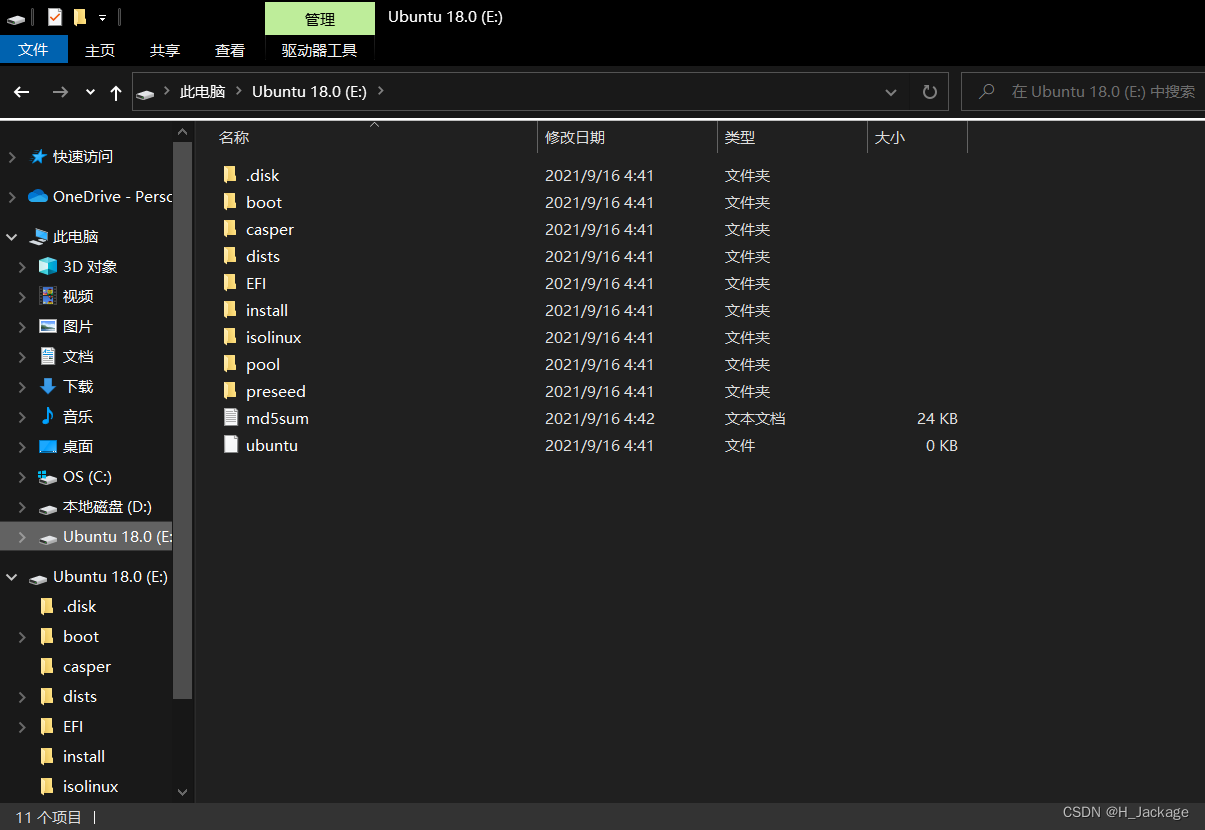
④装好后,U盘显示是这样的:
3.安装Ubuntu系统
①首先,把5V4A DC电源插到Up Board,把键盘、鼠标及U盘接到Up Board,HDMI线与屏幕连接作为显示屏
②Up Board默认驱动盘优先启动,所以接通电源后,它会自动识别,并进入安装系统程序
③只有少数情况Up Board在安装系统前需要输入密码
密码应该是upassw0rd,网上查就知道了
④随后根据指示操作就行了,安装步骤可以参考CSDN作者小池澈平(很详细,基本能解决安装问题)
https://blog.csdn.net/h1475457833/article/details/105416883
二、在Ubuntu系统安装ROS
安装ROS过程我之前写过 传送门
因为Up Board性能有限,操作过程比较慢,所以我在这里推荐使用鱼香ROS的一键安装
https://fishros.org.cn/forum/topic/20/%E5%B0%8F%E9%B1%BC%E7%9A%84%E4%B8%80%E9%94%AE%E5%AE%89%E8%A3%85%E7%B3%BB%E5%88%97?lang=zh-CN
三、配置及在ROS添加mavros功能包
这里我根据XTDrone语雀的使用文档安装mavros
- 依赖安装
sudo apt install ninja-build exiftool ninja-build protobuf-compiler libeigen3-dev genromfs xmlstarlet libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev
pip2 install pandas jinja2 pyserial cerberus pyulog==0.7.0 numpy toml pyquaternion empy pyyaml
pip3 install packaging numpy empy toml pyyaml jinja2 pyargparse
安装mavros
sudo apt install ros-melodic-mavros ros-melodic-mavros-extras
wget https:
sudo chmod a+x ./install_geographiclib_datasets.sh
sudo ./install_geographiclib_datasets.sh
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)