5GC architecture N1、N2、N3、N4、N6、N9、N26接口
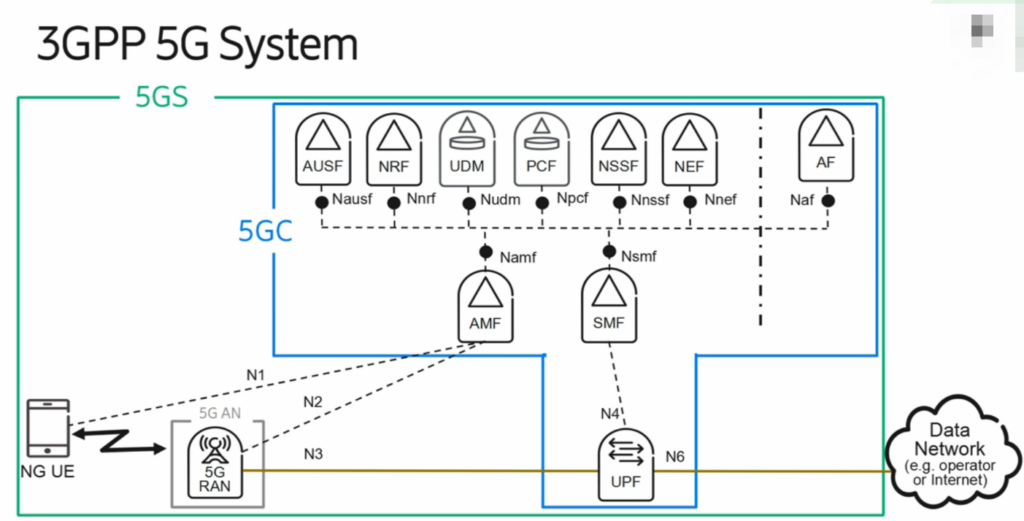

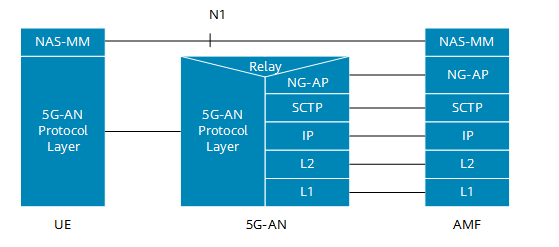
N1接口
N1接口为UE和AMF间的信令面接口。N1是逻辑概念的接口,不存在物理口。
N1接口基于N2接口信令实现。
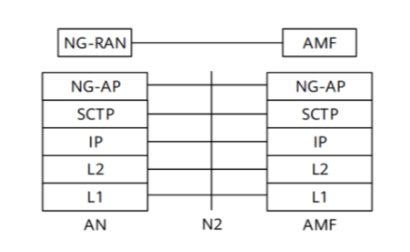
N2接口
N2接口为(R)AN和AMF间的信令面接口。类似于4G中的s1-mme接口。
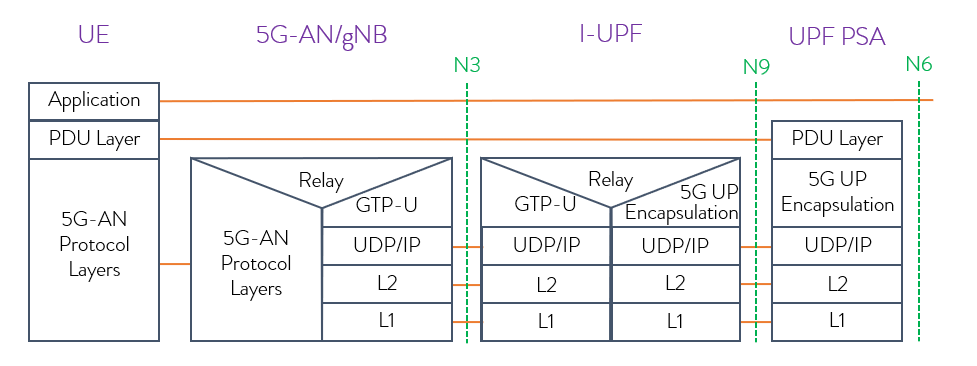
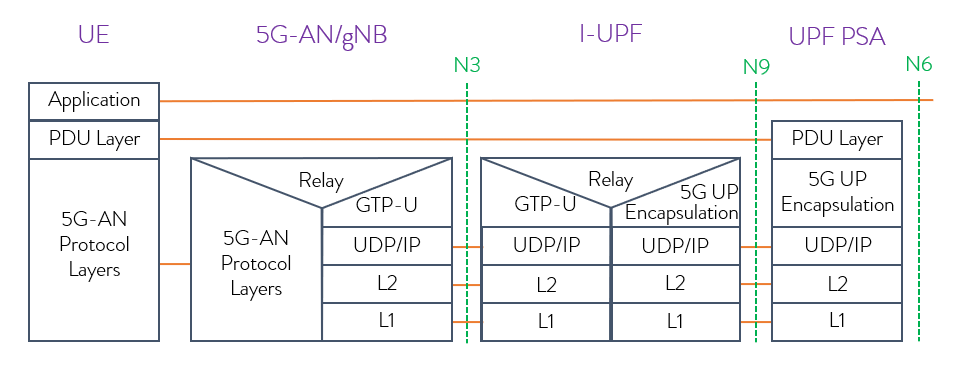
N3接口
N3接口是5G (R)AN(Radio Access Network )与UPF(User Plane Function)间的接口,主要用于传递5G (R)AN与UPF间的上下行用户面数据。
N4接口
N4接口为SMF和UPF间的接口,用于传输SMF和UPF间的控制面信息。

、
N6接口
N6接口是 UPF(User Plane Function)与DN(Data Network)的接口,用于传递UPF与DN之间的上下行用户数据流,基于IP和路由协议与DN网络通信。
N9接口
N9接口为UPF(User Plane Function)和UPF之间的用户面接口,用于传递UPF间的上行、下行用户数据流。
用于单会话,多锚点。漫游的时候也通过N9连接。
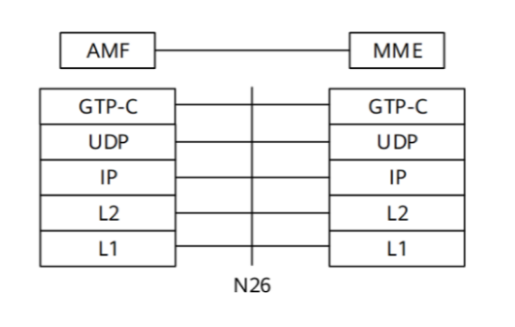
N26接口
N26接口为MME和AMF间的信令面接口。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)