5GC 网元AMF、SMF、AUSF、UPF、PCF、UDM、NRF、NSSF、NEF介绍
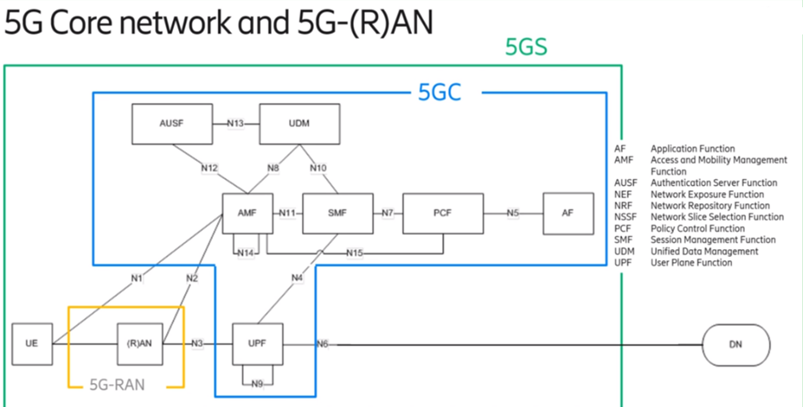
1、AMF
Access and Mobility Management Function,接入和移动性管理功能,执行注册、连接、可达性、移动性管理。
为UE和SMF提供会话管理消息传输通道,为用户接入时提供认证、鉴权功能,终端和无线的核心网控制面接入点。
类似于4G MME中移动性管理。
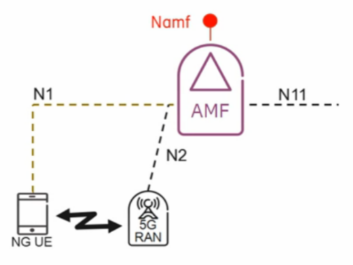
AMF分配5G-GUTI,AMF选择SMF。
2、SMF
Session Management function,会话管理功能,负责隧道维护、IP地址分配和管理、UP功能选择、策略实施和QoS中的控制、计费数据采集、漫游等。
类似于4G中MME、SGW、PGW会话管理等控制面的功能。

SMF基于UE或者会话的粒度选择UPF,可以分配IP地址,收集计费数据,连接计费中心。
选择UPF的条件:
- UPF位置、能力、负荷;
- UE位置、用户数据配置;
- UE会话信息,如DNN、PDU会话类型、会话及服务连续性、话务路由目的地。
3、AUSF
Authentication Server Function,认证服务器功能,实现3GPP和非3GPP的接入认证 。
类似于MME中鉴权功能和HSS鉴权数据管理。
4、UPF
The User plane function,用户面功能,分组路由转发,策略实施,流量报告,Qos处理。
类似于4G中sgw和pgw用户面功能。
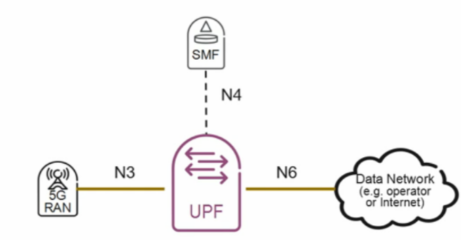
UPF是会话的锚点,记录流量转发量。
5、PCF
Policy Control function,策略控制功能,统一的政策框架,提供控制平面功能的策略规则。
类似于4G的PCRF。

PCF下发控制面网络功能。
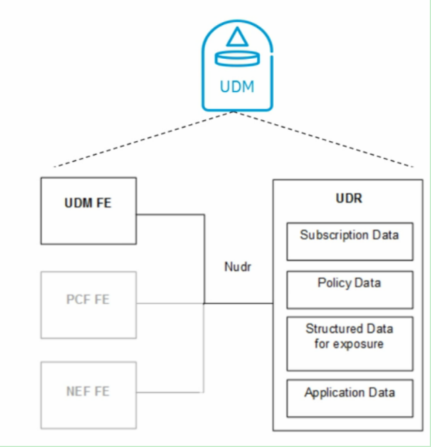
6、UDM
The Unified Data Management,统一数据管理功能,3GPP AKA认证、用户识别、访问授权、注册、移动、订阅、短信管理等。
类似于4G的HSS。
7、NRF
NF Repository Function, 该功能是一个提供注册和发现功能的新功能,可以使网络功能(NF)相互发现并通过API接口进行通信。

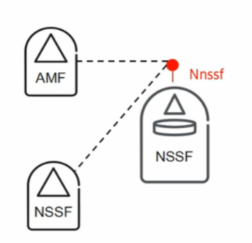
8、NSSF
The Network Slice Selection Function,网络切片选择,根据UE的切片选择辅助信息、签约信息等确定UE允许接入的网络切片实例。
9、NEF
Network Exposure Function,网络开放功能,开放各NF的能力,转换内外部信息。用于边缘计算场景。

如果觉得我的文章对您有用,请随意打赏。您的支持将鼓励我继续创作!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)