新建主题
新建pi_uart模块
- 在src目录的modules文件夹下新建pi_uart文件夹
- 在pi_uart文件夹下新建pi_uart.c
- 实现的功能:
- 开机自启动
- 持续接收串口数据(’R’开头的字符串)
- 发送串口数据
- 将接收到的数据更新发布到mytopic主题中
#include <stdio.h>
#include <termios.h>
#include <unistd.h>
#include <stdbool.h>
#include <errno.h>
#include <drivers/drv_hrt.h>
#include <uORB/topics/mytopic.h>
#include <uORB/uORB.h>
#include <px4_config.h>
#include <px4_getopt.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <fcntl.h>
#include <assert.h>
#include <math.h>
#include <poll.h>
#include <time.h>
#include <math.h>
#include <nuttx/sched.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <systemlib/param/param.h>
#include <systemlib/err.h>
#include <systemlib/perf_counter.h>
#include <systemlib/systemlib.h>
#include <systemlib/mcu_version.h>
#include <systemlib/git_version.h>
#include <systemlib/mavlink_log.h>
#include <geo/geo.h>
#include <dataman/dataman.h>
static bool thread_should_exit = false;
static bool thread_running = false;
static int daemon_task;
__EXPORT int pi_uart_main(int argc, char *argv[]);
int pi_uart_thread_main(int argc, char *argv[]);
static void usage(const char *reason);
static int uart_init(char * uart_name);
static int set_uart_baudrate(const int fd, unsigned int baud);
static void usage(const char *reason)
{
if (reason) {
fprintf(stderr, "%s\n", reason);
}
fprintf(stderr, "usage: position_estimator_inav {start|stop|status} [param]\n\n");
exit(1);
}
int set_uart_baudrate(const int fd, unsigned int baud)
{
int speed;
switch (baud) {
case 9600: speed = B9600; break;
case 19200: speed = B19200; break;
case 38400: speed = B38400; break;
case 57600: speed = B57600; break;
case 115200: speed = B115200; break;
return -EINVAL;
}
struct termios uart_config;
int termios_state;
tcgetattr(fd, &uart_config);
uart_config.c_oflag &= ~ONLCR;
uart_config.c_cflag &= ~(CSTOPB | PARENB);
if ((termios_state = cfsetispeed(&uart_config, speed)) < 0) {
warnx("ERR: %d (cfsetispeed)\n", termios_state);
return false;
}
if ((termios_state = cfsetospeed(&uart_config, speed)) < 0) {
warnx("ERR: %d (cfsetospeed)\n", termios_state);
return false;
}
if ((termios_state = tcsetattr(fd, TCSANOW, &uart_config)) < 0) {
warnx("ERR: %d (tcsetattr)\n", termios_state);
return false;
}
return true;
}
int uart_init(char * uart_name)
{
int serial_fd = open(uart_name, O_RDWR | O_NOCTTY);
if (serial_fd < 0) {
err(1, "failed to open port: %s", uart_name);
return false;
}
return serial_fd;
}
int pi_uart_main(int argc, char *argv[])
{
if (argc < 2) {
usage("[YCM]missing command");
}
if (!strcmp(argv[1], "start")) {
if (thread_running) {
warnx("[YCM]already running\n");
return 0;
}
thread_should_exit = false;
daemon_task = px4_task_spawn_cmd("pi_uart",
SCHED_DEFAULT,
SCHED_PRIORITY_DEFAULT,
2000,
pi_uart_thread_main,
(argv) ? (char * const *)&argv[2] : (char * const *)NULL);
return 0;
}
if (!strcmp(argv[1], "stop")) {
thread_should_exit = true;
return 0;
}
if (!strcmp(argv[1], "status")) {
if (thread_running) {
warnx("[YCM]running");
} else {
warnx("[YCM]stopped");
}
return 0;
}
usage("unrecognized command");
return 1;
}
int pi_uart_thread_main(int argc, char *argv[])
{
warnx("[daemon] starting\n");
thread_running = true;
char data = '0';
char buffer[4] = "";
int uart_read = uart_init("/dev/ttyS2");
if(false == uart_read)return -1;
if(false == set_uart_baudrate(uart_read,9600)){
printf("[YCM]set_uart_baudrate is failed\n");
return -1;
}
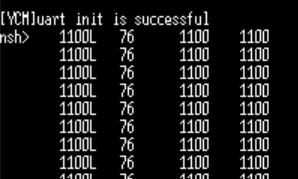
printf("[YCM]uart init is successful\n");
struct mytopic_s test_data;
orb_advert_t mytopic_pub = orb_advertise(ORB_ID(mytopic), &test_data);
while(!thread_should_exit){
read(uart_read,&data,1);
if(data == 'R'){
for(int i = 0;i <4;++i){
read(uart_read,&data,1);
buffer[i] = data;
data = '0';}
write(uart_read,&buffer,4);
char * s;
strncpy(test_data.datastr0,buffer,4);
test_data.data = strtol(test_data.datastr0,&s,10);
orb_publish(ORB_ID(mytopic), mytopic_pub, &test_data);
int b=strtol(test_data.datastr0,&s,10);
printf("\t%s\t%d\t%d\n",test_data.datastr0,test_data.data,b);
}
}
warnx("[YCM]exiting");
thread_running = false;
close(uart_read);
fflush(stdout);
return 0;
}
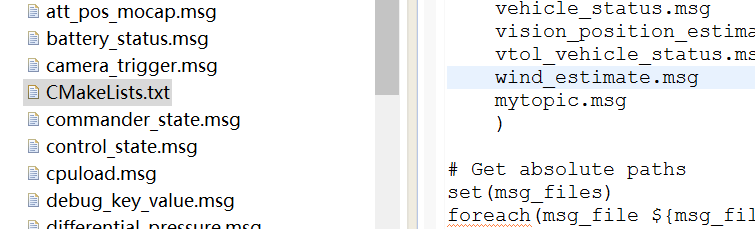
px4_add_module(
MODULE modules__pi_uart
MAIN pi_uart
STACK_MAIN 2000
SRCS
pi_uart.c
DEPENDS
platforms__common
)
- 在cmake/config/nuttx_px4fmu-v2_default.cmake中添加
modules/pi_uart
- 在ROMFS/px4fmu_common/rcS中添加
pi_uart start
树莓派3串口发送
- 树莓派3环境配置另写博文
- 循环发送‘R1100’小程序
#include <stdio.h>
#include <wiringPi.h>
#include <wiringSerial.h>
int main()
{
int fd;
char data[5]=“R1100”;
int flag=1;
if(wiringPiSetup()<0)return 1;
if((fd=serialOpen("/dev/ttyS0",9600))<0) return 1;
printf("serial test start ...\n");
serialPrintf(fd,"Hello world!\n");
while(flag)
{
serialPrintf(fd,data);
delay(300);
while(serialDataAvail(fd))
{
printf("->%3d\n",serialGetchar(fd));
flag=0; fflush(stdout);
}
}
serialFlush(fd);
serialClose(fd);
return 0;
}
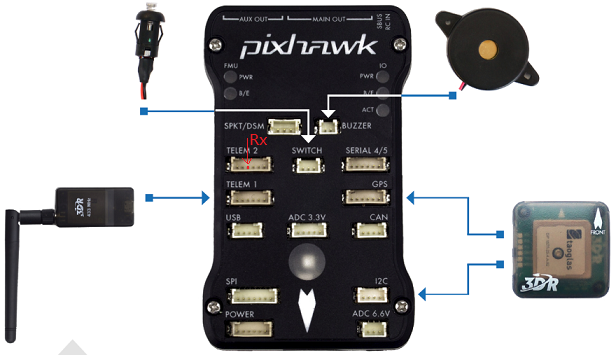
Pixhawk与树莓派3连接
TX–RX
RX–TX
GND–GND
- TELEM1和TELEM2都是串口,从左到右分别是VC TXD RXD 未知 未知 GND
测试结果
参考
Pixhawk—通过串口方式添加一个自定义传感器(超声波为例) —— FreeApe
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)