提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
本篇文章是作者在学习ros时根据自己的认识所写的代码,主要是基于话题<geographic_msgs/GeoPoseStamped.h>进行gps经纬高的发布以及基于话题<sensor_msgs/NavSatFix.h>进行gps经纬高的订阅。如有错误,敬请指正。
一、话题认识
1.订阅话题sensor_msgs::NavSatFix
话题相关变量如以下链接所示 :
http://sensor_msgs/NavSatFix.msg
我们可以 先声明一个回调函数进行经纬高的打印。
sensor_msgs::NavSatFix current_gps;//创建全局变量获取当前经纬高信息
void pos_cb(const sensor_msgs::NavSatFix::ConstPtr& msg) {
current_gps = *msg;
ROS_INFO("%f %f %f\n",current_gps.longitude,current_gps.latitude,current_gps.altitude);
}
然后订阅这个话题并将回调函数写入。
ros::Subscriber gps_sub = nh.subscribe<sensor_msgs::NavSatFix>
("mavros/global_position/global",10,pos_cb);
2.发布话题 geographic_msgs::GeoPoseStamped
话题相关变量如以下链接所示 :http://docs.ros.org/en/api/geographic_msgs/html/msg/GeoPoseStamped.html
发布这个话题:
ros::Subscriber gps_sub = nh.subscribe<sensor_msgs::NavSatFix>
("mavros/global_position/global",10,pos_cb);
发布经纬高的例子:
geographic_msgs::GeoPoseStamped pose;
pose.pose.position.latitude=47.397751;
pose.pose.position.longitude=8.545607;
pose.pose.position.altitude=650.321901;
二、完整代码
/**
* @file offb_node.cpp
* @brief 指定经纬高进行指点飞行,其中高度为平均海拔高度。
*/
#include <ros/ros.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
#include <math.h>
#include <sensor_msgs/NavSatFix.h>
#include <geographic_msgs/GeoPoseStamped.h>
sensor_msgs::NavSatFix current_gps;//创建全局变量获取当前经纬高信息
void pos_cb(const sensor_msgs::NavSatFix::ConstPtr& msg) {
current_gps = *msg;
ROS_INFO("%f %f %f\n",current_gps.longitude,current_gps.latitude,current_gps.altitude);
}
mavros_msgs::State current_state; // 创建全局变量
// 订阅无人机状态的回调函数将状态信息赋值给全局变量
void state_cb(const mavros_msgs::State::ConstPtr& msg) {
current_state = *msg;
}
int main(int argc, char** argv)
{
int Time_k=1;//sample time
int k=0;
//float w=0.1;
ros::init(argc, argv, "offb_node_sin");//初始化
ros::NodeHandle nh;//定义节点
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Subscriber gps_sub = nh.subscribe<sensor_msgs::NavSatFix>
("mavros/global_position/global",10,pos_cb);
ros::Publisher local_pos_gps_pub = nh.advertise<geographic_msgs::GeoPoseStamped>
("mavros/setpoint_position/global", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
//the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
// wait for FCU connection
while (ros::ok() && !current_state.connected) {
ros::spinOnce();
rate.sleep();
}
geographic_msgs::GeoPoseStamped pose;//实例化一个pose函数
//pose.pose.position.latitude=47.397751;//初始点的经纬高
//pose.pose.position.longitude=8.545607;
//pose.pose.position.altitude=650.321901;
// send a few setpoints before starting
// 在切换到offboard模式之前,你必须先发送一些期望点信息到飞控中。 不然飞控会拒绝切换到offboard模式。
for (int i = 100; ros::ok() && i > 0; --i) {
local_pos_gps_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
//进入offboard模式
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
//arm解锁
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();//将上一次发送请求的时间改为当前
pose.header.stamp=ros::Time::now();//
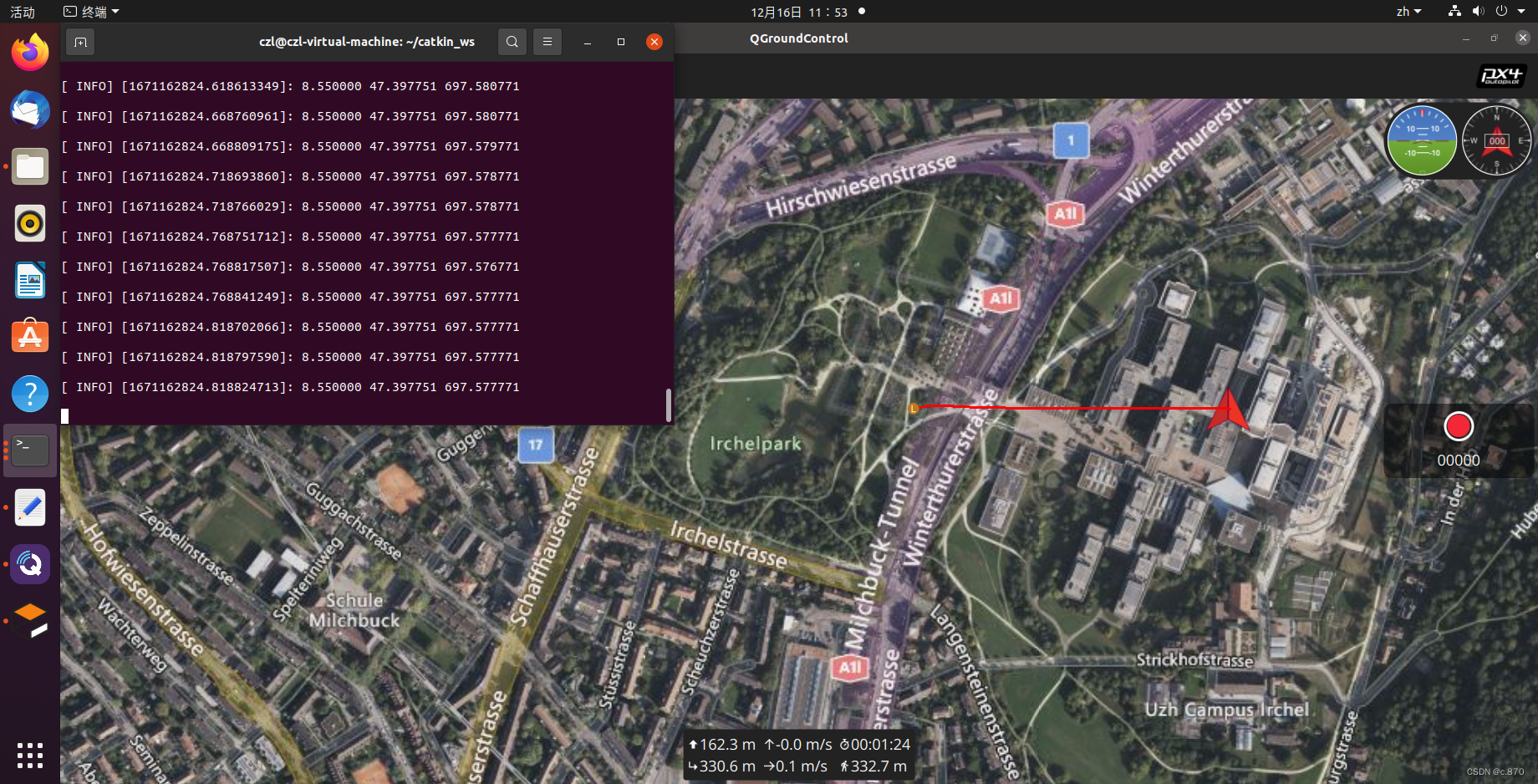
//设置的目标经纬高:47.397751-8.55-650.321901(高度有一个恒定47m的差异,暂时没搞明白原因)
while (ros::ok())
{
Time_k++;
if(pose.pose.position.longitude<8.55)
{
pose.pose.position.latitude=47.397751;
pose.pose.position.longitude=pose.pose.position.longitude+0.01*k;
pose.pose.position.altitude=650.321901;
k++;
}
else
{
pose.pose.position.longitude=8.55;
}
if (current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))) {
if (set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent) {
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
}
else {
if (!current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))) {
if (arming_client.call(arm_cmd) &&
arm_cmd.response.success) {
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
}
local_pos_gps_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}
以下为仿真结果展示
总结
以上就是gps指点飞行的全部内容。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)