一、mavros 安装配置
在安装之前,请先更新软件库:
sudo apt-get update
sudo apt-get upgrade
遇到问题
无法安全地用该源进行更新,所以默认禁用该源。
N: 参见 apt-secure(8) 手册以了解仓库创建和用户配置方面的细节。
E: 仓库 “https://mirrors.tuna.tsinghua.edu.cn/ubuntu bionic-updates Release” 不再含有 Release 文件。
N: 无法安全地用该源进行更新,所以默认禁用该源。
N: 参见 apt-secure(8) 手册以了解仓库创建和用户配置方面的细节。
E: 仓库 “https://mirrors.tuna.tsinghua.edu.cn/ubuntu bionic-backports Release” 不再含有 Release 文件。
解决办法
然后安装mavros
sudo apt-get install ros-melodic-mavros ros-melodic-mavros-extras
wget https:
sudo chmod a+x ./install_geographiclib_datasets.sh
sudo bash ./install_geographiclib_datasets.sh #这一步时间稍长一些,请耐心等待
二、PX4配置
踏破铁鞋无觅处,得来全部费功夫
整了两天,先是自己下PX4-Autopilot这个包再铐到ubuntu下,发现下不全,然后想着在linux下整个梯子吧,发现端口配置对我也不是很容易。寻寻觅觅,遇见了这个博主
他把自己配好的文件分享出来了,拿来一试成了。感谢感谢(博文)
直接下载
链接: https://pan.baidu.com/s/10qUpCH-oWAm1HCiB5A-iIw 密码: ed0t
如果直接下载压缩包,可以先解压,然后进入PX4-Autopilot目录下,执行
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts
/install_geographiclib_datasets.sh
sudo bash ./install_geographiclib_datasets.sh
bash ./Tools/setup/ubuntu.sh
git submodule update --init --recursive
然后返回到PX4-Autopilot目录下,执行
sudo apt-get update
sudo apt-get upgrade
make px4_sitl_default gazebo_plane
然后设置环境变量
(1).运行gedit ~/.bashrc 打开.bashrc文件
gedit ~/.bashrc
(2).把下面代码粘贴复制到该文件的最后面
source ~/PX4-Autopilot/Tools/setup_gazebo.bash ~/PX4-Autopilot/ ~/PX4-Autopilot/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4-Autopilot
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4-Autopilot/Tools/sitl_gazebo
(3).完成之后记得 source ~/.bashrc 一下
source ~/.bashrc
最后运行launch文件
cd ~/ PX4-Autopilot
roslaunch px4 mavros_posix_sitl.launch
三、检查通信是否成功
重新打开一个终端运行下面命令
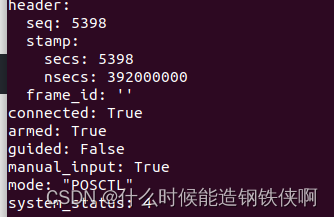
rostopic echo /mavros/state
若connected: True,则说明MAVROS与SITL通信成功。如果是false,一般是因为.bashrc里的路径写的不对,请仔细检查。如果一直false,则重新在配置PX4一遍试试。
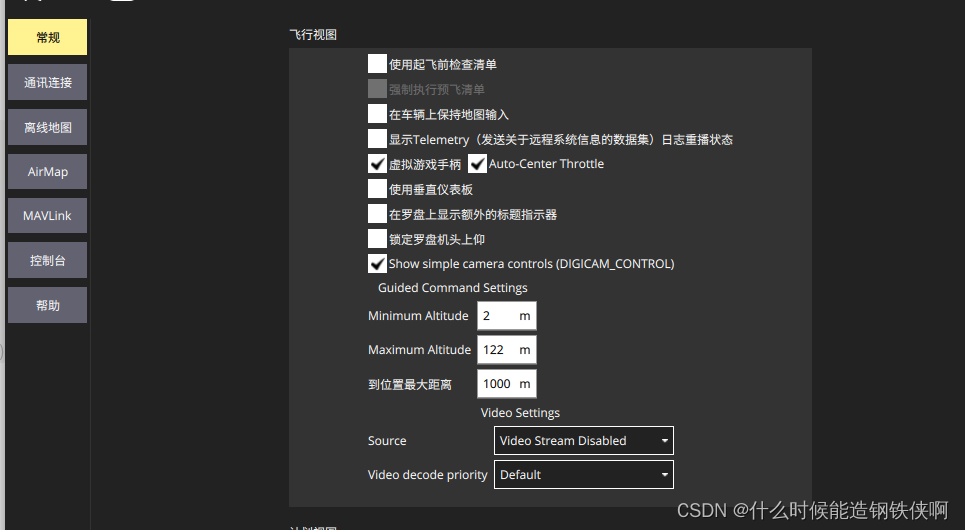
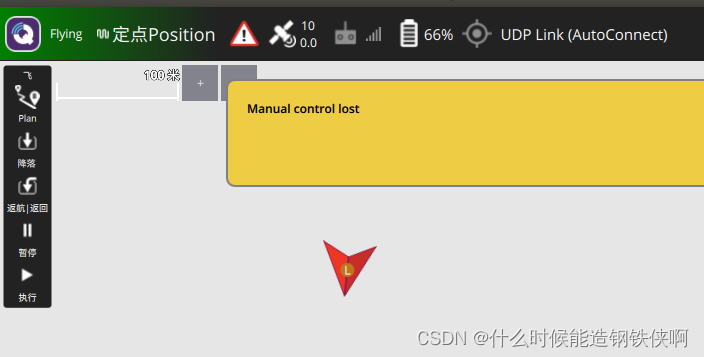
四、QGroundControl 起飞返航
打开QGroundControl 将虚拟游戏手柄点上对号,点击起飞和返航
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)