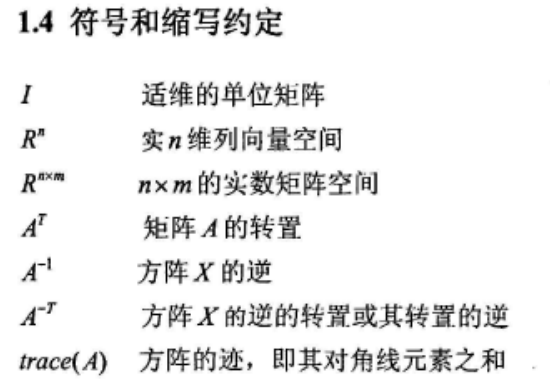
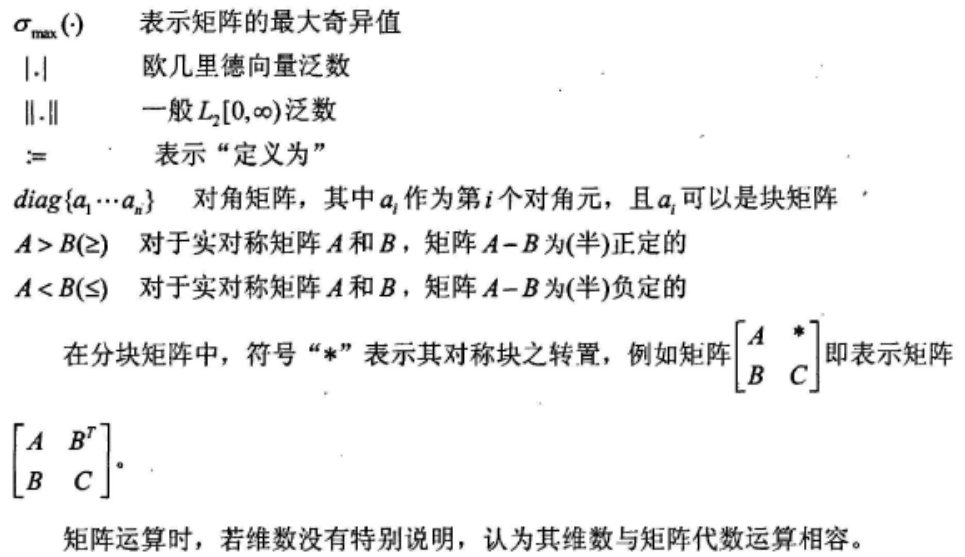
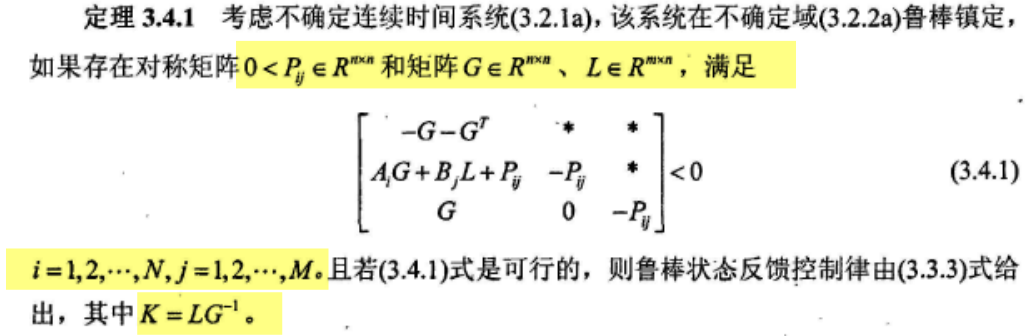
矩阵P>0,几矩阵正定 星号 * 表示
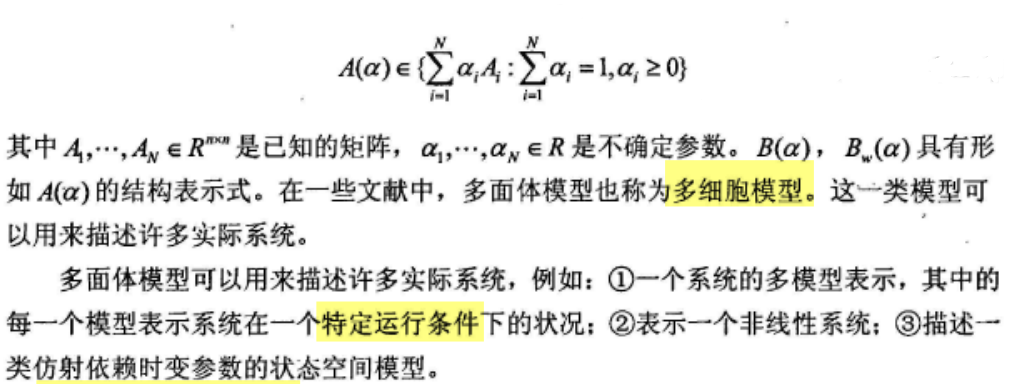
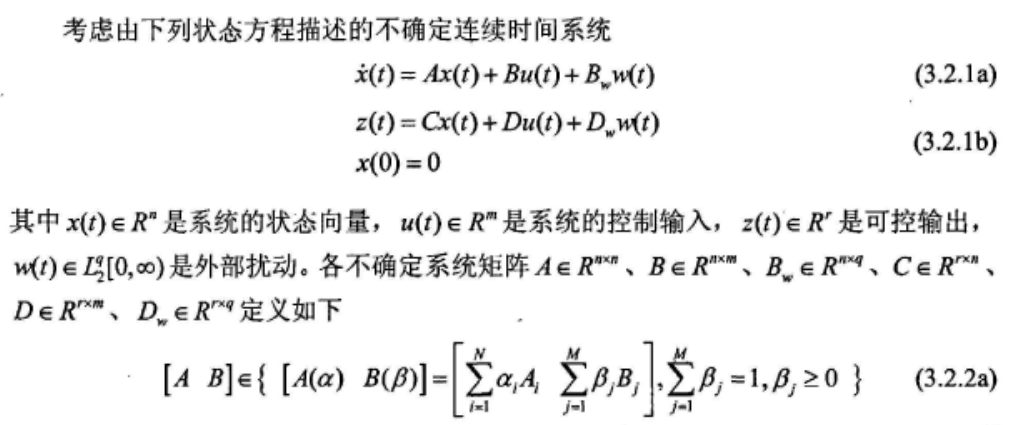
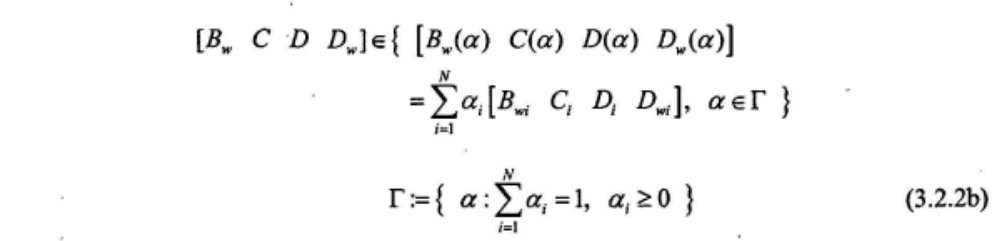
1. 结构不确定模型 2. 多面体模型 3.仿射参数依赖模型 略…自行百度
以下三条任意一条满足啧系统稳定:
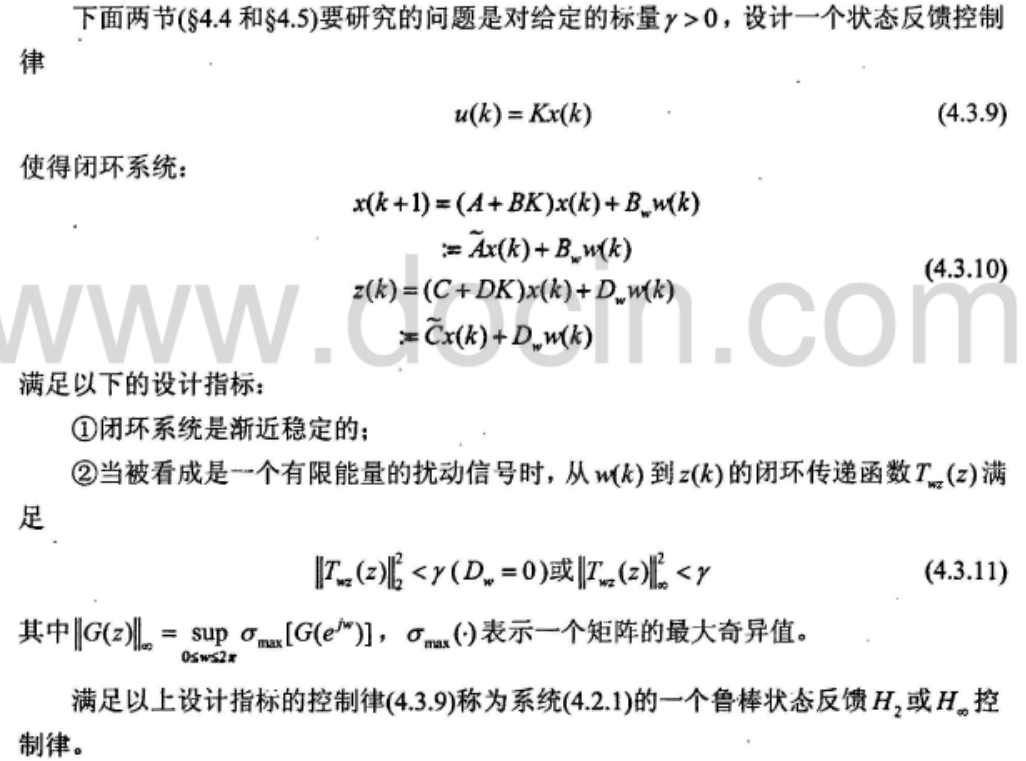
H无穷性能指标的定义:
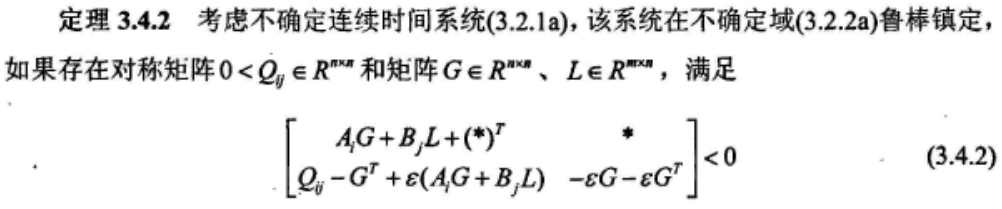
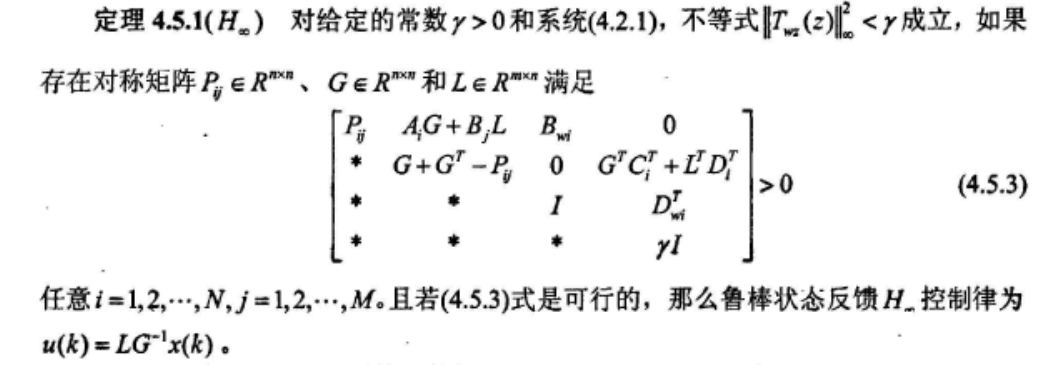
状态反馈形式:
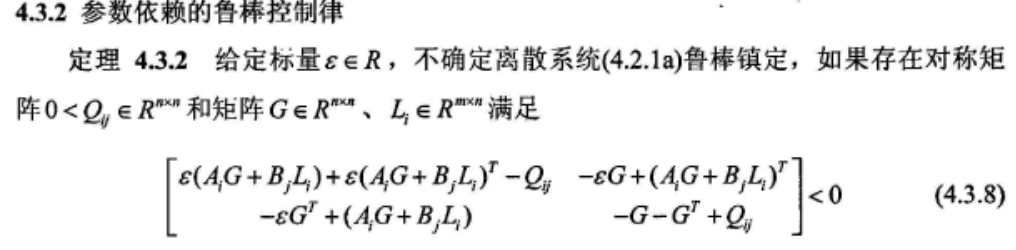
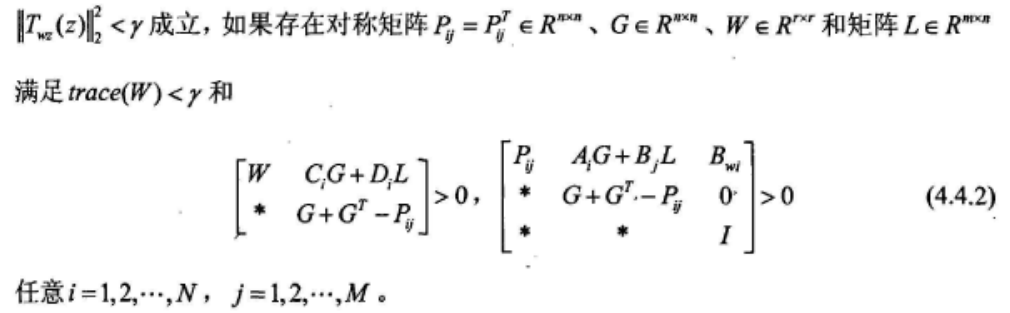
判据(1): 判据(2): PS: 判据(1)和(2)等价。
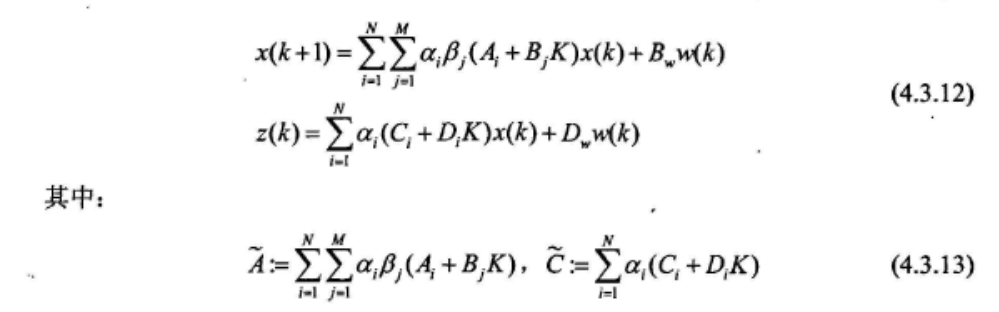
其中:
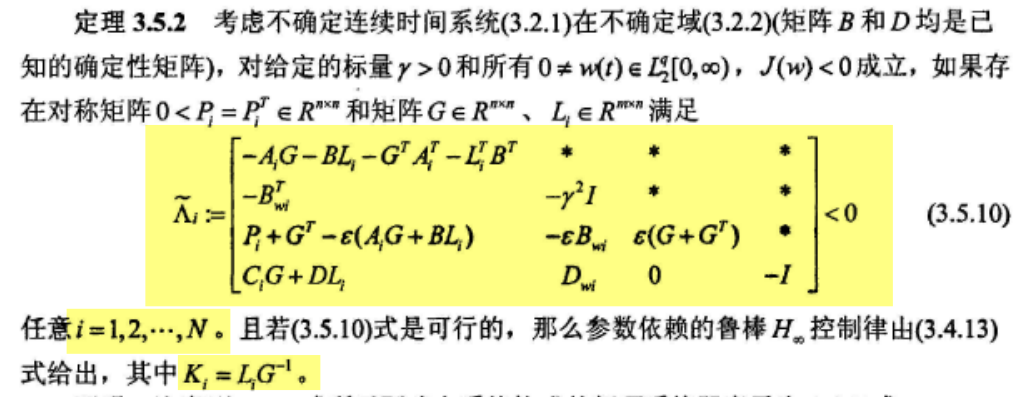
参数相关控制率:
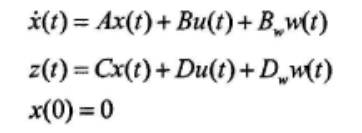
闭环系统模型:
matlab 自带的LMI工具箱
Yalmip工具箱(推荐)