首先我们要明白电机的原理
电机 简单来说就是 实现电能与机械能相互转换的电工设备
那么我们经常使用的直流电机原理就是:
电生磁:通电导线会产生磁场
也就是电磁感应 旋转磁场带动转子转动。
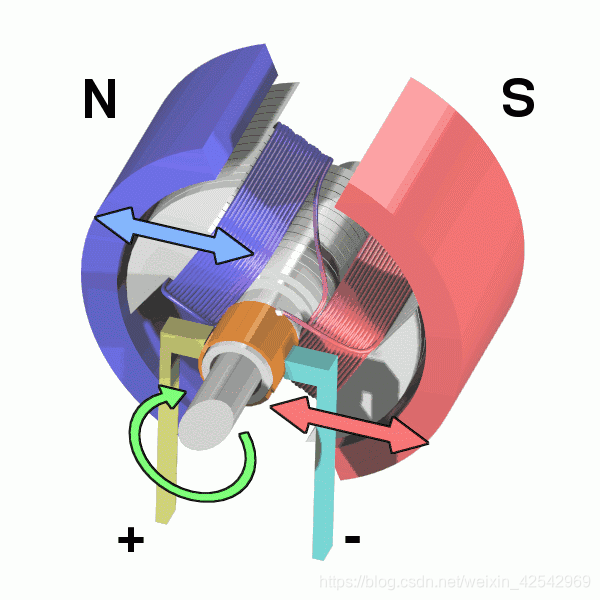
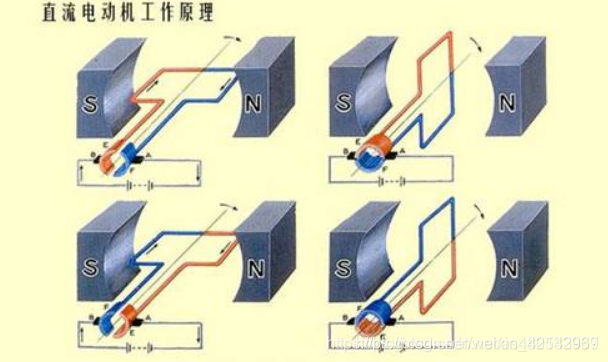
电动机是由定子和转子组成,一个产生旋转磁场,一个为磁极,电机的转子(轴承)就转起来了。
这便实现了 电能->磁能->机械能的转换
下面两个图可以更直观的理解:
那么关于电机我们不做深究,
我们只需要知道,电机的本质,就是线圈 也就是电感元件
同时我们知道电感有防止电流突变的作用
关于PWM的原理请参照这篇博客:
https://blog.csdn.net/as480133937/article/details/103439546
那么,我们来浅析一下:
通电导线在磁场中受到的力称为安培力。
而安培力的公式:
F=BIL
在其他条件不变的情况下,控制其通过的电流即控制安培力的大小
那么,电机的电阻R 是基本不变的 电流I 就等于 I = U/R
F= BLU/R
在R B L不变的情况 控制安培力的大小,本质就是修改供电电压的大小
我们也就知道,控制电机转速的本质就是给电机供不同的供电电压
电压越大,电机转速越快
那么我们知道 PWM的本质就是脉宽调制,通过输出不同的占空比,从而将直流电压转换成不同电压值的模拟信号
原理:
占空比可以实现对电机转速的调节,我们知道,占空比是高电平在一个周期之中的比值,高电平的所占的比值越大,占空比就越大,对于直流电机来讲,电机输出端引脚是高电平电机就可以转动,当输出端高电平时,电机会转动,但是是一点一点的提速,在高电平突然转向低电平时,电机由于电感有防止电流突变的作用是不会停止的,会保持这原有的转速,以此往复,电机的转速就是周期内输出的平均电压值,所以实质上我们调速是将电机处于一种,似停非停,似全速转动又非全速转动的状态,那么在一个周期的平均速度就是我们占空比调出来的速度了,
总结: 在电机控制中,电压越大,电机转速越快,而通过PWM输出不同的模拟电压,便可以使电机达到不同的输出转速
当然,在电机控制中,不同的电机都有其适应的频率 频率太低会导致运动不稳定,如果频率刚好在人耳听觉范围,有时还会听到呼啸声。频率太高的电机可能反应不过来
正常的电机频率在 6-16kHZ之间为好
输出的电压就不同,电机转速就不同。那我们可以知道,通过滑动变阻器或者更换不同电压的电源都可以实现电机的调速,但是在实际应用中显然pwm更方便些。
专业一点的话就是:
所谓PWM就是脉宽调制器,通过调制器给电机提供一个具有一定频率的脉冲宽度可调的脉冲电。脉冲宽度越大即占空比越大,提供给电机的平均电压越大,电机转速就高。反之脉冲宽度越小,则占空比越越小。提供给电机的平均电压越小,电机转速就低。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)