首先使用 rospack find tf2_tools 查看是否安装了 tf2_tools,如果没有则安装
但直接采用 sudo apt install tf2_tools 是无法安装成功的,会显示 E: 无法定位软件包 tf2_tools

应该采用以下语句进行安装
sudo apt install ros-noetic-tf2-tools(因为我的是 noetic 版本)
或者
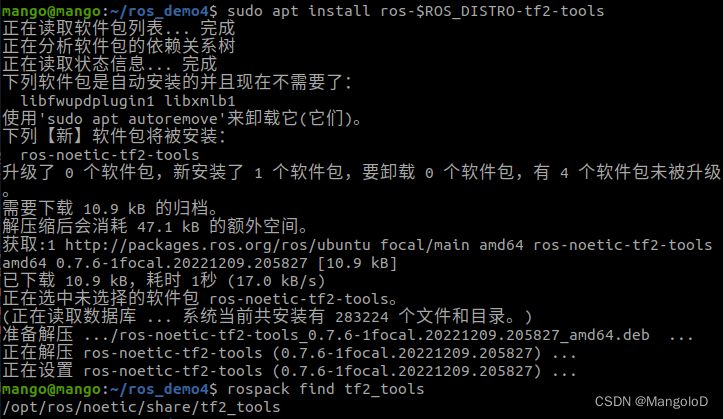
sudo apt install ros-$ROS_DISTRO-tf2-tools
再次查看,可以看到已经安装成功了,并且显示了安装路径
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)