
这期开始会不断更新一些软件安装使用过程中的一些问题,帮着各位老师快速的实现软件的使用,在安装过程中总是出现这样那样的问题,我们就将基于此类问题,总结一些解决办法,帮助大家快速成长!今天我们要说的是 BOOST,在使用软件包velocyto.R 依赖这个Boost,所以我们就说说怎么安装?
Boost库介绍
Boost是一个功能强大、构造精巧、跨平台、开源并且完全免费的C++程序库,在1998年由Beman G.Dawes发起倡议并建立。使用了许多现代C++编程技术,内容涵盖字符串处理、正则表达式、容器与数据结构、并发编程、函数式编程、泛型编程、设计模式实现等许多领域,极大地丰富了C++的功能和表现力,能够使C++软件开发更加简洁、优雅、灵活和高效。
Boost库可以与C++标准库完美共同工作,并且为其提供扩展功能。大部分Boost库功能的使用之需要包括相应的头文件即可,少数需要连接库。
Windows 环境安装
下载Boost
Boost社区根据目标平台的操作提供了Linux和Windows版本,支持预编译版本和源代码版本的安装。
# 官方网站
https://www.boost.org/
# 下载地址
https://www.boost.org/users/download/
# 预编译版本下载地址
https://sourceforge.net/projects/boost/files/boost-binaries/
到官网下载boost,选择windows->boost_1_76_0.zip

解压
解压到D:\boost目录下(这个解压到自己认为合适的目录就行,尽量不含中文路径)。
运行命令行
可以是cmd,可以是Vs2019包含的x64 Native Tools Command Prompt for VS 2019,也可以是Developer Command Prompt for VS2019
输入命令 cd D:\boost\boost_1_76_0
如果发现cd命令怎么也进不去指定文件夹,其实是没先指定盘符,应该先输入D: 回车,然后会变成D:\>, 然后你再cd
C:\Users\zhaoh> cd D:\boost\boost_1_76_0
C:\Users\zhaoh>D:
D:\boost\boost_1_76_0>cd
cd的意思是切换同一个磁盘底下的目录,所以不能切换到D盘 要切换直接输入D:就可以了(不带cd)
输入bootstrap.bat运行
D:\boost\boost_1_76_0>bootstrap.bat
然后在D:\boost\boost_1_76_0目录下我们会发现新生成了一个名为b2.exe的文件
命令输入b2.exe执行b2.exe文件
这个过程用时较长,需要等待一阵。此过程将默认依据系统已经安装好的编译工具等编译对应的Lib文件、头文件等。完成后在文件夹D:\boost\boost_1_76_0\stage\lib下生成.dll及.lib文件。D:\boost\boost_1_76_0\bin.v2是编译产生的临时目录,可删除。
验证开发环境
让我们来编写一个简单的boost应用程序来验证开发环境
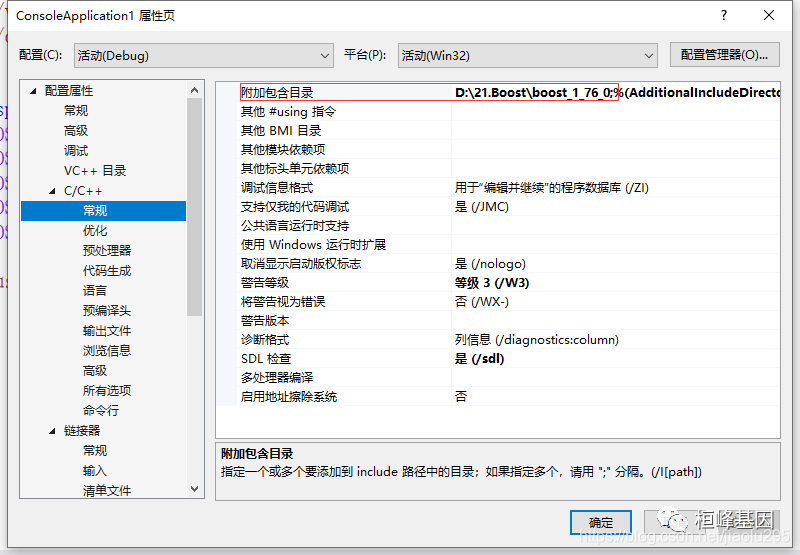
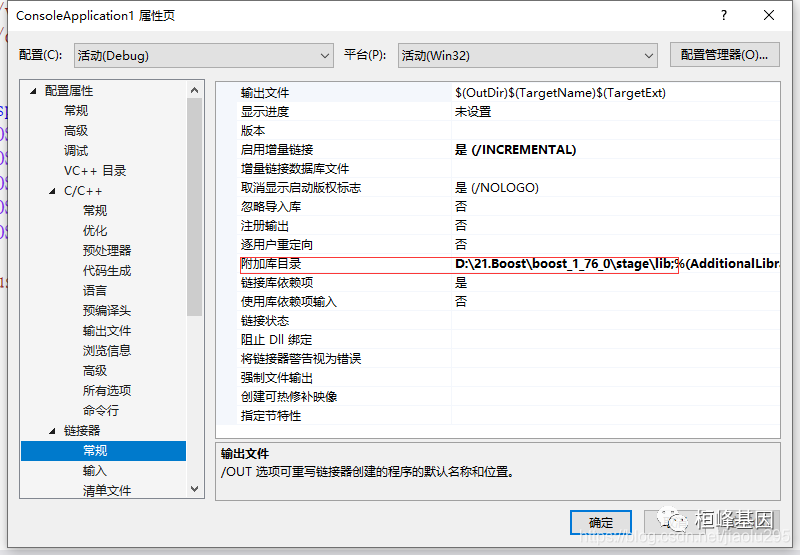
在编写代码前要在项目->属性->c/c++ ->常规 “附加包含目录”和链接器->常规->“附加库目录”中做如下配置,添加之前生成的boost lib目录。
测试代码如下:
#include<iostream>
#include<stdio.h>
#include<boost/version.hpp> //包含boost头文件
#include<boost/config.hpp>
int main() {
using namespace std;
cout << BOOST_VERSION << endl;
cout << BOOST_LIB_VERSION << endl;
cout << BOOST_PLATFORM << endl;
cout << BOOST_COMPILER << endl;
cout << BOOST_STDLIB << endl;
system("pause");
return 0;
}
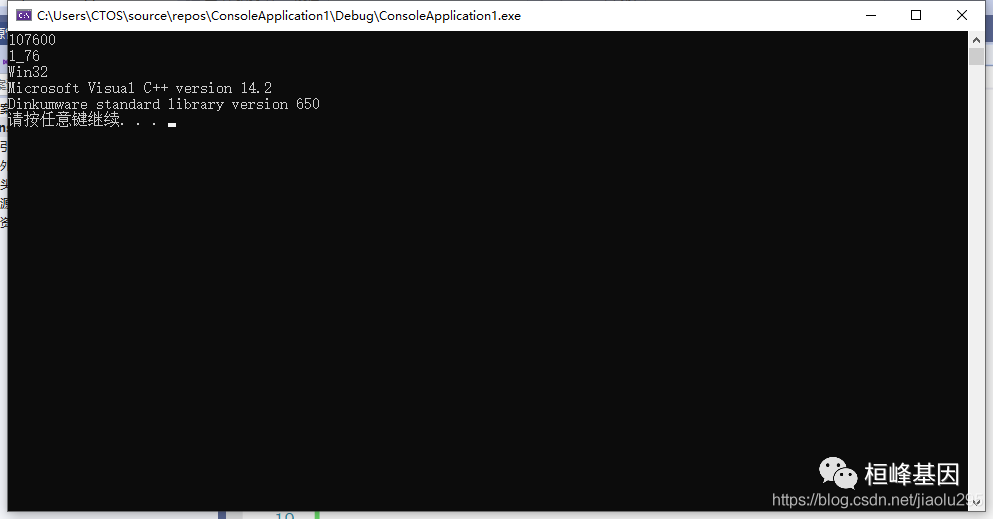
运行结果如下:
Linux环境安装
这里介绍使用源代码编译安装的方式,以Boost_1.76.0为例
1. 下载源代码
wget https://boostorg.jfrog.io/artifactory/main/release/1.76.0/source/boost_1_76_0.tar.bz2 --no-check-certificate
2. 编译安装
tar xvf boost_boost_1_76_0.tar.bz2
cd boost_boost_1_76_0_0
./boostrap.sh
./b2 --buildtype=complete install
boost有大量的库其实可以选择安装指定的库,这里为了方便我选择完全安装。
安装boost库时我直接按照默认的路径安装,最后会在/usr/local/lib目录下安装所有编译的libboost*库。如果需要指定路径,可以在编译时添加"–prefix=xxx"的路径参数,这样的话在安装后还需要手动将该路径添加到环境变量中。
如果系统中有多个python版本,可以通过"–with-python=python*"来指定python版本,默认情况下使用系统默认的版本。
桓峰基因,铸造成功的您!
未来桓峰基因公众号将不间断的推出单细胞系列生信分析教程,
敬请期待!!
桓峰基因和投必得合作,文章润色优惠85折,需要文章润色的老师可以直接到网站输入领取桓峰基因专属优惠券码:KYOHOGENE,然后上传,付款时选择桓峰基因优惠券即可享受85折优惠哦!https://www.topeditsci.com/
有想进生信交流群的老师可以扫最后一个二维码加微信,备注“单位+姓名+目的”,有些想发广告的就免打扰吧,还得费力气把你踢出去!
