摘自:https://zhuanlan.zhihu.com/p/115283894
自抗扰控制理论(一)ADRC的原理

Chenglin Li
厦门大学 飞行器设计硕士在读
0 相关参考链接
Chenglin Li:自抗扰控制理论(二)ADRC控制多变量耦合系统
Chenglin Li:自抗扰控制理论(三)ADRC控制二阶系统
Chenglin Li:自抗扰控制理论(四)ADRC控制串级系统
Chenglin Li:自抗扰控制理论(五)ADRC控制并级系统
Chenglin Li:自抗扰控制理论(六)状态观测器
Chenglin Li:自抗扰控制理论(七)自抗扰设计流程
Chenglin Li:自抗扰控制理论(八)扩张状态观测器跟踪误差分析
1 ADRC控制原理[1]
1.1 跟踪微分器(TD)
(1)目的
事先安排过渡过程,提取含有随机噪声的输入信号及其微分信号;
解决PID超调性、快速性之间的矛盾;
(2)数学表达形式

(3)TD结构图

(4)TD滤波功能展示


1.2 扩张状态观测器(ESO)
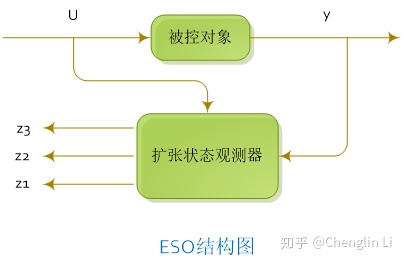
(1)功能
估计系统内外扰动的实时作用值,并在反馈中给予补偿,用补偿的方法消除扰动的影响,从而具有抗干扰的作用。
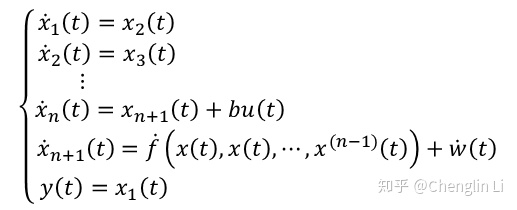
(2)ESO的一般设计流程


![[公式]](https://img-blog.csdnimg.cn/img_convert/aaa0f162b58058cec2a8c51ff81640d8.png)

(3)ESO结构图
二阶系统的ESO

n阶系统的ESO
1.3 误差补偿控制器
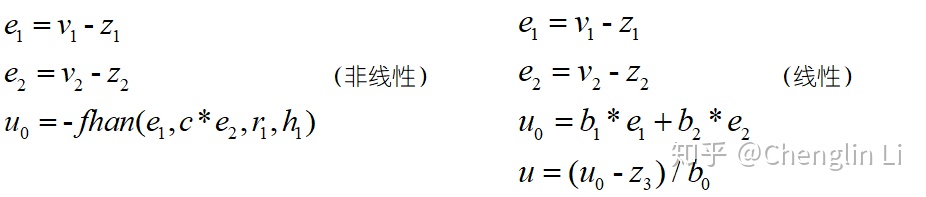
(1)功能
扰动抑制和消减:根据TD得出的给定信号和信号的微分,与ESO观测到的系统输出、输出导数的误差,进而进行控制和扰动补偿。
(2)数学表达式
1.4 ADRC整体模拟框图


2 线性自抗扰控制(LADRC)原理[2]
不考虑滤波功能的跟踪微分器TD,重新配置ESO和控制器的极点,则可以得到LADRC。
(1)设计LESO
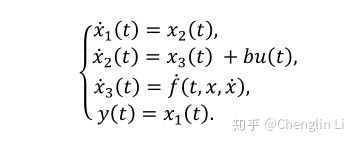
考虑单输入单输出的二阶系统
其中f是系统总扰动,u是控制量,y是被控输出,x是状态变量,b是控制器增益。假设f可微,将其扩展为一个新的状态量,可得
其中 。由Luenberger提出的状态观测器理论,解决了在确定性条件下受控系统的状态重构问题,LESO方程如下

对LESO方程拉氏变换可得
LESO对应的特征方程
观测器特征方程也可以直接从矩阵 推出。将观测器的3个极点统一配置到s平面左半实轴 处
从而可以确定观测器增益
(2)设计控制器
在ESO估计出扰动并补偿后,控制器本质上是一个PD控制器。
即
v是设定被跟踪的信号值,e是跟踪误差, 是虚拟控制量, 是控制器增益。
根据上式计算控制器 传递函数
特征方程如下
将控制器的两个极点配置到s平面左半实轴 处,从而可以确定控制器增益
得到控制器增益为
上述过程即为LADRC的设计流程。
3 ESO跟踪误差分析

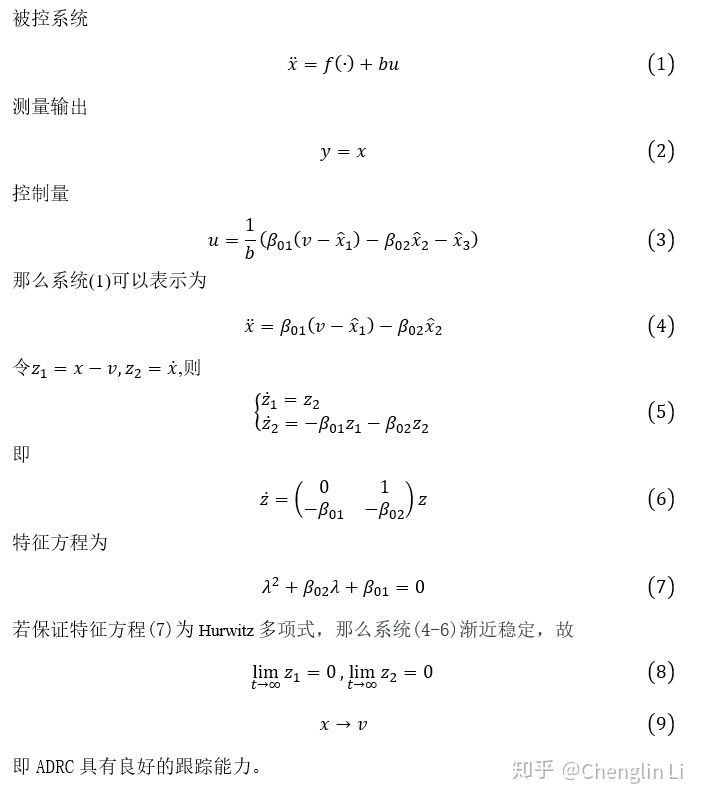
4 ADRC跟踪性能分析
——2020.04.01——
参考
- ^韩京清.自抗扰控制技术——估计补偿不确定因素的控制技术[M].国防工业出版社:北京,2008:1-end.
- ^朱斌.自抗扰控制入门[M].北京航空航天大学出版社:北京,2017:36-42.
编辑于 07-12
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)