导读: 针对传统的DTC存在的问题进行,本期主要介绍基于滑模控制的永磁同步电机直接转矩控制。
如果需要文中的仿真模型,关注微信公众号:浅谈电机控制,获取。
传统DTC采用两个 Bang-bang 控制器分别对转矩和磁链幅值进行控制,响应快速,对系统参数摄动和外干扰鲁棒性强、但存在较大的磁链和转矩脉动,逆变器开关频率不恒定,低速时系统难以精确控制,以及因转矩脉动引起的高频 噪声等问题。 传统DTC中磁链和转矩脉动过大是因逆变器的实际开关频率不够高,从而导致一个数字控制周期中所选用的有效电压矢量无法与期望的电压矢量-致。
针对这些问题,目前多采用以下几种解决方案:
(1)对传统DTC的开关表加以改进,如增加零电压矢量和矢量细分等;
(2)采用多电平控制功率变换器通过多个空间电压矢量作用于电机,使磁链、转矩平滑,但这增加了系统硬件成本和复杂性。
(3)运用空间电压矢量调制方法使逆变器开关频率恒定,以减小转矩脉动。这种解决方案一般利用PI调节器替代滞环调节器来控制定子磁链和转矩,但特定的PI调节器参数对电机参数、转速和负载变化敏感,存在系统鲁棒性不强的问题。
(4)利用基于滑模控制(SMC)的DTC以期解决传统DTC存在的转矩和磁链脉动较大、逆变器开关频率不恒定等问题。
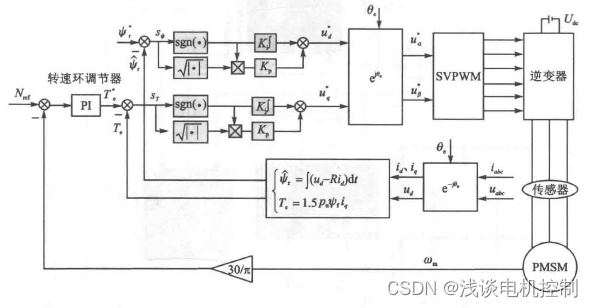
图1基于滑模控制的直接转矩控制框图
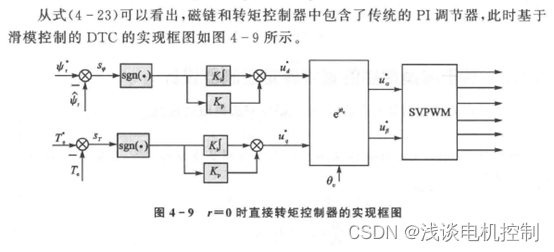
一、基于滑模控制的直接转矩控制器设计


二、仿真搭建

图2基于滑模控制的直接转矩控制系统仿真

图3磁链调节器的仿真模型
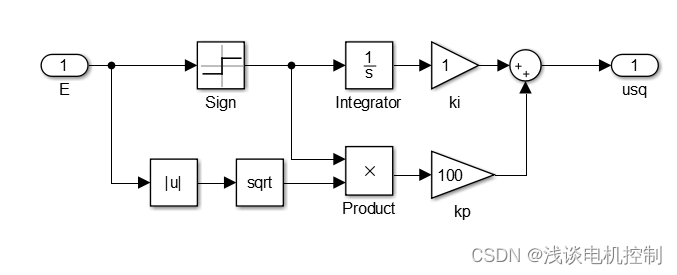
图4转矩调节器的仿真模型
三、仿真分析

图5电机转速波形
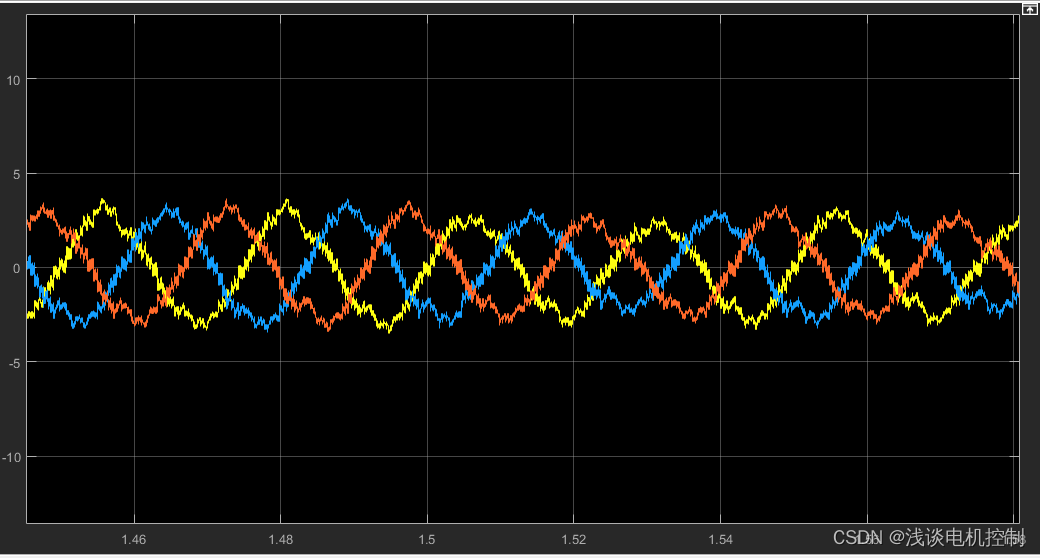
图6三相电流的变化情况
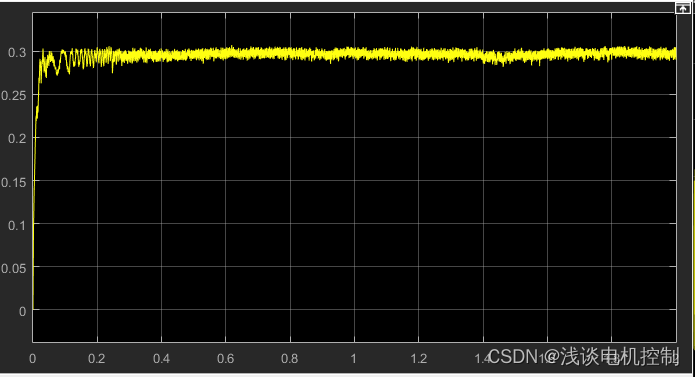
图7磁链的变化情况

图8 基于SVPWM改进的直接转矩控制系统仿真

图9转矩、转速和三相定子电流变化情况
四、总结
仿真波形效果不是很理想,后续会进一步完善。