[非线性控制理论]1_Lyapunov直接方法
[非线性控制理论]2_不变性原理
[非线性控制理论]3_基础反馈稳定控制器设计
[非线性控制理论]4_反馈线性化_反步法
[非线性控制理论]5_自适应控制器(Adaptive controller)
[非线性控制理论]6_滑模控制
[非线性控制理论]7_High gain and High Frequency
[非线性控制理论]8_三种鲁棒控制器的比较
[非线性控制理论]9_非线性控制理论串讲
非线性控制的笔记就算完了,pdf已经上传网盘了,有需要的可以在公众号“王崇卫”回复“DR_CAN笔记”获取了。
DR_CAN视频:
https://www.bilibili.com/video/BV1uW411W7Wx?spm_id_from=333.999.0.0
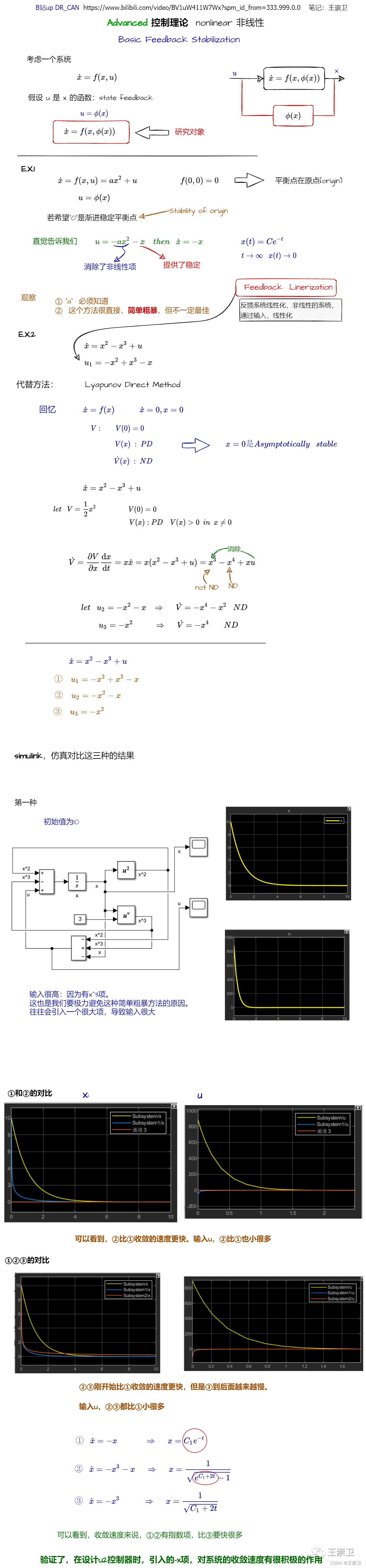
非线性系统的基础反馈稳定控制器设计
-
通过u(输入),将非线性系统线性化的方法。
-
介绍了两种:
-
通过simulink的仿真对比,发现引入-x项,对系统的收敛速度有很积极的作用。