自制肥鲨HDO2电源之功率问题
- 1. 源由
- 2. 分析
-
- 3. 思考
- 4. 验证
- 4.1 PH50 10400mAh充电宝供电
- 4.2 PH80 20000mAh充电宝供电
- 4.3 总结
- 5. 参考资料
1. 源由
前端时间因为肥鲨自带电源盒软线断了,下的一身冷汗(飞行中如果突然黑屏),妥妥的炸机啊!!!
自制电源线一开始用的倒是挺不错的,感觉也还行,但是最近遇到比较奇怪的问题,就是有的时候眼镜启动不起来。
2. 分析
直流供电通常主要问题就是:电压、功率、纹波等问题,而目前遇到的是眼镜有的时候压根无法启动(一闪就灭了)。
2.1 电压检测
模块稳压电压:8.56V,满足肥鲨7 ~ 13V的要求。
2.2 功率检测
这里就看下规格书了,不做实际测试,从规格的角度来说,0.88A < 2.1A,应该已经是两倍了。
肥鲨+野火接收机
- 功率: 4.4VA (最大)
- 电流:0.88A (5V最大电流)
充电宝规格:5V x 2.1A = 10.5 VA
肥鲨规格:7.5V x 0.32A = 2.4 VA

野火接收机规格:5V x 0.4A = 2VA

3. 思考
鉴于这里最让人怀疑的就是功率问题,虽然可以做测试,但是还有一个最为简单的方法就是,使用两个USB供电(这是传统的USB硬盘的策略)。
我们这里做了一个类似的复制操作,将USB1接2.1A的口子,将USB2接1A的口子。
按照规格的角度,现在两个USB口可以提供 2.1 + 1 = 3.1A的最大电流。


4. 验证
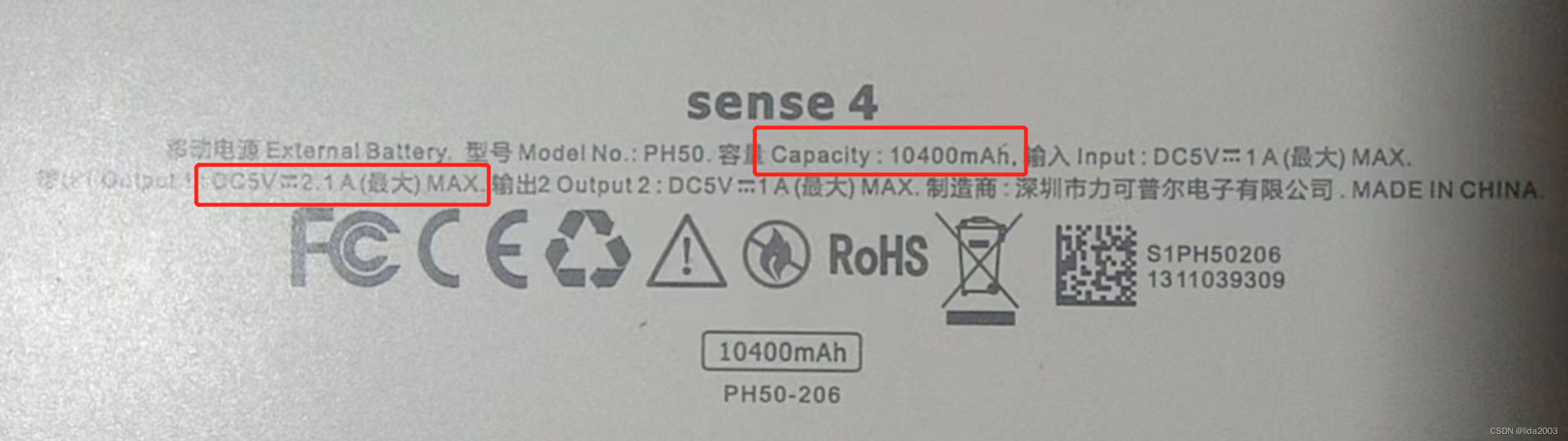
4.1 PH50 10400mAh充电宝供电
成功启动
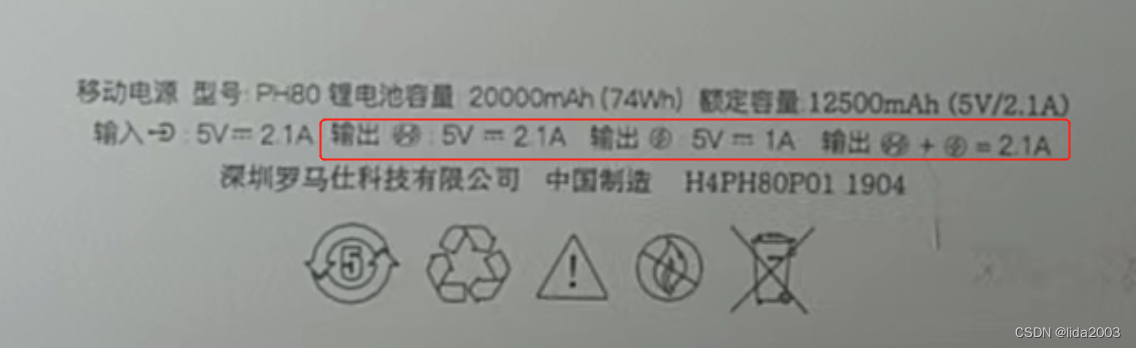
4.2 PH80 20000mAh充电宝供电
启动失败
4.3 总结
通过【PH50 10400mAh充电宝供电成功】和【PH80 20000mAh充电宝供电失败】,我们可以进一步论证:
- 功率问题是导致肥鲨眼镜无法启动的根源
- PH50 两个USB端口输出2.1A + 1A = 3.1A,成功启动
- PH80 两个USB端口输出2.1A(来自规格书),启动失败
- PH50 2.1A USB端口供电,时而正常,时而异常,可能还是2.1A的功率标称存在问题。
本次改动,进一步验证了肥鲨眼镜使用充电宝升压线时,需要考虑购买充电宝输出功率问题。如果不达标的充电宝,还需要考虑两个USB是否能够独立供电问题。
5. 参考资料
【1】自制肥鲨HDO2电源升压延长线
【2】自制肥鲨HDO2电源降压延长线,支持3S~6S动力电池
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)