ArduPilot Kakute F7 AIO DIYF450 without GPS配置
- 1. 源由
- 2. 配置
- 2.1 Kakute F7 AIO相关配置
- 2.1.1 串口规划
- 2.1.2 电传配置
- 2.1.3 GPS配置
- 2.1.4 CRSF接收机配置
- 2.1.5 Compass配置
- 2.1.6 电机配置
- 2.1.7 TX12 遥控器配置
- 3. 实测效果
- 4. 参考资料
- 5. 附录-tf卡日志记录配置
- 6. 附录-电流电压计配置
1. 源由
鉴于GPS模块信号质量未达标,定位存问题,因此想尝试使用ArduPilo进行目视裸奔飞行。
因此,对ArduPilot飞控之DIY-F450计划进行适当调整,测试在原有F450果冻机架上能否比较平稳飞行,为后续电脑地面站控制打下基础。
2. 配置
上述配置方法有别于常规ArduPilot(需要GPS,需要Compass)。固件默认:电机PWM驱动,MAX7456驱动(目前且不上图传)。
2.1 Kakute F7 AIO相关配置
官方介绍Holybro Kakute F7 and KAKUTE F7 AIO
2.1.1 串口规划
- 无人机控制链路:地面站控制和遥控器控制 //本次飞行不需要地面站,存手控+自稳模式
地面站控制:3DR Radio Telemetry V5 433MHz
遥控器控制:CRSF(ELRS)
- 路径规划:GPS(全球定位)和Compass(指南针) // 本次测试飞行不需要GPS和Compass
SERIAL0 -> USB
SERIAL1 -> UART1 (Telem1)
SERIAL2 -> UART2 (GPS)
SERIAL3 -> UART3 (Reserve)
SERIAL4 -> UART4 (Reserve)
SERIAL5 -> UART7 (Reserve)
SERIAL6 -> UART6 (CRSF)
注:SERIAL0 -> USB就不介绍了,默认的USB串口方式进行飞控于计算机的连接。
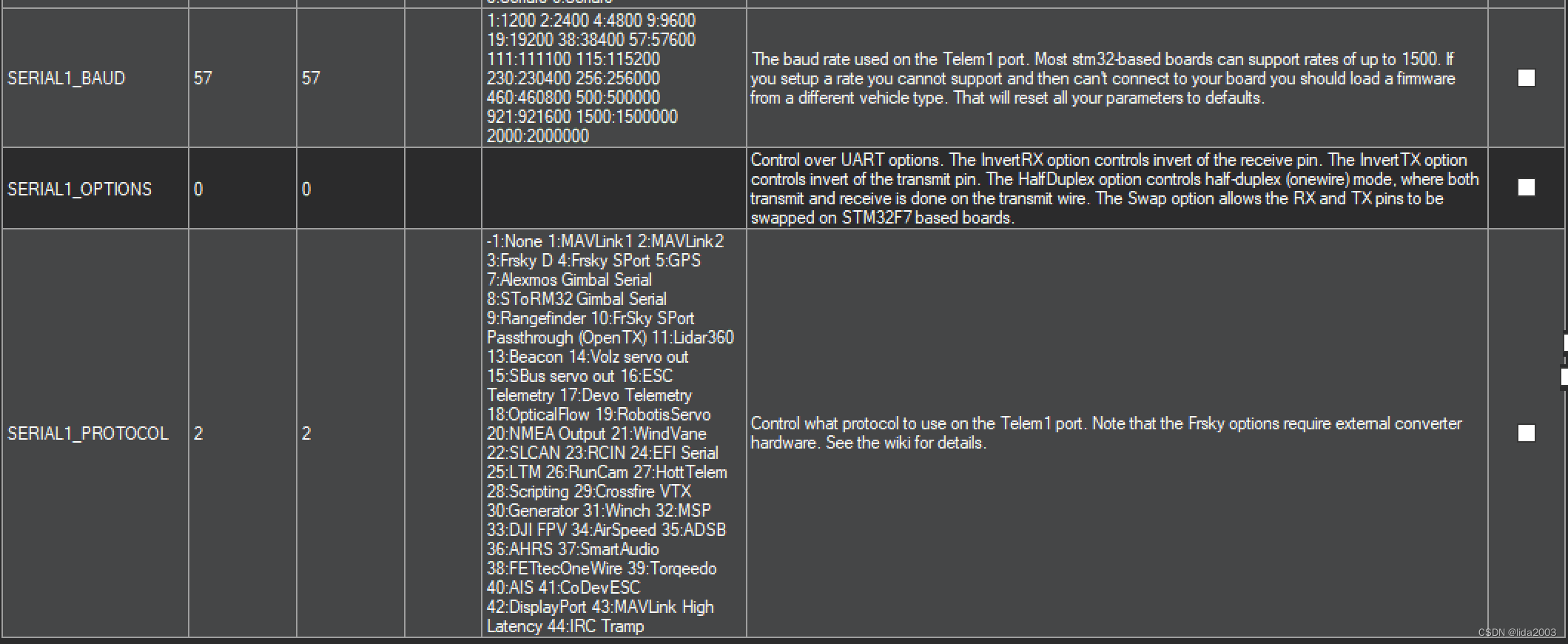
2.1.2 电传配置
SERIAL1 -> UART1 (Telem1)
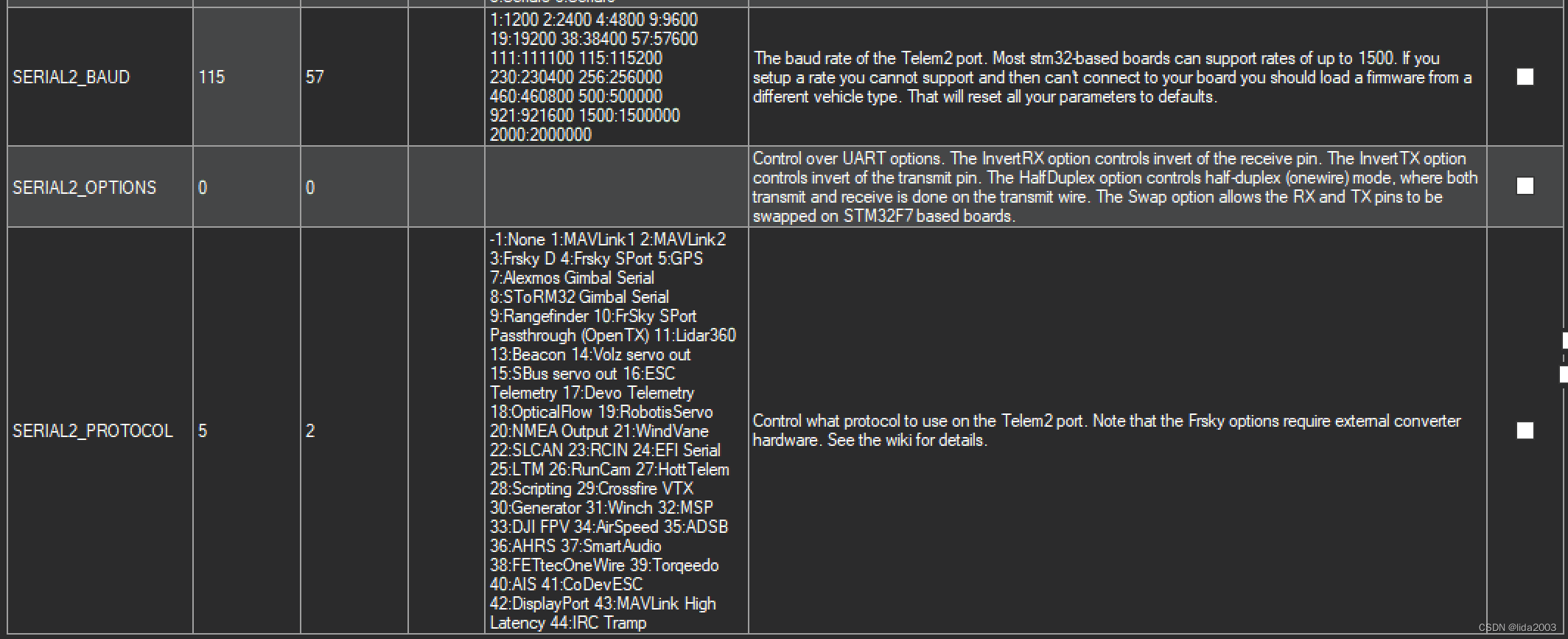
2.1.3 GPS配置
SERIAL2 -> UART2 (GPS)
5Hz GPS刷新率,NMEA+ublox,57600bps不太够,建议选择115200bps。
 自动配置串口
自动配置串口

鉴于本次是without GPS配置方式,因此要特别注意将TYPE自动选择None。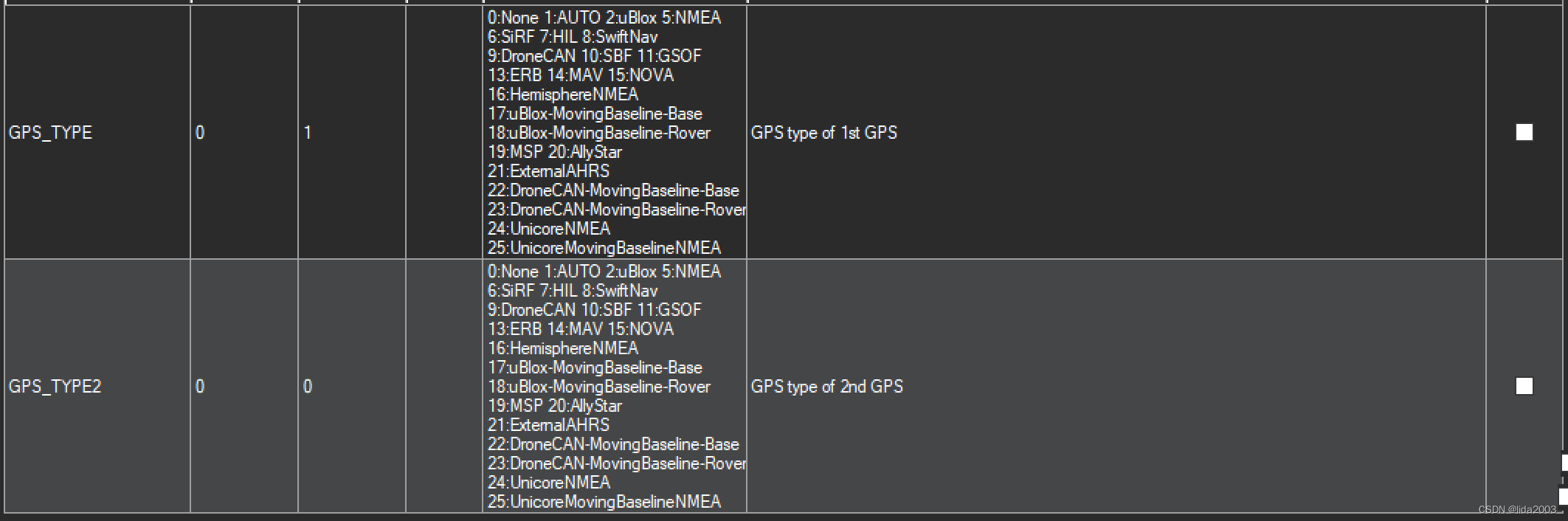
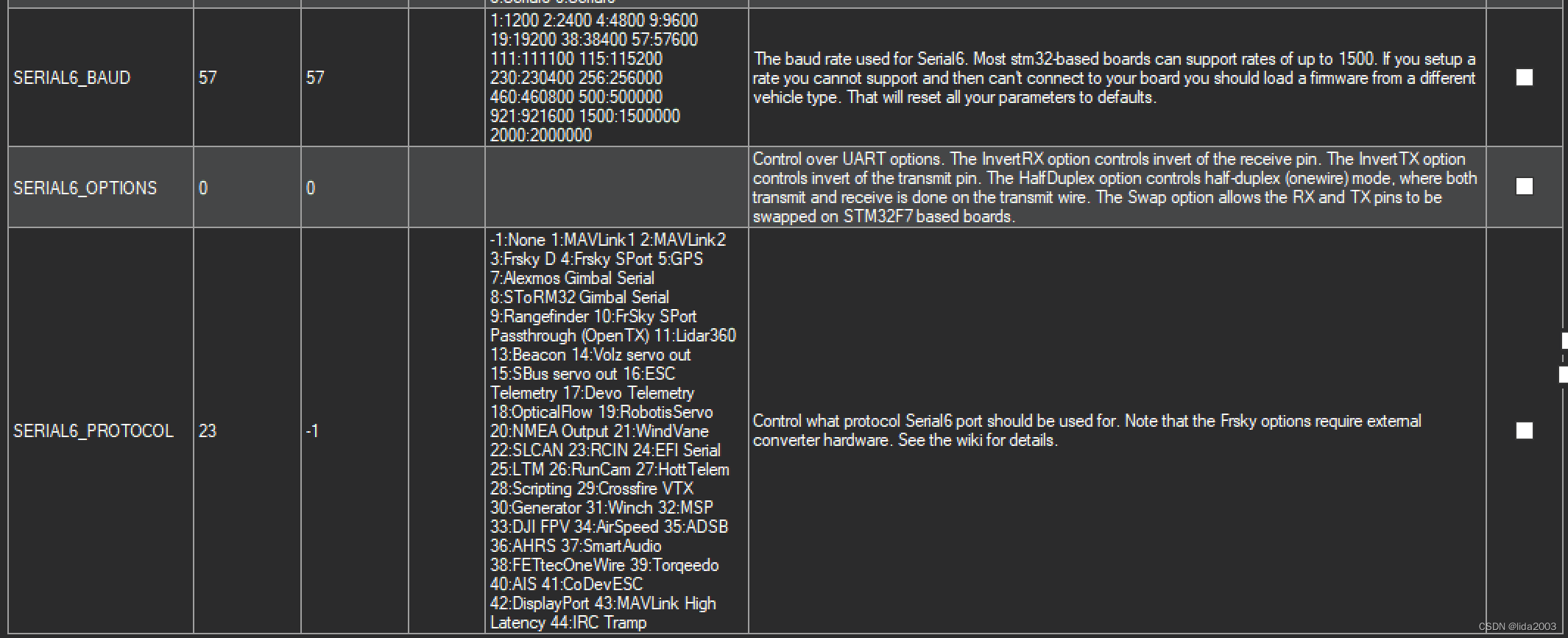
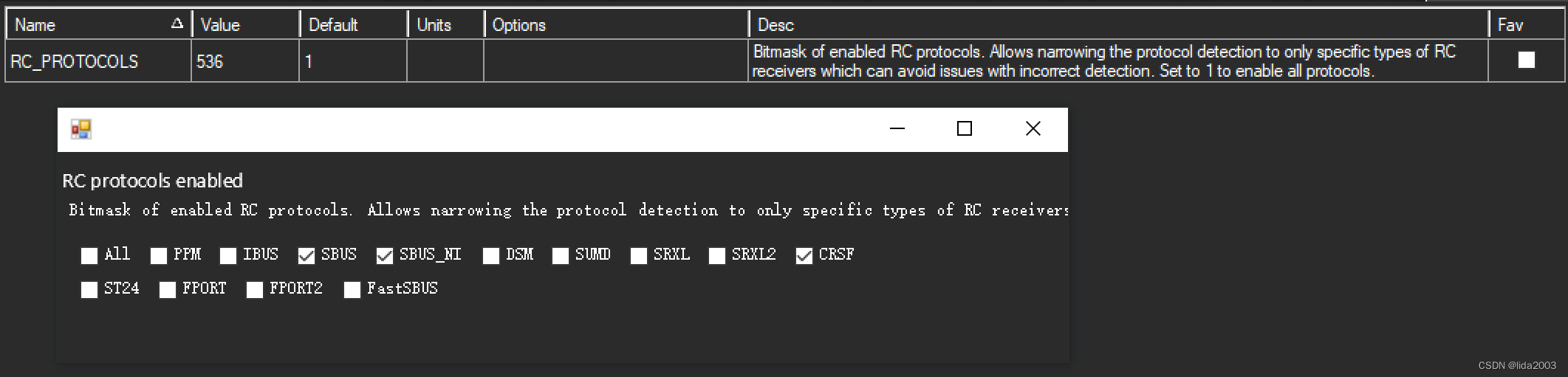
2.1.4 CRSF接收机配置
SERIAL6 -> UART6 (CRSF)
这里波特率并不是太重要,协议一般是会 自协商的,参考:BetaFlight模块设计之二十三:CRSF V3串口速率协商任务分析
Kakute F7 AIO板子必须配置BRD_ALT_CONFIG=1,当使用UART6作为遥控接收机配置的时候,详见:Holybro Kakute F7 and KAKUTE F7 AIO。

这个主要是信号强度显示的问题,固件默认就是3,不过请确认下。

请特别注意CRSF协议是否被选中,因为我们使用的ELRS 915MHz接收机。
如果需要更换飞行模式设置的通道,请配置如下FLT_MODE_CH。

2.1.5 Compass配置
鉴于Kakute F7 AIO板子内部不集成Compass芯片,外部又没有GPS模块(通常带外部Compass),那么必须将指南针取消掉。

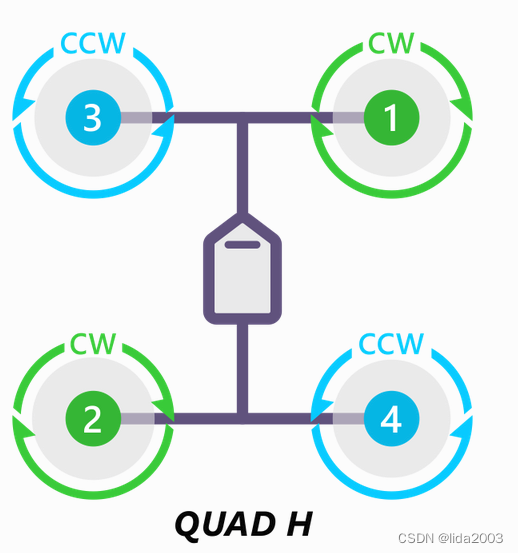
2.1.6 电机配置
请根据Connect ESCs and Motors和Holybro Kakute F7 and KAKUTE F7 AIO配置电机转向和对应控制pin脚。
M1 -> Servo Output 4
M2 -> Servo Output 1
M3 -> Servo Output 2
M4 -> Servo Output 3
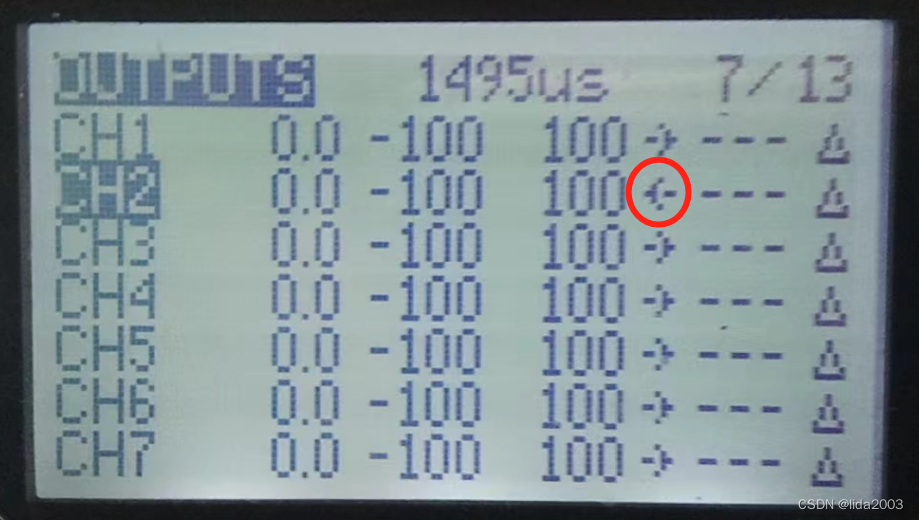
2.1.7 TX12 遥控器配置
实际测试过程发现,按照指南配置后,飞机能正常起飞,但是前后(Pitch)是反向的。因此,需要调整遥控器这端Channel2的正反向。
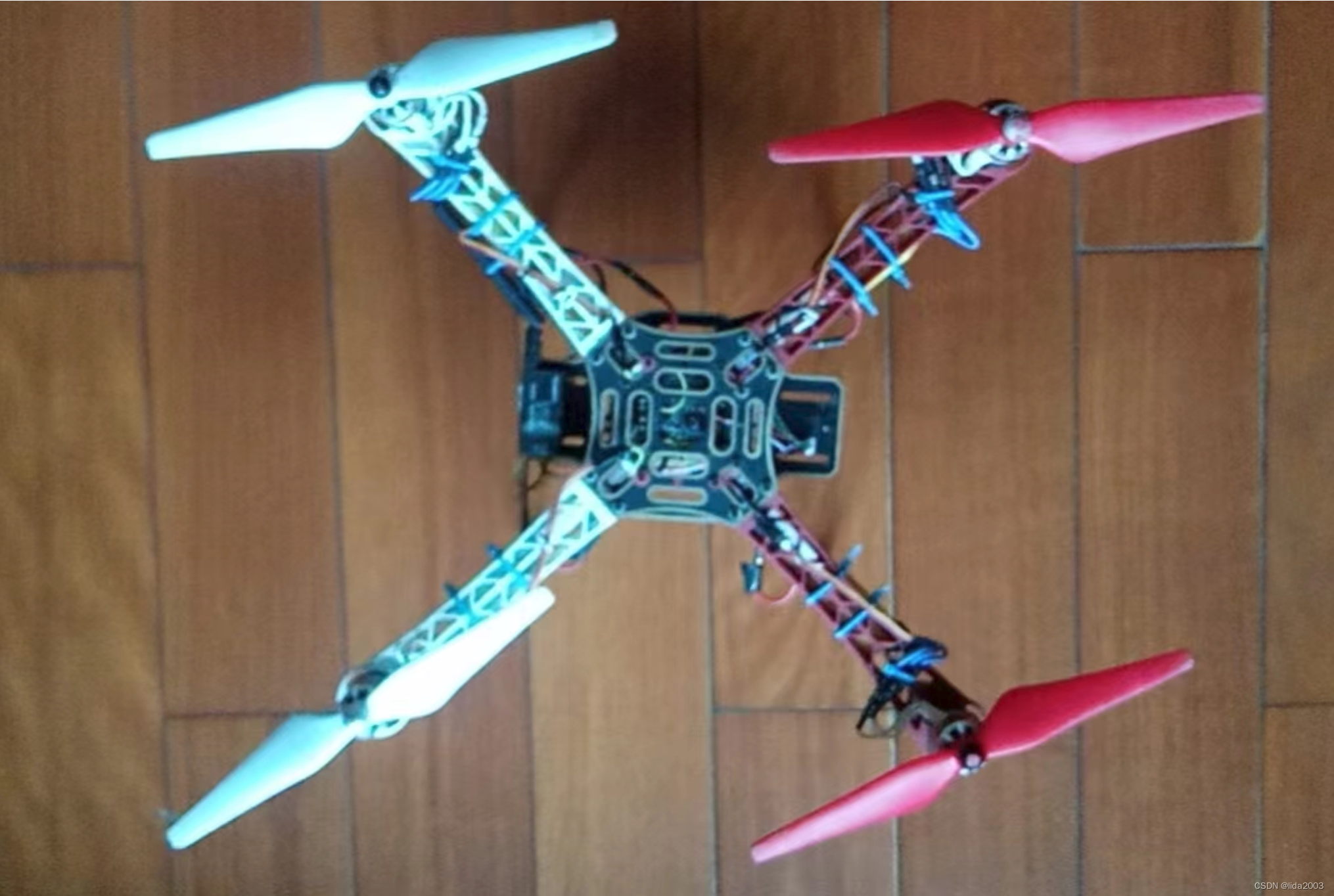
3. 实测效果
这个整体上比Betaflight的自稳模式下容易控制,飞行的更加平稳。貌似后续GPS按上以后巡航可能会更好一点。
ArduPilot-DIYF450-KakuteF7-AIO-stabilize手动控制测试
4. 参考资料
【1】Holybro Kakute F7 and KAKUTE F7 AIO
【2】Connect ESCs and Motors
【3】ArduPilot飞控之DIY-F450计划
【4】Betaflight BN880 GPS 简单测试
【5】四轴飞控DIY Mark4 - 减震
【6】BetaFlight模块设计之二十三:CRSF V3串口速率协商任务分析
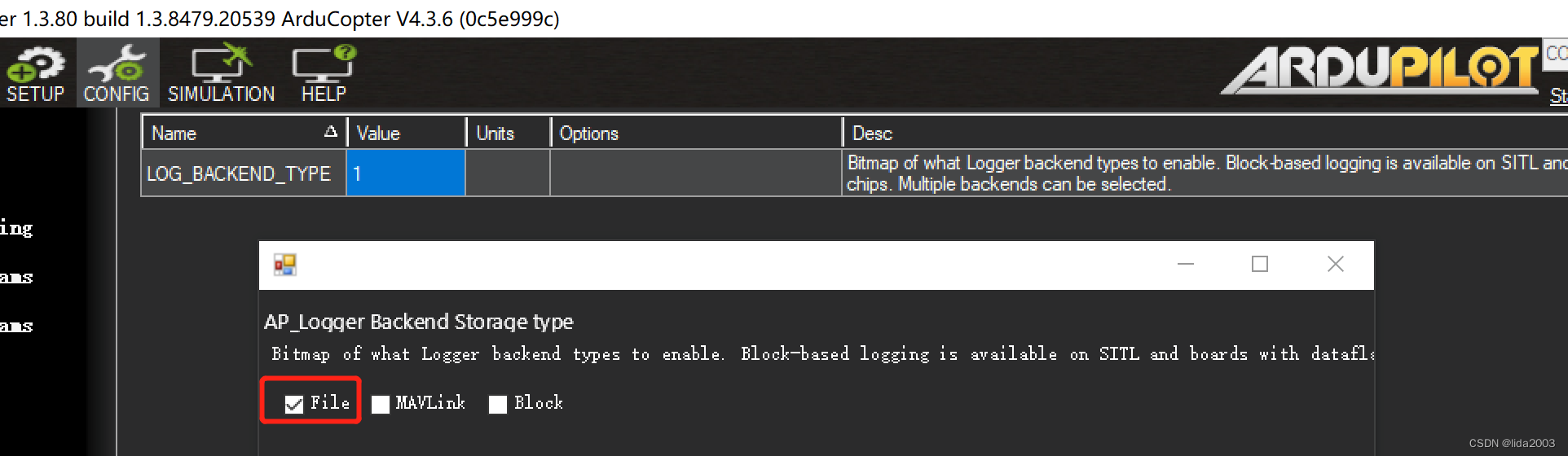
5. 附录-tf卡日志记录配置
检查LOG_BACKEND_TYPE,Kakute F7 AIO使用tf卡记录日志,因此选用1(FILE)。
注:有些劣质tf卡会没有办法记录,有一张8GB的扩容卡,坑了长长的一天时间。建议通过更换确认OK的tf卡测试。实在没有办法,可以设置为0,不做日志记录。
6. 附录-电流电压计配置
确保以下参数使用Mission Planner配置一遍,确保电流电压计输出值正确。
- BATT_MONITOR 4
- BATT_VOLT_PIN 13
- BATT_CURR_PIN 12
- BATT_VOLT_MULT 10.1
- BATT_AMP_PERVLT 17.0
如果配置不正确,会导致Battery pre-check始终过不了。主要是检测pin脚和参数不对的原因。ArduPilot的配置相对来说并不是那么人性化,当然买比较新的,官网维护的硬件会比较容易。DIY还是需要动手和逻辑分析的能力,否则这个坑是很难越过去的。
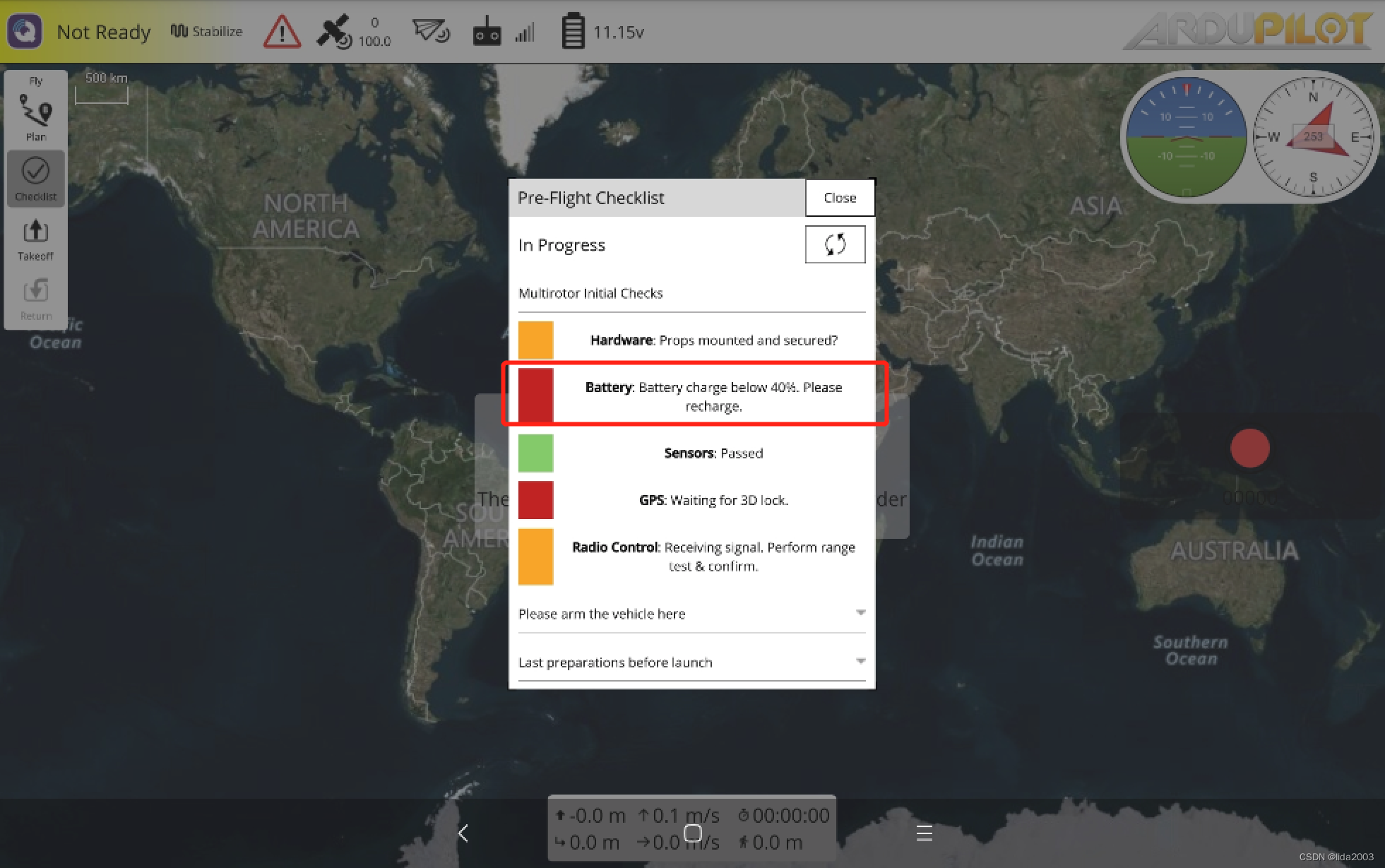
注:BATT_VOLT_MULT 可能需要调整,笔者实验发现调整到10.9 电压显示比较正确。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)