关于FPV图传系统时延讨论
- 1. 源由
- 2. 时延测试方法
- 3. 时延测试资料
- 4. 关于模拟图传
- 5. 关于FPV时延感受
-
- 6. 参考资料
- 7. 附录
- 7.1 When is 120fps NOT 120fps? //DJI O3 Air Unit 4k120 latency and refresh rate test
- 7.2 DJI O3 vs Avatar V2 vs Caddx Vista Range and Penetration Testing
1. 源由
视频图传系统最重要的几个技术指标:
- 分辨率
- 视角
- 帧率
- 时延
- 传输距离
目前高清图传主要规则:分辨率720P;视角摄像头光学系统决定;帧率60~120FPS;传输距离取决于射频发射功率、接受灵敏度以及传输环境;
因此,之前在对开源wfb_ng做了简单的验证过程重点测试的是720P下的时延情况。
【1】模拟FPV-肥鲨HDO2+无牙仔2+熊猫VT5804ML1+Foxeer野火 时延测试
【2】FPV Camera(RPI3+V2.1) | wfb_ng Release 23.01 | ubuntu20.04 gnome软解测试
【3】FPV Camera(RPI3+V2.1) | wfb_ng Release 23.01 | Ubuntu 20.04 xfce软解测试
【4】FPV Camera(RPI 3B+/Zero W+V2.1) | wfb_ng Release 23.01 | H264硬解测试
鉴于手中被测设备和测试工具的限制,不能做的非常详尽,但是还是期望能够了解当前技术瓶颈,以及现行产品的极限性能。
2. 时延测试方法
- 秒表测试法 //不准确,感性认识
- 高速相机拍照 //准确,精准量化
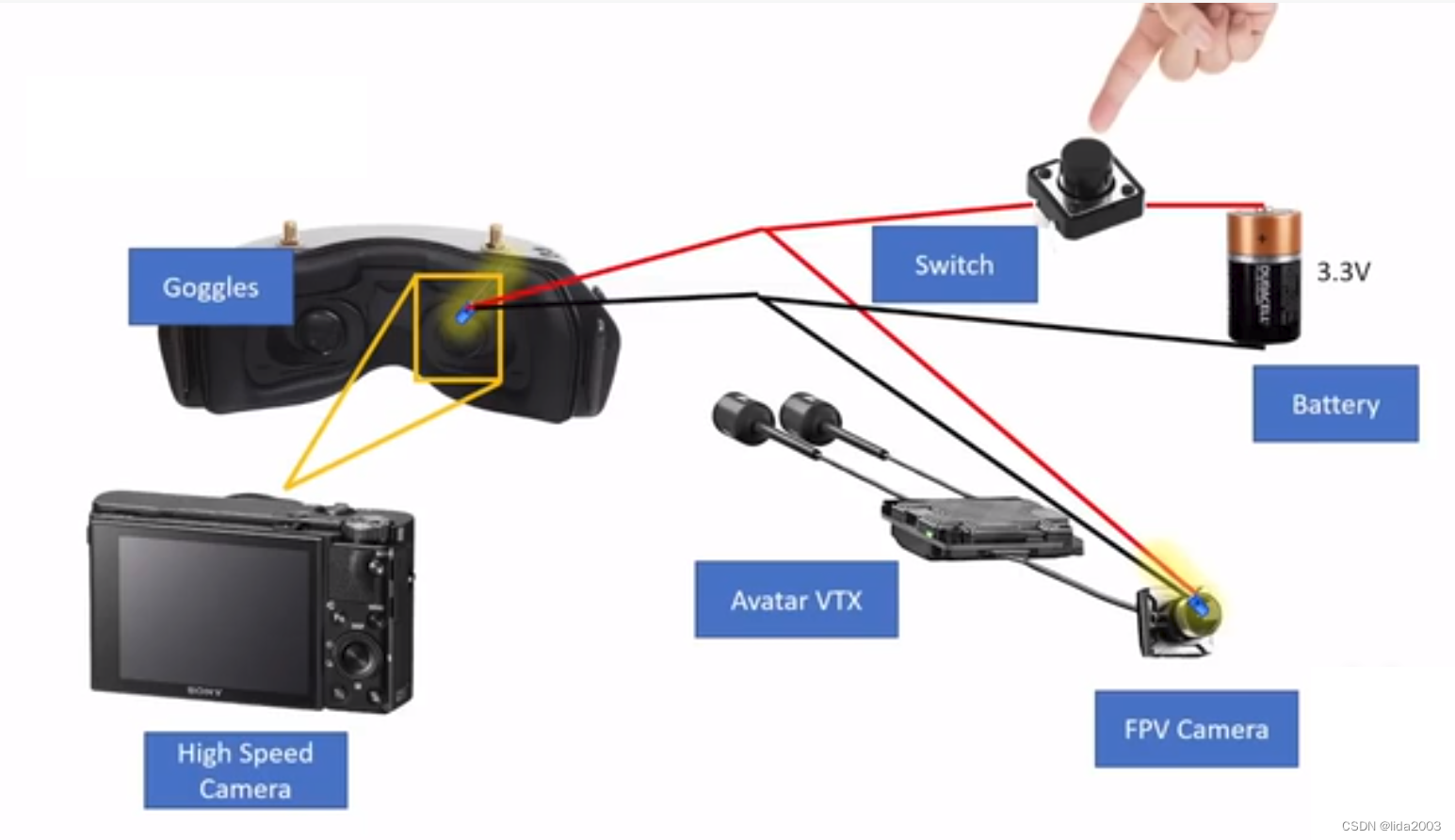
关于秒表测试方法就不做介绍了,高速相机拍照采用点亮LED(ns级同步速度),相对于ms级时延系统来说,可以忽略LED点亮的同步时间误差。
整个逻辑步骤:
- 当按下按钮,“光速”触发LED点亮
- 高速相机记录到相机前的LED灯点亮(此时,图传系统摄像头前端的LED也被点亮)
- 摄像头CCD光电效应检测到图像,通过图传压缩传输
- 眼镜接收到RF图传信号,解压压缩图像,刷新到显示缓存
- 显示缓存刷新到LCD/OLED屏幕
- 高速相机记录LCD/OLED屏幕信息(看到LED被点亮)
3. 时延测试资料
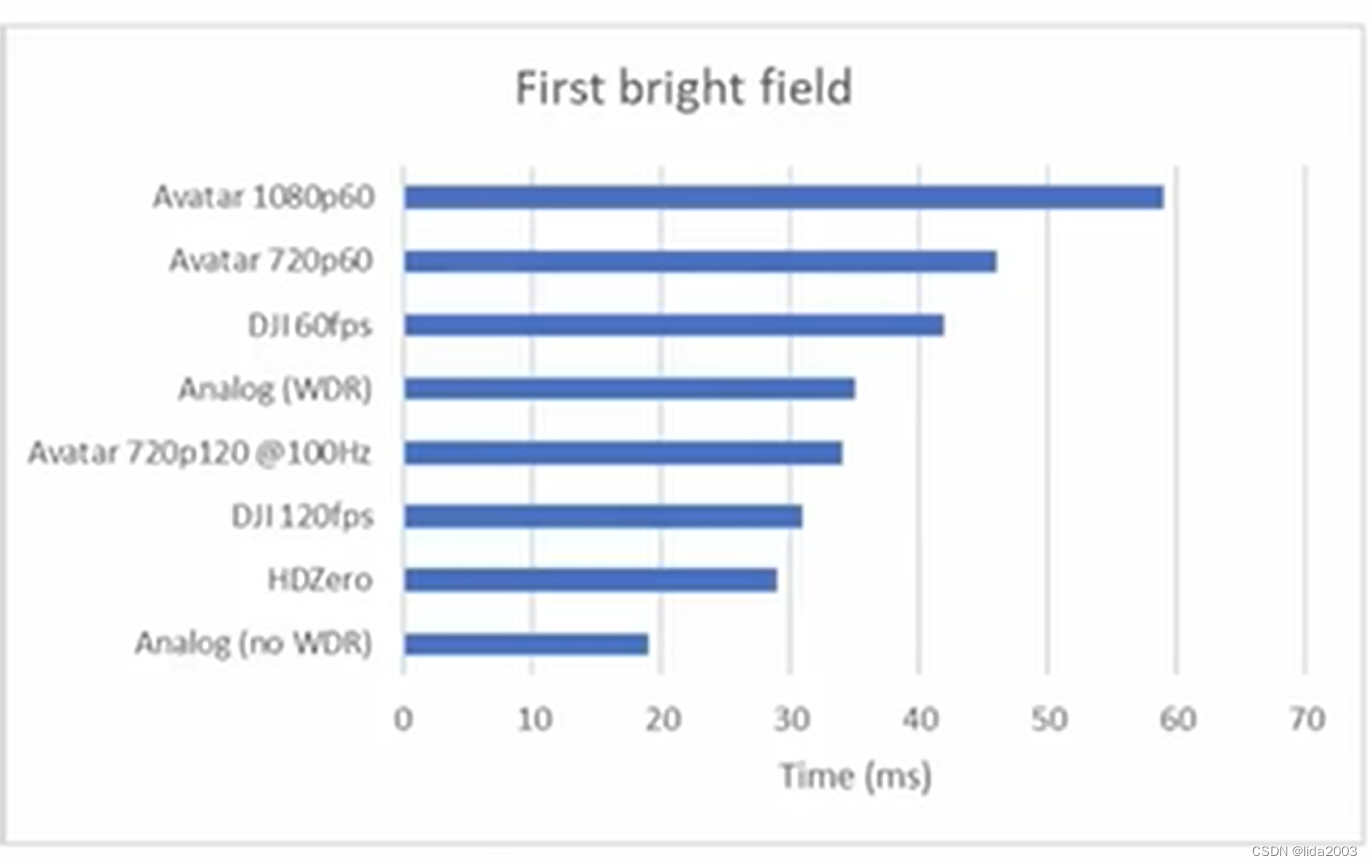
这里整理了一下网络资料,通过高速相机拍摄的测试结果如下:
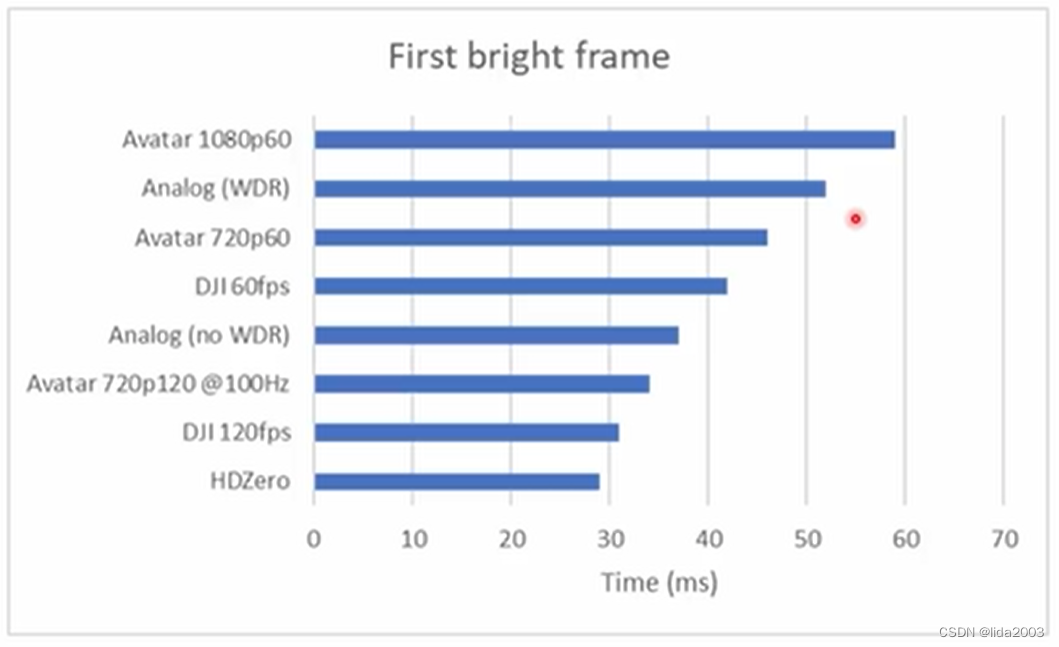
从测试数据看,HDZero和DJI 120 fps(DJI Google V2 + O3) 是比较好的高清图传,性能在30ms左右。
Walksnail Avatar Latency Testing vs DJI, HDZero and Analog!
4. 关于模拟图传
当然这也不是说模拟图传已经被淘汰。
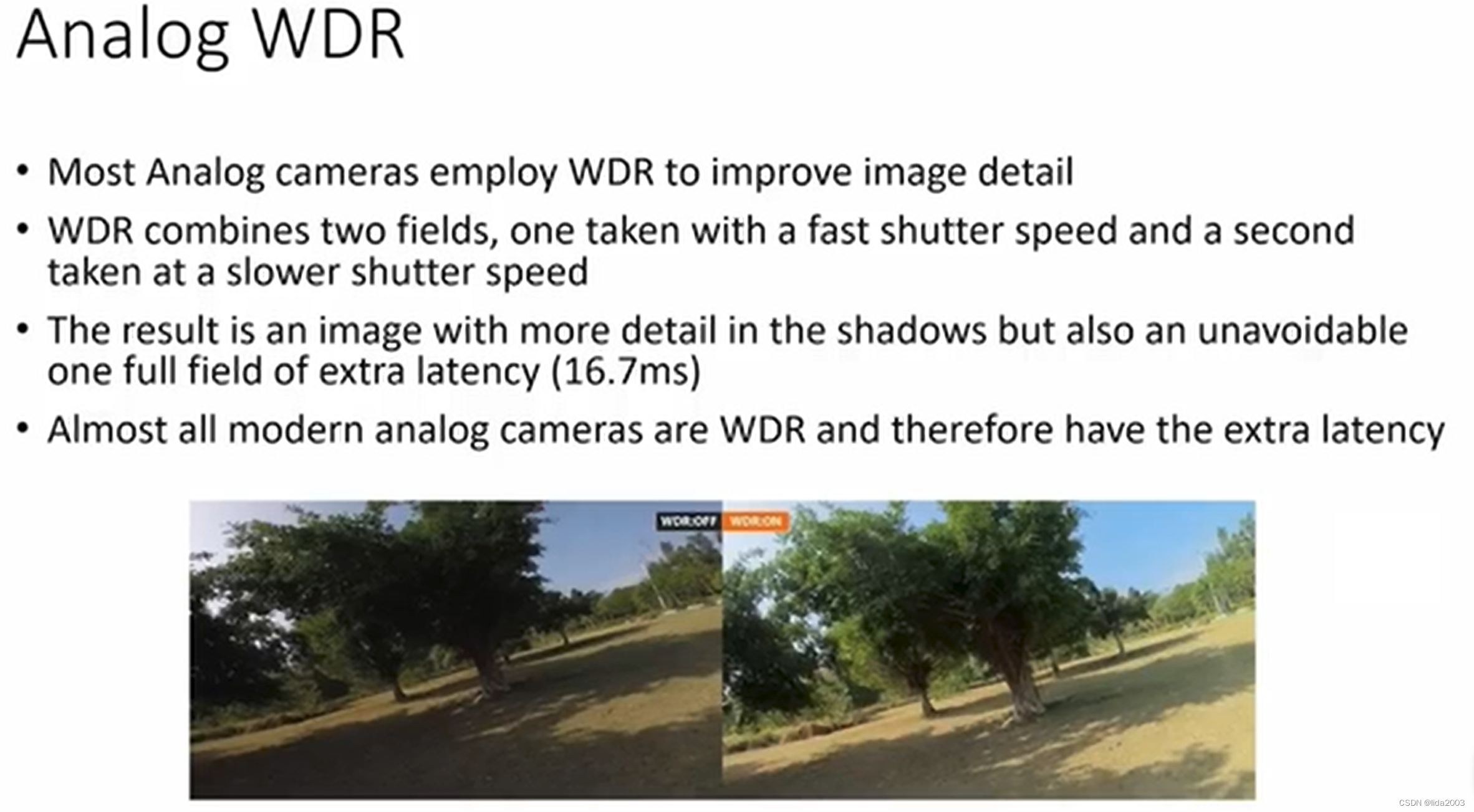
- 当关闭模拟摄像头WDR功能,模拟演示在20ms以下
- 很多场景并非一定需要高清,比如:远航功能测试等
- 毕竟性价比在那里
下面就是模拟摄像头WDR引入的16.7ms的额外时延,去掉后35ms - 16.7ms 大约 19 ms左右,这里显然就会比高清数字图传时延更优了。
5. 关于FPV时延感受
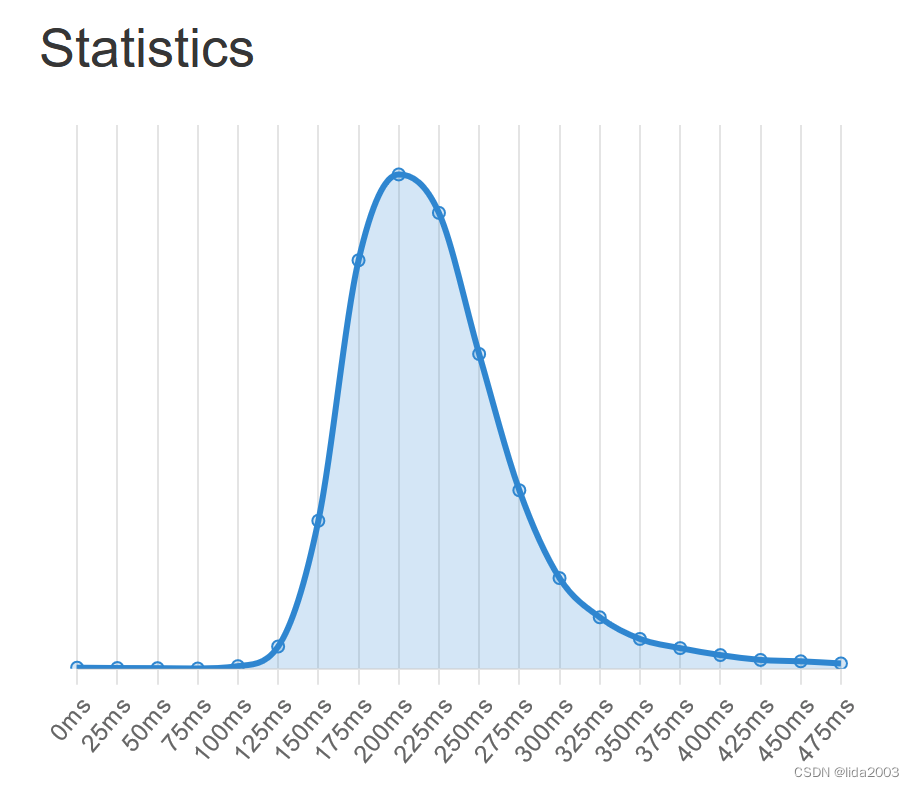
5.1 静态时延
人对于外界相应的时延大约在200ms左右,相较于整个控制系统回路来说,30ms左右的视频时延差距并不是主要的耗时。
当然从数据的角度来说,系统时延越小当然越实时。
5.2 动态时延
从动态的角度来说,个人认为存在两种场景:
- FPV动态飞行过程,突然出现一个障碍物。个人认为,对于“鬼探头”,这种额外的30ms时延很难解决问题。只能类似考虑“主动防御性”飞行来规避。
- FPV在复杂障碍物中穿越飞行,这个额外延时一定会对操控人员造成实时性的影响(尤其是非熟悉的环境)。
针对第二点,想表明的一个立场是,如果是一个熟悉的赛道,经过训练,反复试飞,即使30ms的延时,人可以通过学习做出预判。但是非熟悉环境,这种预判的准确性就会降低,局限了预判提前时间。因此,实时性就非常重要。
注:大家可以体会下下面视频给出的一些感受。
You should care about FPV latency. Here's why
6. 参考资料
【1】An Average Human Reaction Time
【2】How Fast is Real-Time? Human Perception and Technology
7. 附录
7.1 When is 120fps NOT 120fps? //DJI O3 Air Unit 4k120 latency and refresh rate test
DJI Google V2 + O3 120FPS能达到一个比较优秀的时延。
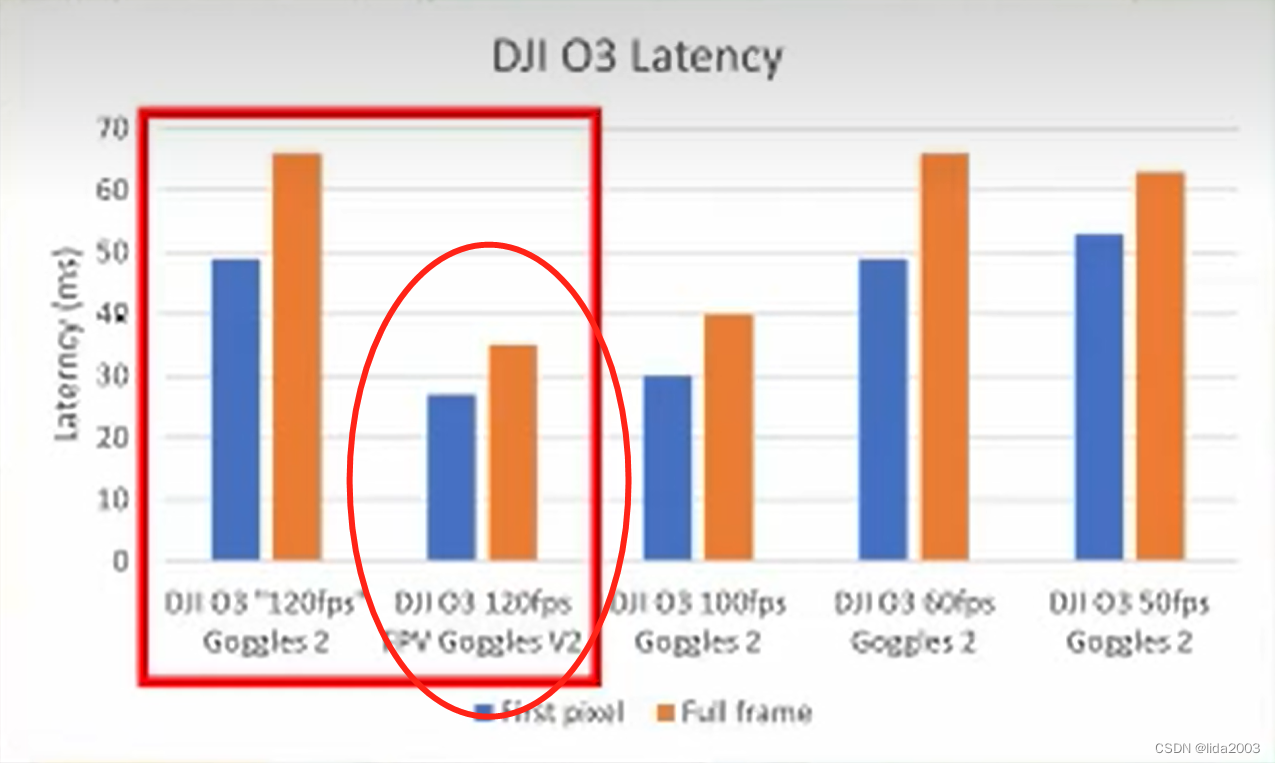
When is 120fps NOT 120fps? //DJI O3 Air Unit 4k120 latency and refresh rate test
7.2 DJI O3 vs Avatar V2 vs Caddx Vista Range and Penetration Testing
DJI O3 vs Avatar V2 vs Caddx Vista Range and Penetration Testing
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)