ESP32-FPV-Camera介绍和使用
- 1. 编译目标
- 2. 编译步骤
- Step 1 软件配置环境准备
- Step 2 获取开源代码
- Step 3 2.4G WiFi频段选择
- Step 4 要确保2.4G WiFi网卡处于Monitor状态
- Step 5 修改频点相关代码
- Step 6 修改WiFi网卡相关代码
- Step 7 OpenGL 版本问题
- Step 8 构建天空端
- Step 9 构建地面端
- 3. OV5640/OV2640规格及实测
- 4. OV2640与模拟FPV摄像头对比
- 5. 参考资料
ESP32是一款高性价比的嵌入式芯片,且其ESP-IDF工具采用了CMake的Unix Style开发方式,也是笔者比较喜欢的一种工程组织方式。IDE工具对于应用开发带来了便捷性,屏蔽了很多系统,模块,组件,开源(非开源)的底层细节。尤其是IDE工具经常升级,导致很多由于工具升级带来的各种问题(有的时候感觉莫名其妙),但是Makefile/CMake等成熟的嵌入工程组织方式更加稳定、可靠。
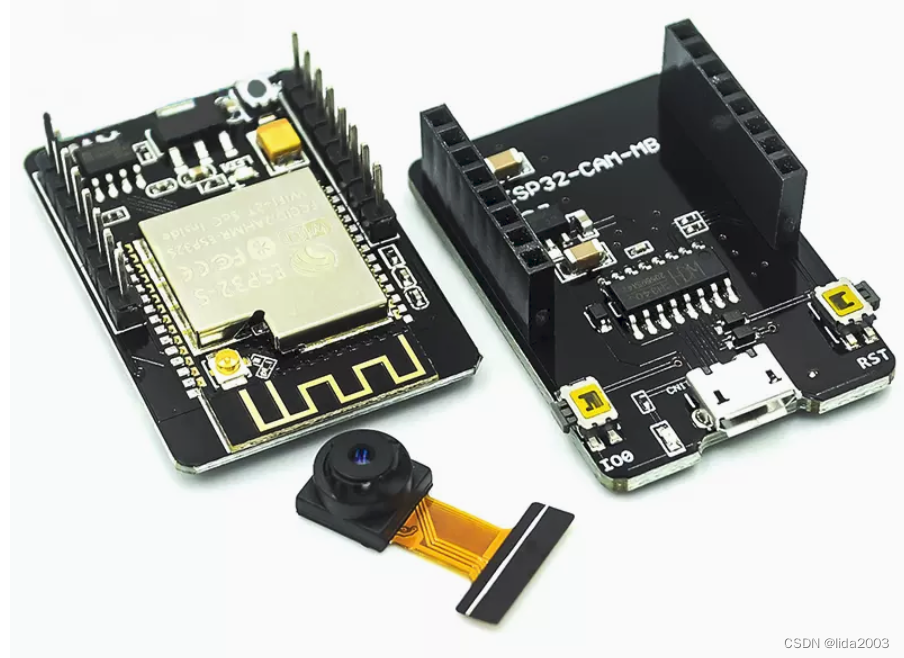
1. 编译目标
规格如下:
- ESP-32S模组
- 2MB 外部PSRAM
- 4MB SPI Flash
- SD Card
- 摄像头:OV2640
- 配套底板(支持自动烧录,否则需要跳线支持)
2. 编译步骤
Step 1 软件配置环境准备
这里基于Ubuntu准备相关的软件配置环境。
$ sudo apt-get update
$ sudo apt-get install git
$ sudo apt-get install gitk git-gui
$ uname -a
Linux daniel-ThinkPad-SL410 5.15.0-58-generic
$ lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 20.04.5 LTS
Release: 20.04
Codename: focal
Step 2 获取开源代码
$ git clone git@github.com:jeanlemotan/esp32-cam-fpv.git
Cloning into 'esp32-cam-fpv'...
remote: Enumerating objects: 324, done.
remote: Counting objects: 100% (81/81), done.
remote: Compressing objects: 100% (46/46), done.
remote: Total 324 (delta 48), reused 49 (delta 32), pack-reused 243
Receiving objects: 100% (324/324), 927.22 KiB | 856.00 KiB/s, done.
Resolving deltas: 100% (126/126), done.
$ cd esp32-cam-fpv/
$ git log -n 1
commit adc1e5c040bada4780de0db60716af411d326435 (HEAD -> main, origin/main, origin/HEAD)
Merge: 66ae72a c97be43
Author: jeanlemotan <10252034+jeanlemotan@users.noreply.github.com>
Date: Mon Feb 20 21:49:40 2023 +0100
Merge pull request
Fix typo in gs Makefile for Raspberry Pi check
$ git branch -a
* main
remotes/origin/HEAD -> origin/main
remotes/origin/main
Step 3 2.4G WiFi频段选择
- 实际环境,尤其是2.4G频段有大量的WiFi路由器信号;
- ESP32-FPV-Camera代码目前是写死的;
- 寻找一个相对没有被占用的频段,将大大降低干扰,从而减少丢包;
注:这里建议大家可以选择下载CELLULAR-Z软件,对WiFi信号进行扫描。
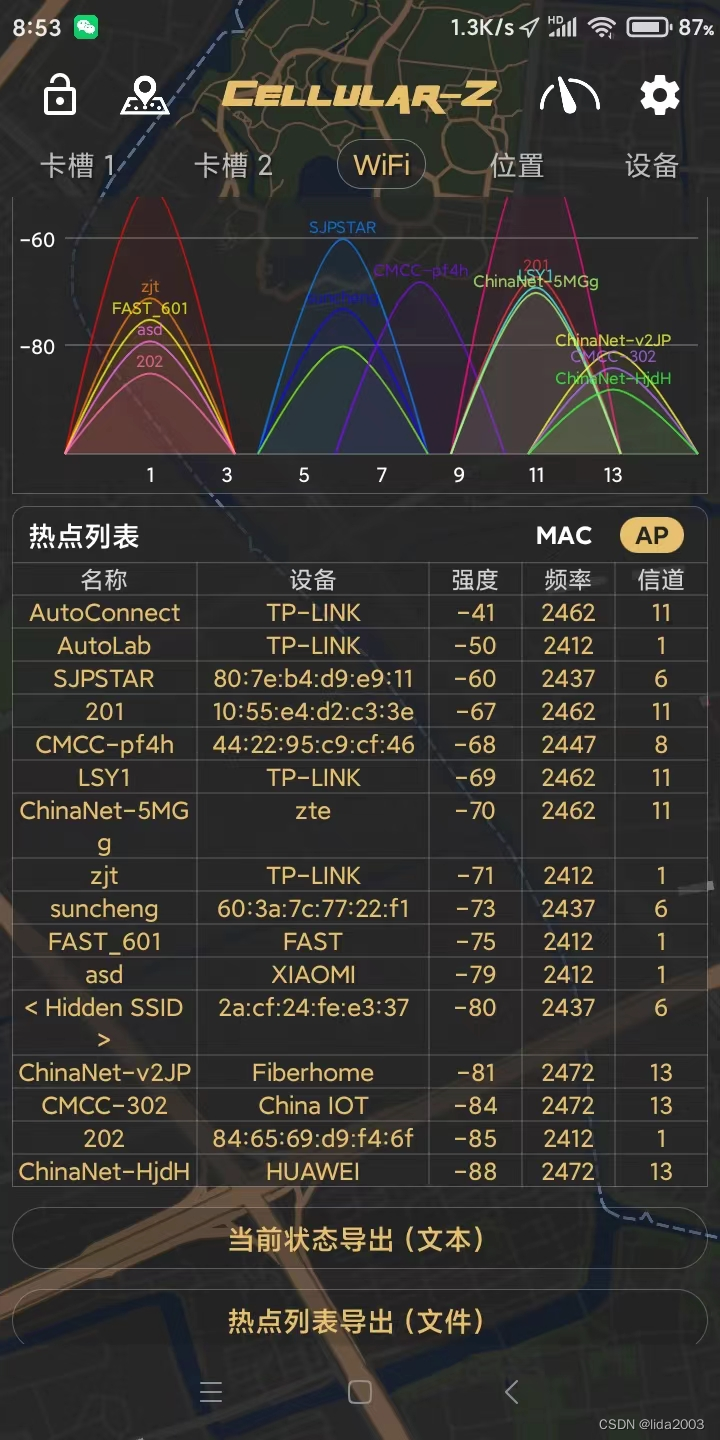 从以上扫描ssid热点信号看,4频段相对来说会受到较少干扰。
从以上扫描ssid热点信号看,4频段相对来说会受到较少干扰。
注:这里扫描到的是标准的WiFi热点信号,其他非标准干扰信号是无法扫描到的。因此如果仍然存在干扰问题,建议去暗室或更换测试时间或更换测试地点。
Step 4 要确保2.4G WiFi网卡处于Monitor状态
详见:WiFi monitor模式的配置和运行检查(Ubuntu系统)
建议:购买8812AU芯片网卡,并安装对应的kms驱动。
Step 5 修改频点相关代码
天空端:esp32-cam-fpv\air_firmware\main\main.cpp
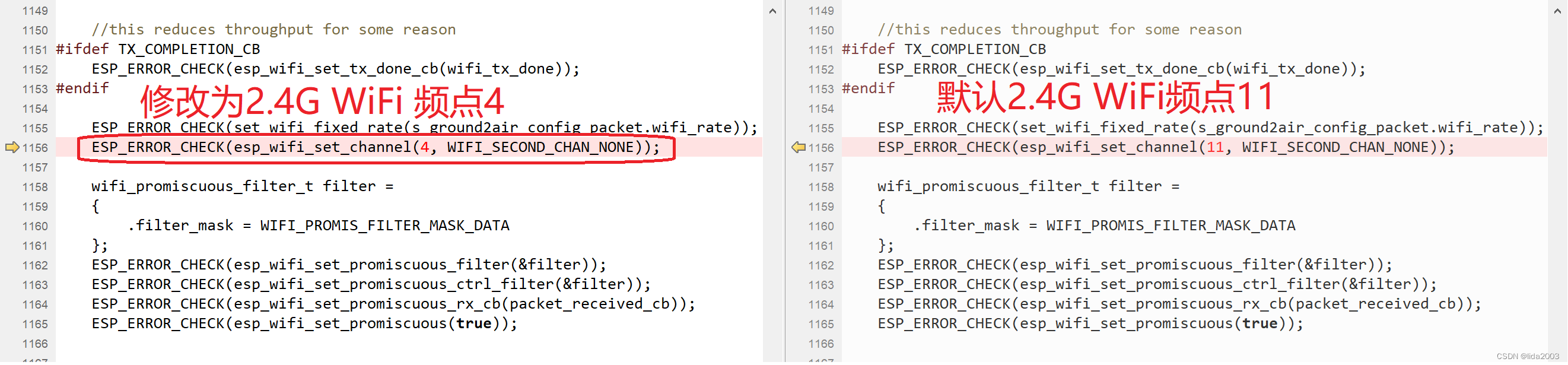
地面端:esp32-cam-fpv\gs\src\main.cpp

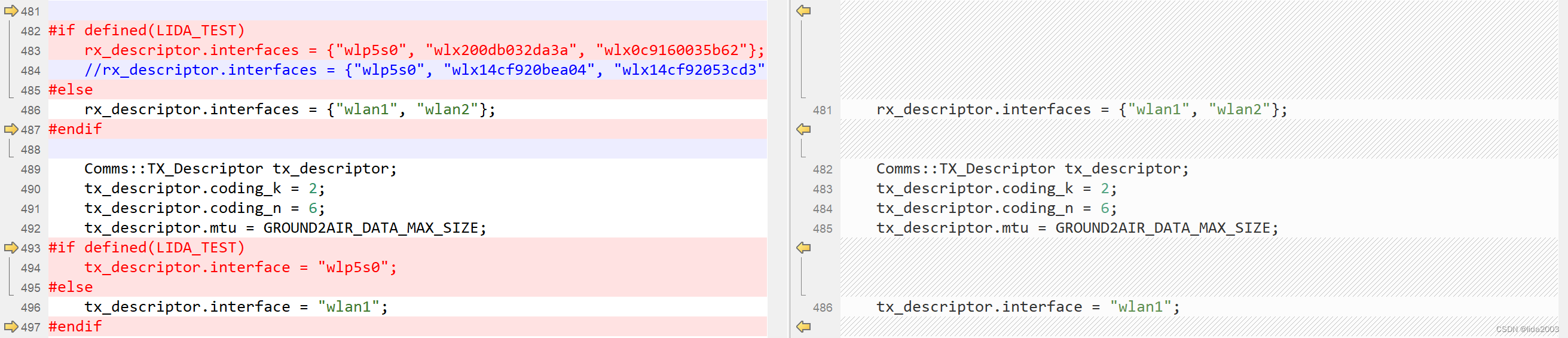
Step 6 修改WiFi网卡相关代码
笔记本自带一张网卡,笔者又自行购买了两块8812AU网卡(因为Monitor模式下带宽通常不高,多块网卡,分开方式可以减少丢包概率)
- wlp5s0:笔记本无线网卡
- wlx200db032da3a:8812AU网卡1
- wlx0c9160035b62:8812AU网卡2
地面端:esp32-cam-fpv\gs\src\main.cpp
Step 7 OpenGL 版本问题
ESP32-FPV-Camera作者jeanlemotan是在Pi 4上做的地面端。不过经过大家的努力,目前已经可以在笔记本电脑上进行地面端程序的运行。
注:这里有一些细节需要关注的就是OpenGL的版本问题。
$ glxinfo|grep version
server glx version string: 1.4
client glx version string: 1.4
GLX version: 1.4
Max core profile version: 3.3
Max compat profile version: 3.0
Max GLES1 profile version: 1.1
Max GLES[23] profile version: 3.0
OpenGL core profile version string: 3.3 (Core Profile) Mesa 21.2.6
OpenGL core profile shading language version string: 3.30
OpenGL version string: 3.0 Mesa 21.2.6
OpenGL shading language version string: 1.30
OpenGL ES profile version string: OpenGL ES 3.0 Mesa 21.2.6
OpenGL ES profile shading language version string: OpenGL ES GLSL ES 3.00
地面端:esp32-cam-fpv\gs\src\imgui_impl_opengl3.cpp

Step 8 构建天空端
当前天空端采用ESP-IDF v4.4.4,IDF安装,详见ESP32开发指南。
ESP32 SDK环境设置:
$ cd esp-sdk/esp-idf-v4.4.4/
$ . ./export.sh
Setting IDF_PATH to '/home/daniel/Work/esp-sdk/esp-idf-v4.4.4'
Detecting the Python interpreter
Checking "python" ...
Python 3.8.10
"python" has been detected
Adding ESP-IDF tools to PATH...
Not using an unsupported version of tool openocd-esp32 found in PATH: 0.10.0.
Using Python interpreter in /home/daniel/.espressif/python_env/idf4.4_py3.8_env/bin/python
Checking if Python packages are up to date...
Python requirements from /home/daniel/Work/esp-sdk/esp-idf-v4.4.4/requirements.txt are satisfied.
Added the following directories to PATH:
/home/daniel/Work/esp-sdk/esp-idf-v4.4.4/components/esptool_py/esptool
/home/daniel/Work/esp-sdk/esp-idf-v4.4.4/components/espcoredump
/home/daniel/Work/esp-sdk/esp-idf-v4.4.4/components/partition_table
/home/daniel/Work/esp-sdk/esp-idf-v4.4.4/components/app_update
/home/daniel/.espressif/tools/xtensa-esp-elf-gdb/11.2_20220823/xtensa-esp-elf-gdb/bin
/home/daniel/.espressif/tools/riscv32-esp-elf-gdb/11.2_20220823/riscv32-esp-elf-gdb/bin
/home/daniel/.espressif/tools/xtensa-esp32-elf/esp-2021r2-patch5-8.4.0/xtensa-esp32-elf/bin
/home/daniel/.espressif/tools/xtensa-esp32s2-elf/esp-2021r2-patch5-8.4.0/xtensa-esp32s2-elf/bin
/home/daniel/.espressif/tools/xtensa-esp32s3-elf/esp-2021r2-patch5-8.4.0/xtensa-esp32s3-elf/bin
/home/daniel/.espressif/tools/riscv32-esp-elf/esp-2021r2-patch5-8.4.0/riscv32-esp-elf/bin
/home/daniel/.espressif/tools/esp32ulp-elf/2.35_20220830/esp32ulp-elf/bin
/home/daniel/.espressif/tools/openocd-esp32/v0.11.0-esp32-20221026/openocd-esp32/bin
/home/daniel/.espressif/python_env/idf4.4_py3.8_env/bin
/home/daniel/Work/esp-sdk/esp-idf-v4.4.4/tools
Done! You can now compile ESP-IDF projects.
Go to the project directory and run:
idf.py build
编译天空端固件:
$ cd esp32-cam-fpv/air_firmware/
$ idf.py build
$ idf.py -p /dev/ttyUSB0 flash
$ idf.py -p /dev/ttyUSB0 monitor
Step 9 构建地面端
$ cd esp32-cam-fpv/gs/
$ make
3. OV5640/OV2640规格及实测
| 参数 | OV5640 | OV2640 |
|---|
| array size | 2592 x 1944 | 1600 x 1200 (UXGA) |
| power supply | 1.8 V / 2.8 V | 1.7V to 3.3V |
| power consumption | active: 140 mA | 140 mW (for 15 fps, compressed mode) |
| lens size | 1/4" | 1/4" |
| maximum image transfer rate | QSXGA (2592x1944): 15 fps;1080p: 30 fps;1280 x 960: 45 fps;720p: 60 fps;VGA (640x480): 90 fps;QVGA (320x240): 120 fps | UXGA/SXGA: 15 fps;SVGA: 30 fps;CIF: 60 fps |
从规格的角度看OV5640胜出,但是实测情况貌似OV5640并不理想。
ESP32-FPV-Camera FPS Test
4. OV2640与模拟FPV摄像头对比
这里采用对比近距离测试:
- 无牙仔2模拟摄像头 + 熊猫图传 + 肥鲨眼镜
- ESP32-FPV-Camera(OV2640 + 外置ipx 3dbi猪尾巴天线) + 笔记本电脑(8812AU网卡 x 2 + 笔记本网卡)
存在以下几个问题:
- 无牙仔2是鱼眼镜头,整体视角宽(变形)
- 晃动时,因为视场范围小,因此整体看ESP32场景变化大
- FOXEER Micro无牙崽2 1200TVL m12 1.7镜头 整体规格高于ESP32-FPV-Camera(800 x 600)
- 外接ipx天线座电阻焊接处理存在问题(可能影响信号),且该模块没有RF信号放大
- 增加分辨率会导致jpeg传输数据量的增加,需要更高的带宽
- OV2640 SVGA(800 x 600)上限是 30 fps
ESP32-FPV-Camera与模拟摄像头简单对比
5. 参考资料
【1】WiFi monitor模式的配置和运行检查(Ubuntu系统)
【2】ESP32-Camera性能(简单)测试评估
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)