本文内容摘抄于:《计算机图形学的概念》
一、计算机图形学的范畴
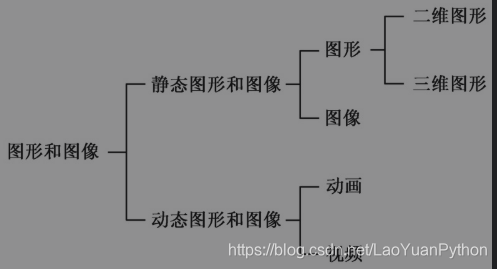
1、图形主要分为两类,一类是基于线条信息表示的,如工程图、等高线地形图、曲面的线框图等;另一类是明暗图,也就是通常所说的真实感图形;
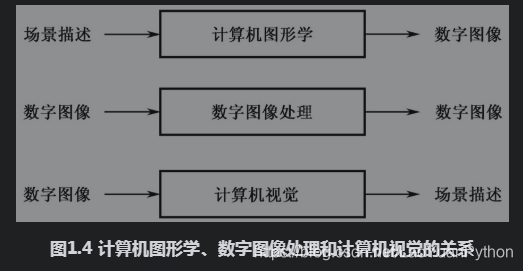
2、计算机图形学利用计算机建立图形所描述的场景和物体的几何表示,再用某种光照模型计算在假想的光源、纹理、材质属性下的光照明效果;
3、数字图像强调计算机内以位图(Bitmap)形式存储的灰度信息;而计算机图形则强调景物的几何属性,计算机生成的景物由几何模型(位图或向量方式)和物理属性信息共同描述;
4、三维多面体物体的图形称为几何形体(Shape)或景物,由二维图像运动产生的动态图像称为视频(Video, Movie),又将使某一图形随时间变化或运动得到的动态图形称为动画(Animation)。通常意义上的图像(Image)就是绘画、照片、影像等的总称。照片、影像等是从现实世界中直接采样获得的,但是在计算机中都被数字化了,因此称之为数字图像(Digital Image)
5、在计算机内以二维方式来定义和存储几何图形称为二维计算机图形学(2D CG),以三维方式来表示和存储几何形体(景物)称为三维计算机图形学(3D CG)。在计算机内定义或表示图形、物体以及场景称为图形生成或几何建模(Geometric Modeling),所定义的对象称为几何模型(GeometricModel)。图形及景物模型由点、线、面以及球、立方体、圆锥、多面体等基本数学形状描述,并在计算机内变成用它们的几何信息(坐标值)和相位信息(连接关系)表示和存储的数学模型。
6、给图形或景物模型着色,以真实感的效果表现它们的技术称为绘制(Rendering),也称渲染。特别地,称模拟光照产生阴影的技术为明暗处理(Shading)。在图形与景物的数学模型上应用绘制技术,就能将其变换成作为数字图像数据的显示模型(Display Model)。
7、计算机图形学的主要内容就是图形或景物模型的建模和绘制,并在此基础上增加了把三维图形或景物模型在二维平面上表示的投影变换、在计算机内使景物变形的几何变换和进一步使景物运动作为动态图像显示的动画等。
8、把现实世界中的景物用图像输入设备(如数码相机、扫描仪、手绘板等)作为像素的集合采集进来,并在计算机内进行适当处理,最后作为图像从图形输出设备输出。这种情况一般不属于计算机图形学的范畴,通常属于数字图像处理技术这一重要领域
二、计算机图形学的研究内容
三、常见的三维模型
1.线框模型(Wire-frame Model):这种模型以线条来表现三维形体的轮廓线,没有面,不能消隐、着色和绘制真实感图形
2.表面模型(Surface Model):表面模型在线框的基础上添加了表面,可以进行消隐、着色和绘制,从而得到具有真实感的视觉效果。包括:
3.实体模型(Solid Model):常见的有构造实体几何和体素两种
四、变换与投影
五、绘制与显示
六、图形流水线(Graphics Pipeline)
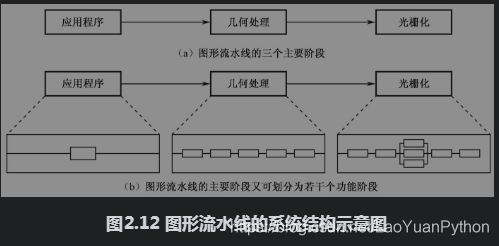
图形流水线的基本结构由三个主要阶段构成:应用程序、几何处理和光栅化,如图2.12(a)所示。而这三个主要阶段还可以进一步划分为若干个功能阶段,如图2.12(b)所示。换句话说,每一个阶段也可以是流水线结构。
-
应用程序阶段(Application Stage):这一阶段最重要的任务是建模,将需要绘制的几何体以及纹理数据输出到图形流水线的下一阶段。这些几何体都是绘制图元(如点、线、三角形、多边形、曲面片等)。同时,碰撞检测、纹理动画、几何变形、人机交互、键盘、鼠标、传感器等的输入检查都是这个阶段的任务。这个阶段的计算通常由CPU来执行。
-
几何处理阶段(Geometry Stage):这一阶段主要负责大部分多边形和顶点操作。可以将这个阶段(也是流水线)进一步划分为如图2.13所示的几个独立的功能阶段——模型与观察点变换、光照和着色、投影、裁剪、屏幕映射。很显然,几何处理阶段的计算量非常大。

-
光栅化阶段(Rasterizer Stage):在这一阶段,根据几何处理阶段处理后的顶点、颜色和纹理坐标,将二维屏幕空间的图形顶点扫描转化成像素,即负责显示屏上每个像素的填充、纹理映射及可见性计算等工作。
需要指出的是,就目前计算机图形学技术发展水平而言,图形流水线中的应用程序阶段的功能通常是用软件方式实现的,即图形硬件加速常常位于图形流水线的后期。而几何处理和光栅化过程几乎都用硬件来实现。总的来说,软件实现和硬件实现之间经常性地交替推进,而且存在着将软件算法硬件化的趋势。近年来,图形硬件,特别是GPU(GraphicsProcessing Unit)的不断升级换代有力地支持了图形流水线这一概念,甚至连比较高级的应用程序阶段的算法都尽可能地利用硬件来实现。
七、数字图像
数字图像显示器(如CRT、LCD等)屏幕的像素示意图。屏幕上的基本可显示单位为像素,即图像元素(Picture Element, Pixel)的简称。程序通常假设像素排列成矩形阵列,称为光栅(Raster)。从左至右水平排列的一行像素的集合称为扫描线(Scan-line)。把一屏称为一帧(Frame)。需要用实际的二维屏幕坐标来表示像素的位置。计算机图形处理硬件具有存储像素信息的帧缓存(Frame Buffer)。
计算机生成的图形是数字化的。它们多数情况下是通过光栅设备展现给用户的。计算一个景物(多边形)在屏幕上的投影位置就是确定它在屏幕上的显示区域中覆盖了哪些像素。这一过程称为光栅化(Rasterization)或扫描转换(Scan Conversion)。也可以这样来理解,光栅化是对屏幕上一片连续的显示区域进行离散化采样的过程。在光栅显示器的屏幕上生成一个对象,实际上是往帧缓存的相应存储单元中写入数据。图形的光栅化过程一般分为两个步骤:首先确定像素位置(坐标);再用图形的颜色或其他属性对像素进行某种写操作,即着色。因此,光栅化就是确定屏幕空间中最佳逼近于图形的像素集合。
如果给每个像素分配一位来存储,就只能够显示黑白或单色图像。如果对每个像素分配n位来存储,就能够显示2的n次方级的灰度(Gray Scale)图像。所谓灰度级,就是给每个像素的明暗分配的等级。把像素从最暗到最亮分成等级(依照惯例最暗表示为0,最亮表示为1),用相应的整数来表示各等级。如果在单色图像显示时,各个像素分配8位来存储,则最多可以显示2的8次方= 256级灰度的单色图像。
对于彩色图像的显示,通常用红(R)、绿(G)、蓝(B)三原色混合产生新颜色。这称为RGB颜色空间。注意,红、绿、蓝三原色是以叠加方式混合的。这种加性颜色混合与另一种常见的减性颜色混合不同,后者控制着画家使用颜料进行调色以及各种画笔软件。
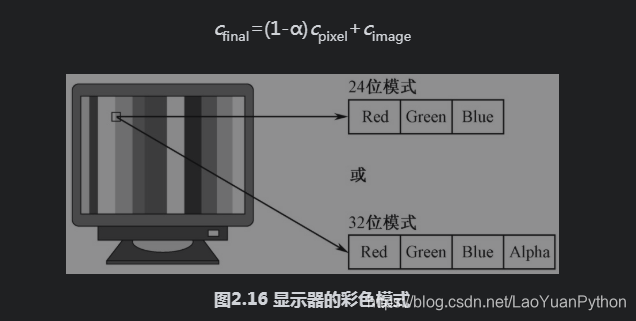
把整个图像用数字图像来表示或显示,实际上就是这样为每个像素分配位存储信息的。如果每一种颜色都用8位存储,256级灰度显示,各像素的颜色存储位数就是3×8=24位,能够表示2的24次方级即16兆种颜色的彩色图像。
在表示彩色数字图像时除了可以采用24位模式外,还可以采用32位模式,即附加一个8位的α(Alpha)通道,用来控制图像的透明性或者不透明性。图像可以用下面的公式来表示:c(x, y)=((r(x, y),g(x, y),b(x, y),α(x, y))
α = 1意味着像素是完全不透明的,即任何以前显示在像素上的背景颜色都被图像的颜色所重写。α = 0意味着像素是完全透明的,即任何以前显示在像素上的背景颜色将不受图像RGB颜色的影响。对于0<α<1,图像原有颜色cimage与像素当前颜色cpixel合成得到像素的最终颜色:


跟老猿学Python、学5G!