欢迎关注个人公众号:导航员学习札记
一、前言
最近研究不同FTP的基站数据,发现它们坐标系都不一致,因此研究了下GNSS定位结果的坐标系。参考了一些文献,自己进行了下总结,欢迎指正。
通常GNSS定位算法可以输出各种坐标系下的定位结果(大地坐标系LLA、当地坐标系NED、地球固定坐标系ECEF),但是算法内部通常采用ECEF坐标系进行计算。ECEF坐标系的种类有很多,通常大多数算法中默认为WGS84坐标系,而实际各种定位算法的定位结果究竟在哪种ECEF坐标系中呢?
二、单点定位
由计算公式可以看出,单点定位中定位结果的坐标系,取决于由星历计算出来的卫星ECEF位置的坐标系。通过看各个卫星系统ICD,或者搜索就可以知道GNSS参考系统:
- GPS星历所计算出来的卫星位置是WGS84坐标系;
- GLONASS星历计算出来的卫星位置是PZ-90坐标系;
- GALILEO星历计算出来的卫星位置是GTRE坐标系;
- BDS星历计算出来的卫星位置是BDCS坐标;
因此如果是用单系统进行计算,那么计算出来的位置就位于相应的GNSS参考系。比如只用GPS卫星进行计算,那么定位位置在WGS84坐标系中。不过由于本身广播星历所计算出来的卫星位置误差就有几米到几十米的误差[1,2],单点定位的精度本身也是米级,这个量级已经大于了坐标系之间的误差。所以多个系统一起进行单点定位,即使认为单点定位位置是在WGS84坐标系下,也是可以的,这一点在RTKlib的用户手册中也有提及(具体可参见其E.2 Coordiantes System)。
三、差分定位
从计算公式可知,无论是伪距差分,还是载波相位差分,实际上是在计算基线向量。在基站位置上,加上基线向量,从而得到用户位置。在差分定位中,差分定位位置的ECEF坐标系取决于基站的坐标系。
那卫星位置的坐标系没有影响吗?有影响,但是非常小。在差分定位中,我们会利用卫星位置来计算LOS(line of sight)。LOS的分母是用户位置到卫星位置之间的距离,分子是用户位置和卫星位置ECEF三个轴分量的差值。如果按卫星高度2万公里算(分母),坐标转换误差即使是10米,结果也是10E-7。即使再乘以基线,误差也最多是毫米级。
不同的Network或者不同CORS站,它们的基站位置通常在不同坐标系下。在进行差分定位时,由于我们需要达到厘米级的定位精度,因此我们需要注意基站的坐标系。
四、PPP
和单点定位相似,PPP的定位结果坐标系取决于精密星历中卫星位置的ECEF坐标系。
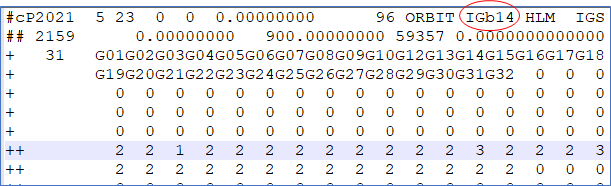
在精密星历文件的第一行会标注所采用的坐标系,以我在CDDIS上下载的igs21346.sp3文件为例,其采用的坐标系为IGb14坐标系。
IGb14和IGS14只有毫米级误差[4],IGS14坐标系和ITRF2014坐标系一致[5],而ITRF2014和WGS84只有几个厘米的误差,具体可参考该问题[6],通常认为不需要转换。因比,实际精密星历中的IGb14坐标系和WGS84坐标也是几个厘米的误差,相对于PPP的精度而言,也不需要转换,可以直接认为是WGS84坐标系下的结果。
参考资料
[1] RTKlib 用户手册E.2 Coordiantes System
[2] Jia, Rui Xi, et al. “Broadcast Ephemeris Accuracy Analysis for GPS Based on Precise Ephemeris.” Applied Mechanics and Materials. Vol. 602. Trans Tech Publications Ltd, 2014.
[3]https://geodesy.noaa.gov/web/science_edu/presentations_library/files/stressler_igs_poster_2018_final.pdf
[4]https://lists.igs.org/pipermail/igsmail/2020/007917.html
[5]http://acc.igs.org/igs-frames.html
[6]https://www.researchgate.net/post/Is_there_a_way_to_convert_the_ITRF2014_coordinate_to_WGS84_coordinate
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)