1、背景
launch 了一个建图程序,并打开了 rviz,rviz 中也 add 了 map,但是 rviz 中并未出现期望的2D地图,让人很是手足无措。
2、问题解决
百度了才发现自己使用的建图方式为gmapping,它是对著名的开源OpenSLAM包在ROS框架下的一个实现。这个包提供了对激光设备的SLAM支持,根据激光设备的输入和姿态数据建立一个基于网格的2D地图。它需要从ROS系统监听许多Topic,并输出一个Topic : /map ,(话题数据类型为nav_msgs/OccupancyGrid),这也是 rviz 的输入Topic。
- 启动RViz,点击 add 按钮(左下方) ,在弹出的列表中选择 map,点击OK,这时rviz中间的显示区域仍然是空的
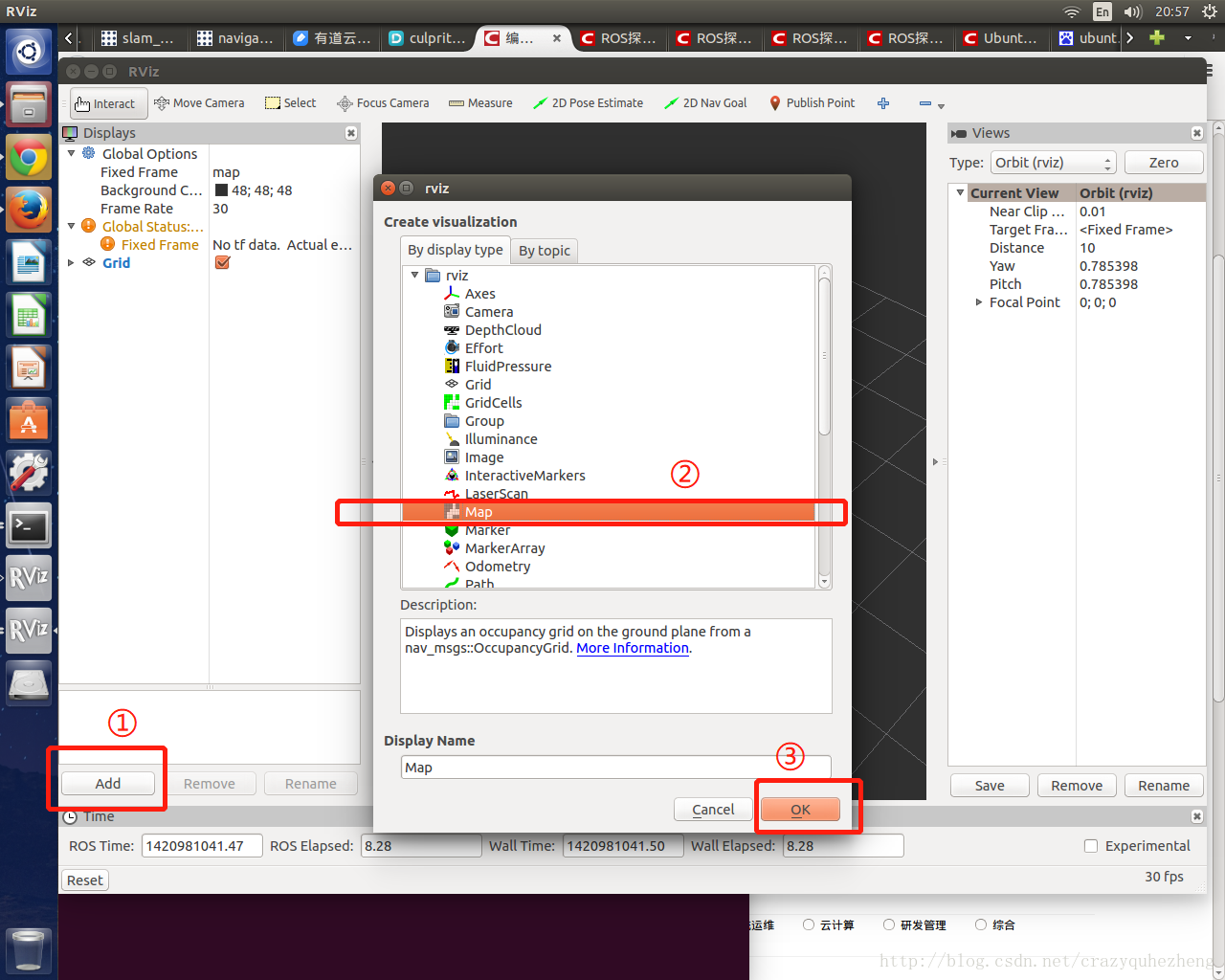
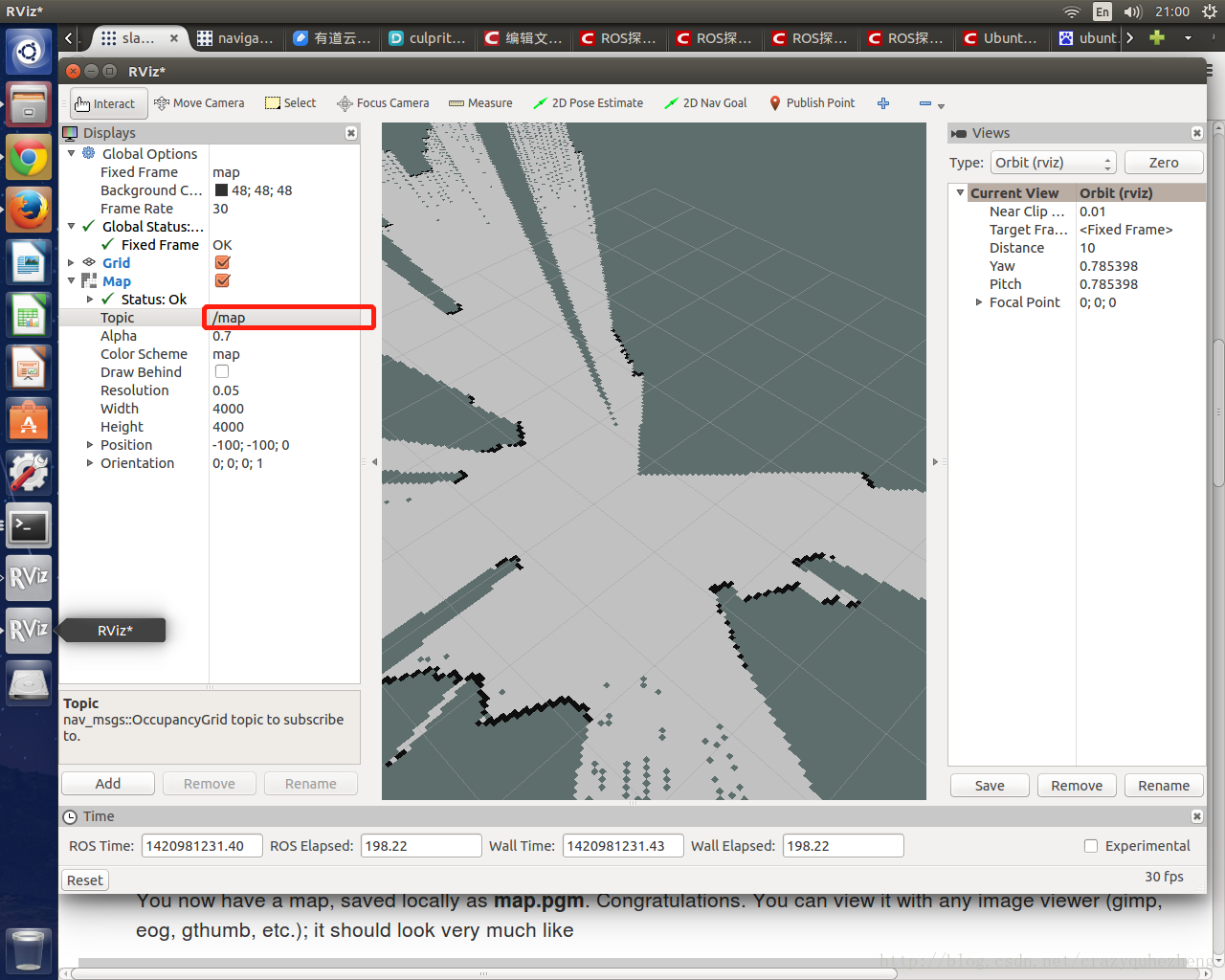
- 最关键的一步,要告诉 rviz 生成 map 信息的 topic 是什么。我们前面讲到过,gmapping输出的topic是 /map。如下图配置,填充map的topic,立即就可以看到地图的动态建立了
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)