教程:使用树莓派连接Pixhawk飞控
树莓派可以与Pixhawk飞控相连,读取飞控中的状态信息,同时对飞控发送指令。树莓派作为一个更高性能的计算平台,可以运行图像识别、机器学习、实时路径规划等程序,为开源无人机带来了无限可能。
本文将介绍如何在树莓派上使用APSync。不需要了解Linux,即可将树莓派连接到Pixhawk飞控。
使用的器材为:
- Pixhawk飞控
- 树莓派3B(Raspberry Pi 3B)
- 运行Windows 10的PC
Pixhawk与树莓派接线
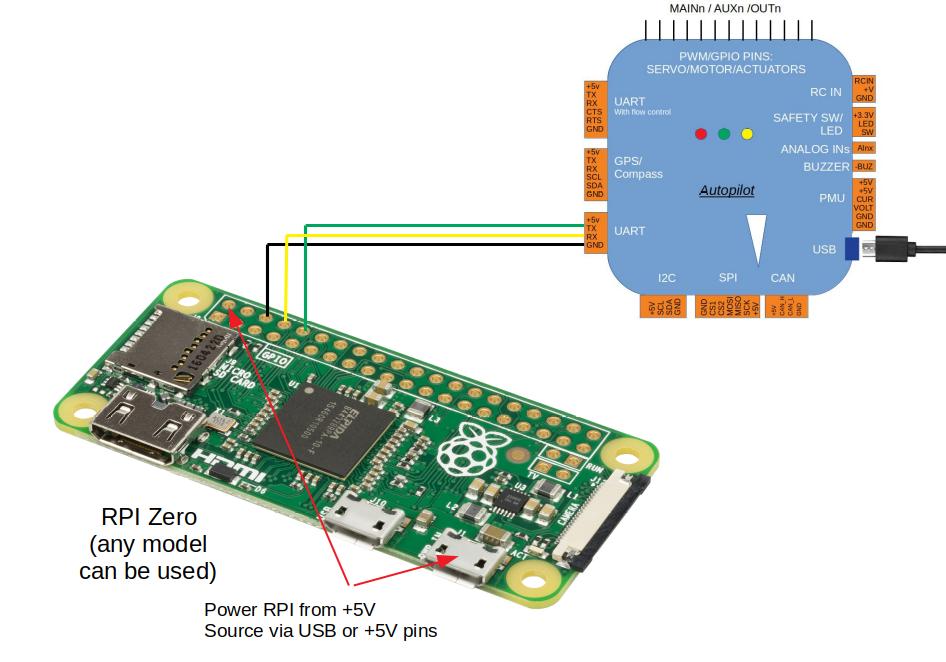
如图所示接线。将Pixhawk飞控上Telem2口的四根线引出:
- Telem2的5V连接树莓派的5V
- Telem2的TX连接树莓派的RX
- Telem2的RX连接树莓派的TX
- Telem2的GND连接树莓派的GND
可以将与飞控接口适配的端子线与杜邦线焊接,或直接在端子线另一端连接杜邦头。
提醒和建议:
- Pixhawk上,Telem2的5V接口支持大电流输出,可以给树莓派供电;如果担心稳定性问题,可以通过DC-DC降压模块从电池直接供电,或通过图中标注的Micro USB for power接口,使用USB供电。使用其他方式供电时,5V就可以不连接
- 电脑USB的输出功率不一定能供飞控、树莓派和其他外设正常工作,树莓派工作时请接电池
- 建议在树莓派的5V接线上加装开关,避免频繁插拔接头(杜邦接头会松)
- 树莓派的I/O口是3.3V电平,且没有5V tolerant,切忌将5V电平直接接入树莓派的I/O口!
刷写APSync
APSync对Pixhawk飞控进行了适配和优化,是专用于无人机机载电脑的Linux发行版本。APSync内置了许多实用功能,不必再对树莓派进行繁琐的配置,同时也不必再另购鼠标、键盘和显示器。
步骤如下:
购买一张8G以上容量的SD卡(如果之后的数据很多,8G可能会不够用,16G为佳)
将SD卡通过适配器,插入PC的卡槽或USB接口
下载最新版本的APSync,找到其中以”apsync-rpi”开头的文件并下载
在Windows平台上,下载Win32DiskImager。Linux和Mac请参见树莓派的官方指南(英文)。
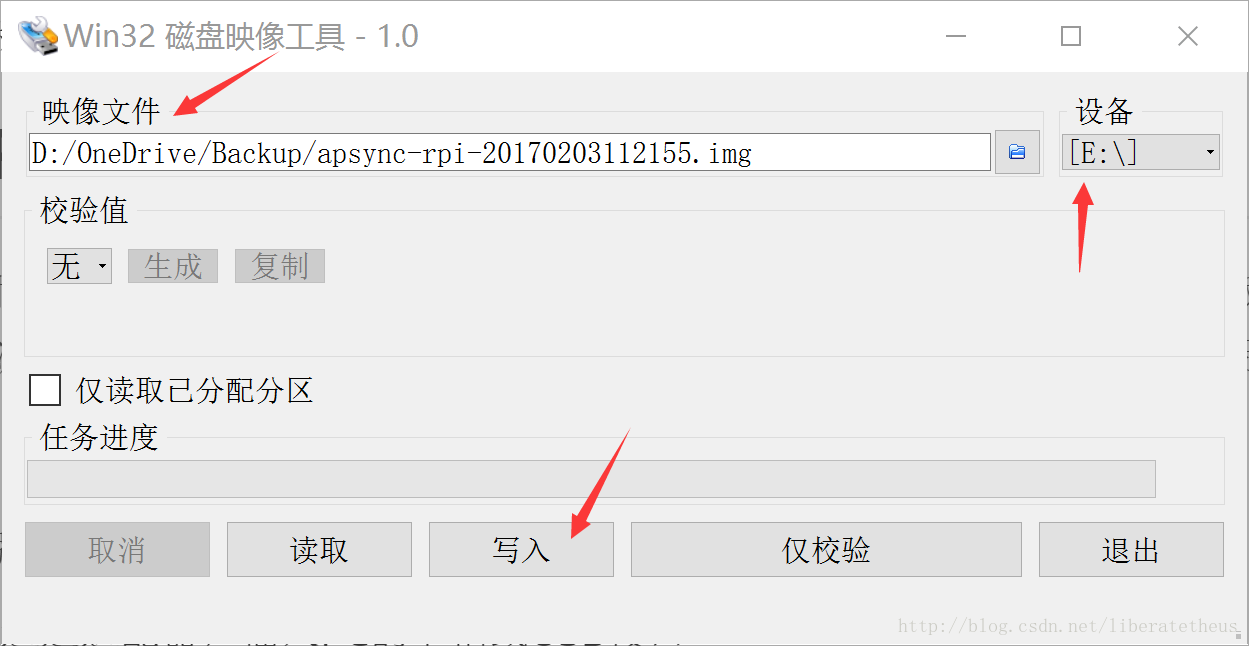
打开Win32DiskImager,“映像文件”选择下载的apsync-rpi,“设备”选择SD卡所对应的盘符,之后点击“写入”
APSync写入SD卡成功后,将SD卡插入树莓派的卡槽
设置飞控参数
将飞控的端口使能、设置正确的波特率之后,才能够与树莓派建立通信。以下设置可以在MissionPlanner->软件设置->全部参数设置中完成。
# Telem2端口使能
SERIAL2_PROTOCOL = 1
# 设置端口波特率(921600)
SERIAL2_BAUD = 921
# 可选设置
# 在树莓派上创建DataFlash Log日志(该日志与飞控SD卡上记录的飞行日志相同)
# 设置后,可在/home/user/dflogger/dataflash下找到飞行日志
LOG_BACKEND_TYPE = 3
设置完成后,需重启飞控使设置生效。
连接树莓派的无线网
APSync将树莓派板载的无线网卡作为无线热点使用,我们可以使用笔记本电脑的无线网卡连接到树莓派。之后,即可将飞控无线连接到地面站、通过树莓派访问互联网、通过SSH登录树莓派终端、或是使用FileZilla在本地和树莓派之间传输文件。
为树莓派和飞控上电。打开你笔记本电脑的无线网络配置,找到名为ardupilot的无线网络,使用enRouteArduPilot作为密码连接。
无线连接到地面站
APSync为树莓派配置了数据转发服务,可以通过WiFi无线连接到飞控,使树莓派拥有数传的功能。
- 打开MissionPlanner地面站,在右上角选择“UDP”,点击“Connect”
- 在端口设置中,输入14550,确认
如下图所示

若连接成功,即可像USB连接、数传连接时一样,查看并配置飞控信息。
通过树莓派访问互联网
如果将树莓派的以太网网口通过网线接到任意路由器后,树莓派即可访问互联网。同时,连接到树莓派WiFi的其他PC也可以像连接到普通的无线路由器一样,直接访问网络。
通过SSH登录树莓派终端
连接到树莓派提供的无线网后,我们通过SSH登陆树莓派的终端。登陆信息为
- IP:10.0.1.128
- 账户:apsync
- 密码:apsync
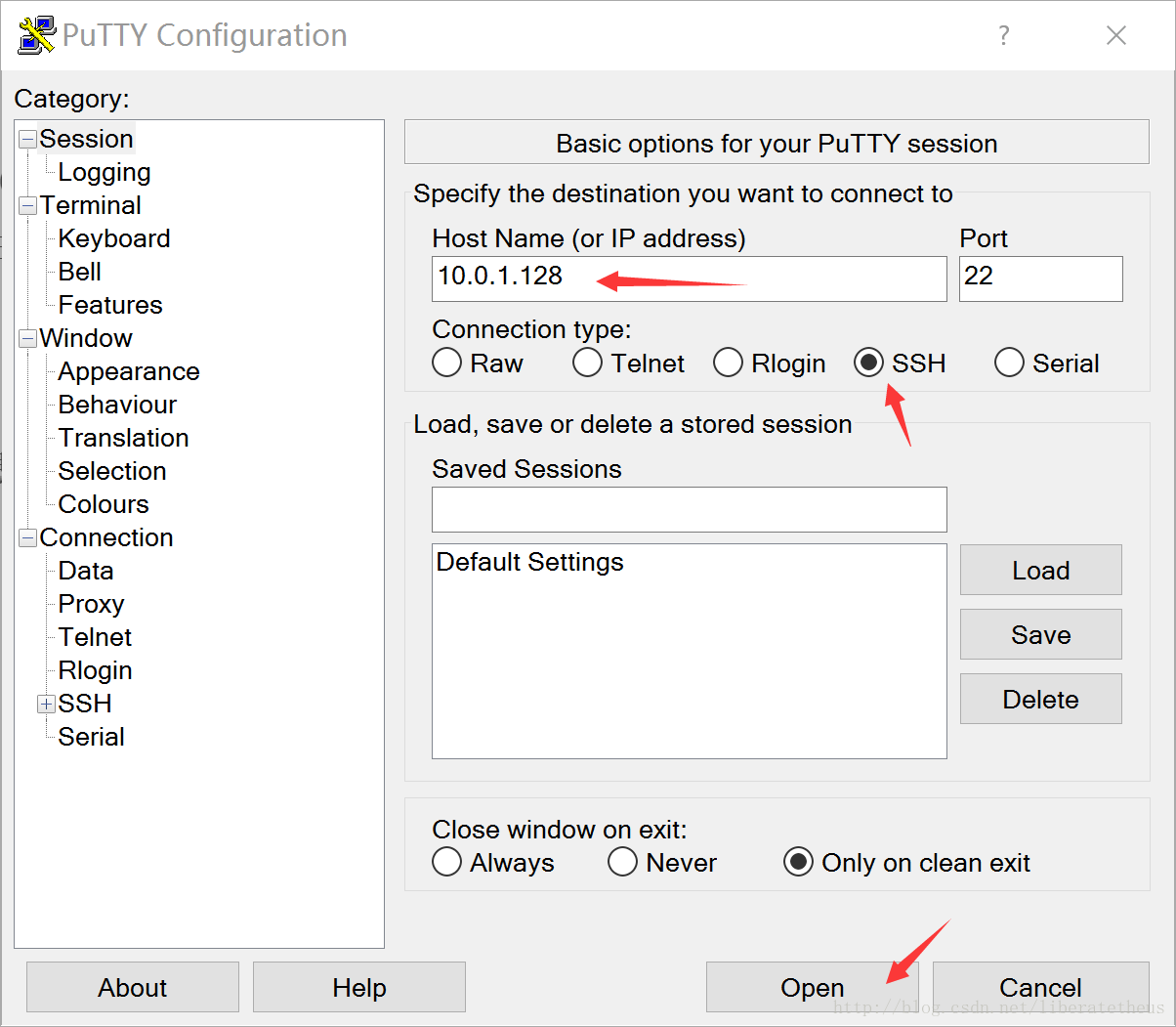
此处讲解如何使用PuTTY通过SSH登陆树莓派。
下载PuTTY(32位,64位)
打开PuTTY,选择SSH(默认),在地址栏输入10.0.1.128,点击Open
若是初次连接,会跳出安全提示,确认即可
输入用户名和密码,注意密码不会显示
登陆后,即可对树莓派进行配置、运行程序。
使用FileZilla传输文件
FileZilla可以将PC本地编写的代码上传到树莓派,同时也可以从树莓派上下载飞行日志等数据文件。
下载FileZilla(32位,64位)并安装
打开FileZilla,输入信息并登陆:
- sftp://10.0.1.128
- apsync
- apsync
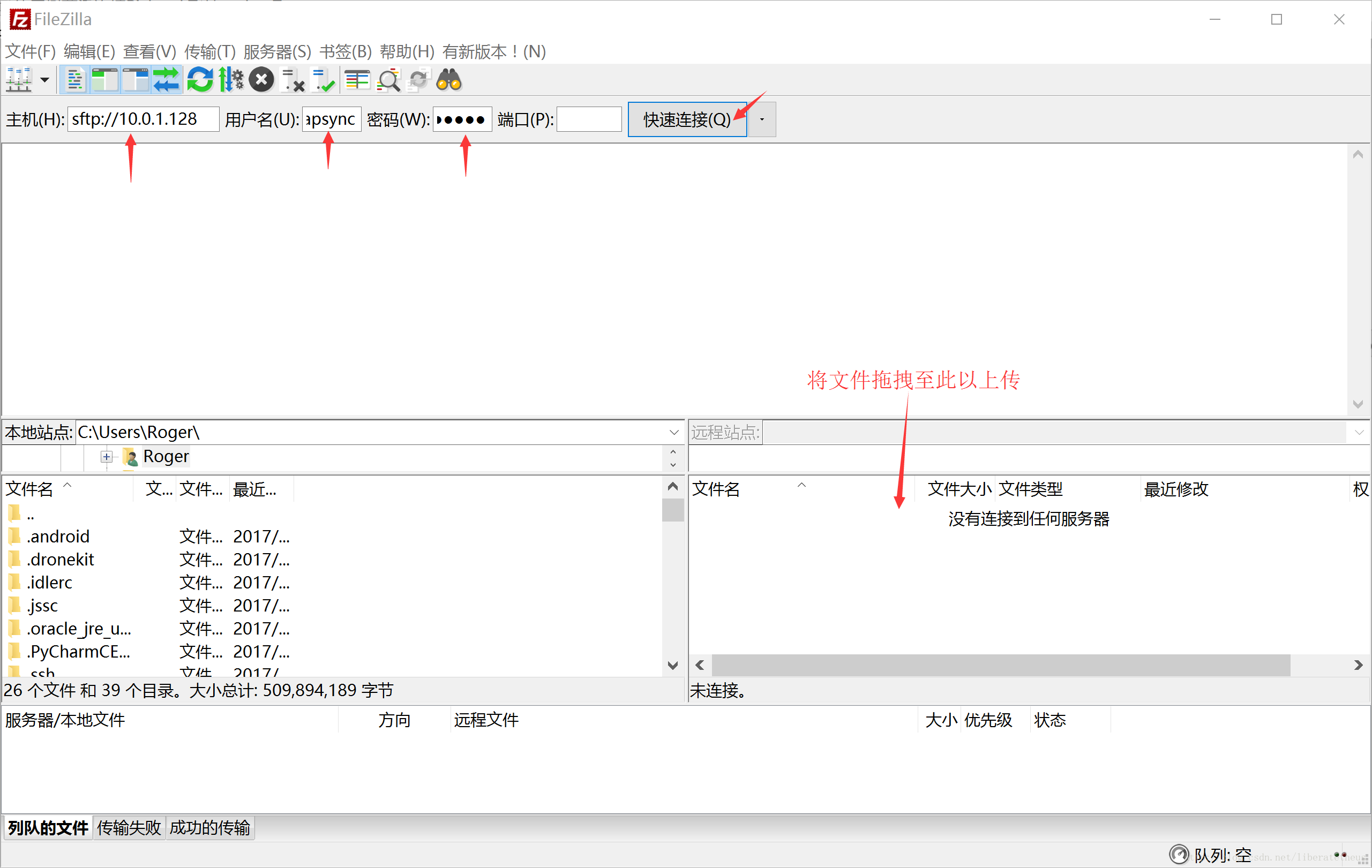
可以像访问Windows下的文件夹一样,通过FileZilla访问树莓派的文件了
注意当前用户是否具有读/写/执行的权限!如果权限不足,FileZilla会提示“Permission Denied”
其他功能
APSync还具有视频传输、网页配置等功能,详见此页面(英文)。
版本信息
1.0 20170913 initial commit
 本作品采用知识共享署名-相同方式共享 3.0 未本地化版本许可协议进行许可。
本作品采用知识共享署名-相同方式共享 3.0 未本地化版本许可协议进行许可。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)