采用福斯i6s遥控
1.连接飞控
打开遥控器,接收机插上飞控,再插上送的短接线,进行匹配对码RX 2.遥控器长按两秒锁,system-output mode
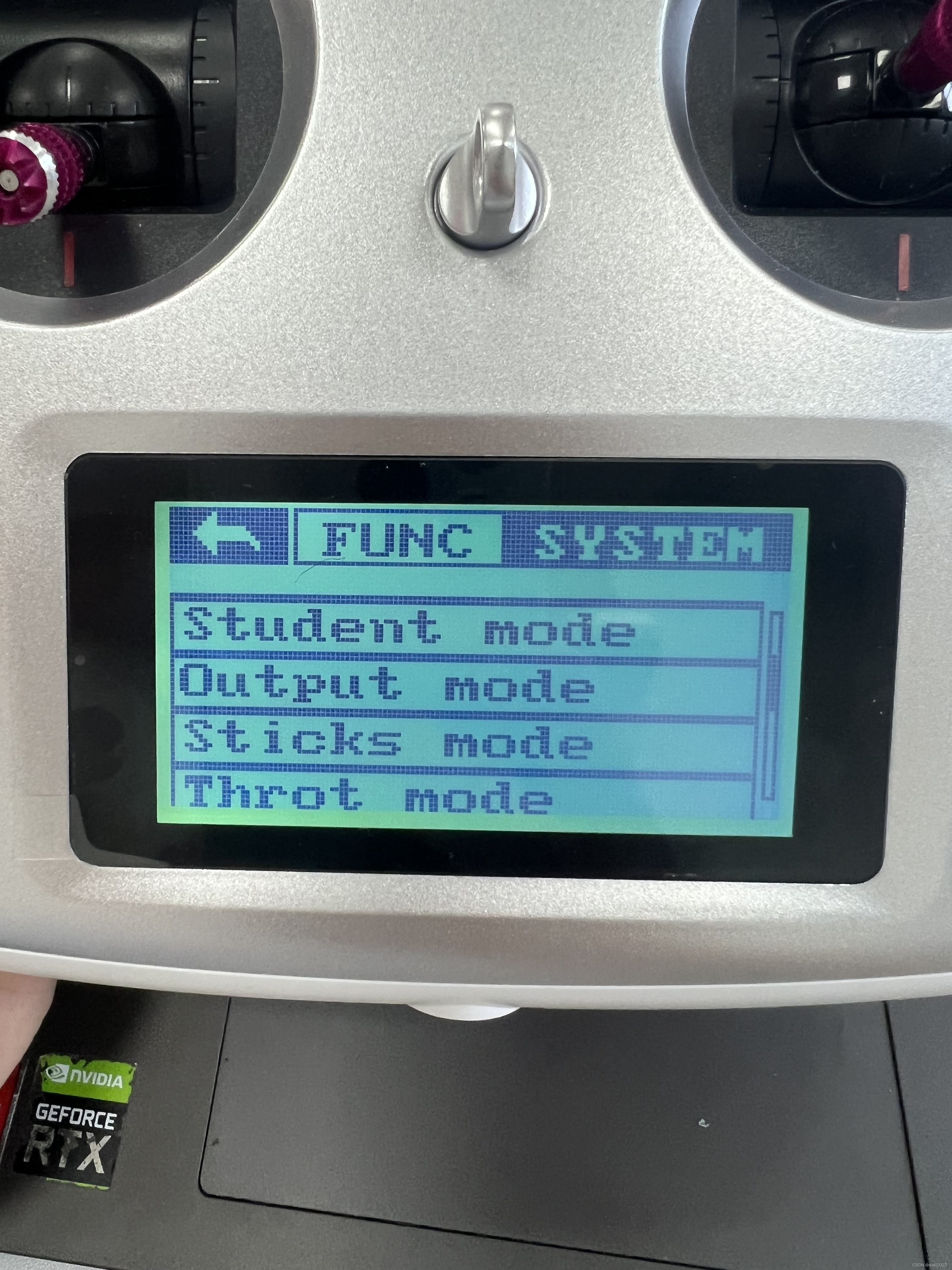

Output mode按照图片这样勾选。
接收机ch1插上pixhawk4上PPM RC接口
随后system最上方的RX bind,连接就ok了

2.遥控器校准
QGC校准教程有很多,主要是油门,方向和俯仰角那些,校准选择mode2(左手油门)
3.飞行模式设置
QGC校准完遥控器后进行。
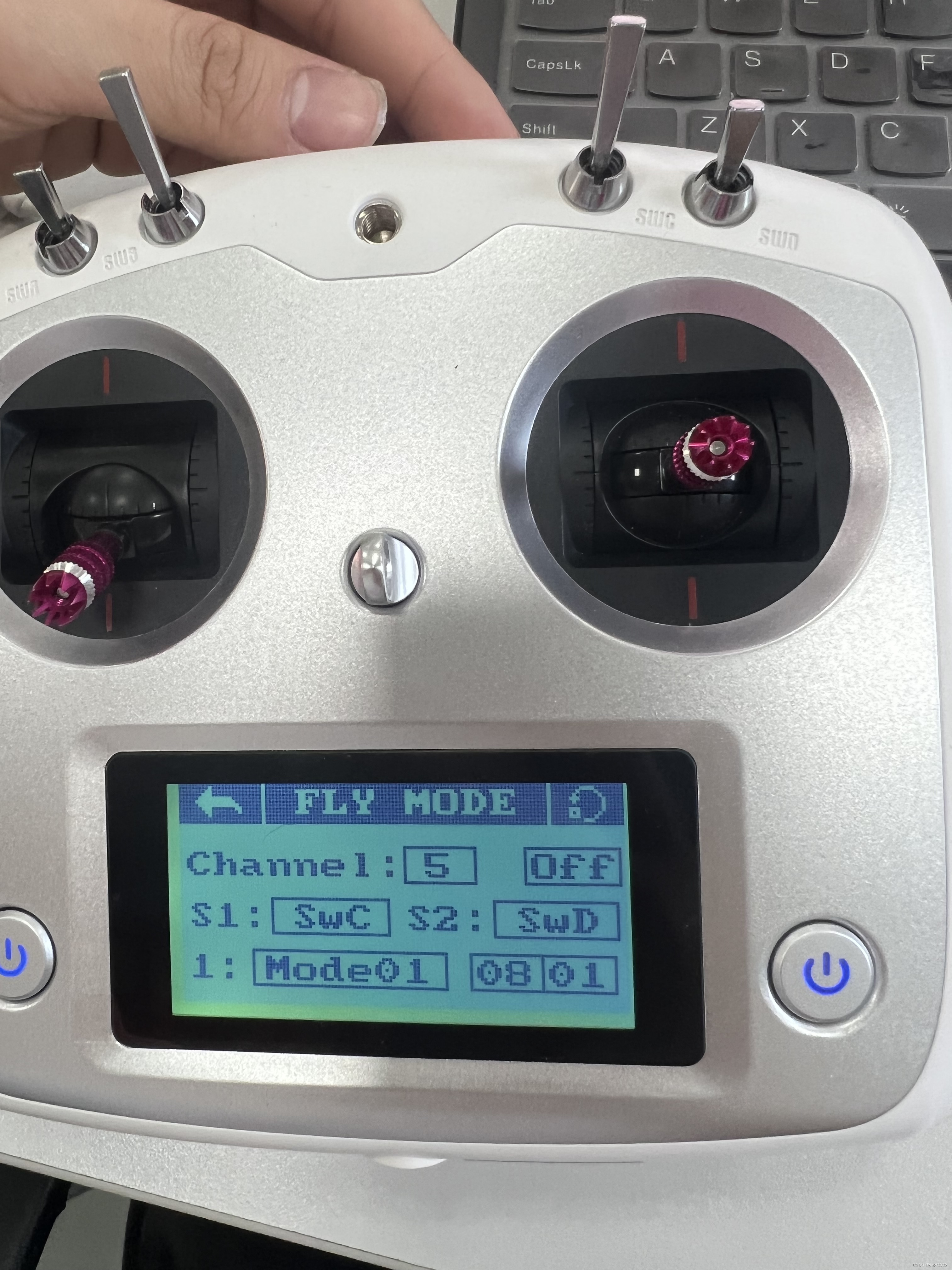
解锁界面,点击flight mode 按照流程,先设置channel为5通道。S1和S2设置自己喜欢的拨码开关,我设置的是右上角两个拨码开关。设置完成后,拨动开关,左下角的mode01会发生变化,此处连接QGC,从mode01开始,修改右下角的value 08,修改到QGC上面也显示再flight mode1为止。以此类推,往mode02,mode03修改,右下角的value 01好像不起作用,暂时不管。
4.最重要的锁桨

在AUX.CHAN中设置channel 6为SWA拨码开关(按照顺手修改)
随后进入QGC界面,Flight mode界面。

右侧从上往下第二个参数就是锁桨开关,选择刚刚遥控器上设置的的channel 6,测试一下,有油门中是否可以锁桨。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)