写在前面:
- 大多数情况下,没有人比官方更懂官方,所以编译安装、库配置及简单使用优先看官方github仓库README或者官网,当然不排除有些博文或者教程有更好的表达方式更详细的说明
- cmake 编译三件套(通常情况下)
cd LIB
mkdir build
cmake ..
make
sudo make install
3.cmake 配置三件套(通常情况下)
find_package(LIB REQUIRED)
include_directories(${LIB_INCLUDE_DIRS})
list(APPEND THIRD_PART_LIBRARIES ${LIB_LIBRARIES})
ubuntu系统
- 编译安装
18.04.6版本 releases.ubuntu.com/18.04 (相对.04版本更稳定一些) - 其他说明
18.04.6版本默认内核5.4,如遇无法正常外接显示器等硬件驱动问题,可尝试在kernel.ubuntu.com/~kernel-ppa/mainline/ 下载安装升级linux 内核至5.15(5.15为长期支持的内核发行版本)进行适配
ROS系统
- 编译安装
wiki.ros.org/melodic/Installation/Ubuntu - 使用教程
wiki.ros.org/ROS/Tutorials - 其他说明
ros所预装的第三库版本诸如opencv、cmake、pcl等详细信息可查询 www.ros.org/reps/rep-0003.html
ros melodic第三方库版本见下图:
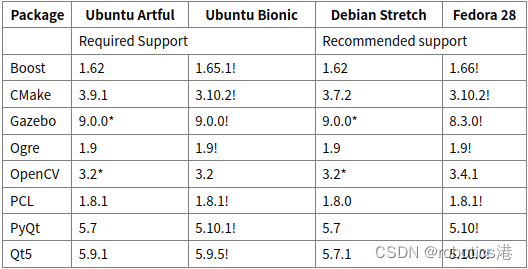
cmake
- 编译安装
ros melodic默认cmake 3.10.2
github.com/Kitware/CMake
source code 脚本编译安装
使用教程
Cmake Practice
其他说明
cmake版本升级直接装新版本即可 ,不需要卸载老版本
版本查询 cmake --version
点云处理库 PCL
- 编译安装
ros melodic默认pcl 1.8.1 - cmake配置
find_package(PCL 1.8 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
list(APPEND THIRD_PART_LIBRARIES ${PCL_LIBRARIES})
地理日志库 GeographicLib
- 编译安装
geographiclib.sourceforge.io
cmake方式编译 - cmake配置
find_package (GeographicLib REQUIRED)
include_directories(${GeographicLib_INCLUDE_DIRS})
list(APPEND THIRD_PART_LIBRARIES ${GeographicLib_LIBRARIES})
日志库 google glog
- 编译安装
github.com/google/glog
cmake 方式编译 - cmake配置
find_package (glog 0.6.0 REQUIRED)
list(APPEND THIRD_PART_LIBRARIES glog::glog)
yaml参数配置库 yaml-cpp
- 编译安装
github.com/jbeder/yaml-cpp
cmake 方式编译 - cmake配置
find_package (yaml-cpp REQUIRED)
include_directories(${YAML_CPP_INCLUDE_DIRS})
list(APPEND THIRD_PART_LIBRARIES ${YAML_CPP_LIBRARIES}) - 使用教程
github.com/jbeder/yaml-cpp/wiki/Tutorial
版本查询 pkg-config yaml-cpp --modversion
点云分析软件 CloudCompare
- 编译安装
通过www.cloudcompare.org/release/index.html说明可知
采用snap安装
snap install cloudcompar
slam轨迹评估工具
pip install evo --upgrade --no-binary evo
- 使用教程
github.com/MichaelGrupp/evo/wiki - 其他说明
安装成功测试
evo
版本查询
evo pkg --version
非线性优化库g2o
find_package( g2o REQUIRED )
include_directories( ${G2O_INCLUDE_DIRS} )
set(G2O_LIBS g2o_cli g2o_ext_freeglut_minimal g2o_simulator g2o_solver_slam2d_linear g2o_types_icp g2o_types_slam2d g2o_core g2o_interface g2o_solver_csparse g2o_solver_structure_only g2o_types_sba g2o_types_slam3d g2o_csparse_extension g2o_opengl_helper g2o_solver_dense g2o_stuff g2o_types_sclam2d g2o_parser g2o_solver_pcg g2o_types_data g2o_types_sim3 cxsparse )
list(APPEND THIRD_PART_LIBRARIES ${G2O_LIBS})
- 使用教程
slam14讲等 - 其他说明
应用时版本造成的问题较多
3D模型绘制 freecad
- 编译安装
github.com/FreeCAD/FreeCAD
sudo add-apt-repository ppa:freecad-maintainers/freecad-stable
sudo apt-get update
sudo apt install freecad
sudo apt install freecad --fix-missing
- 使用教程
wiki.freecadweb.org/Tutorials - 其他说明
开源免费,相比SW轻量化
PCB绘制 kicad
- 编译安装
按官方说明安装即可
www.kicad.org/download/ - 使用教程
- 其他说明
开源免费,相比AD轻量化,LCEDA也不错但是无法离线
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)