1.在电脑上登录自己CSDN账号; 2.按如下指示操作:鼠标滑动至头像处,点击下方的内容管理;
1.在电脑上登录自己CSDN账号;
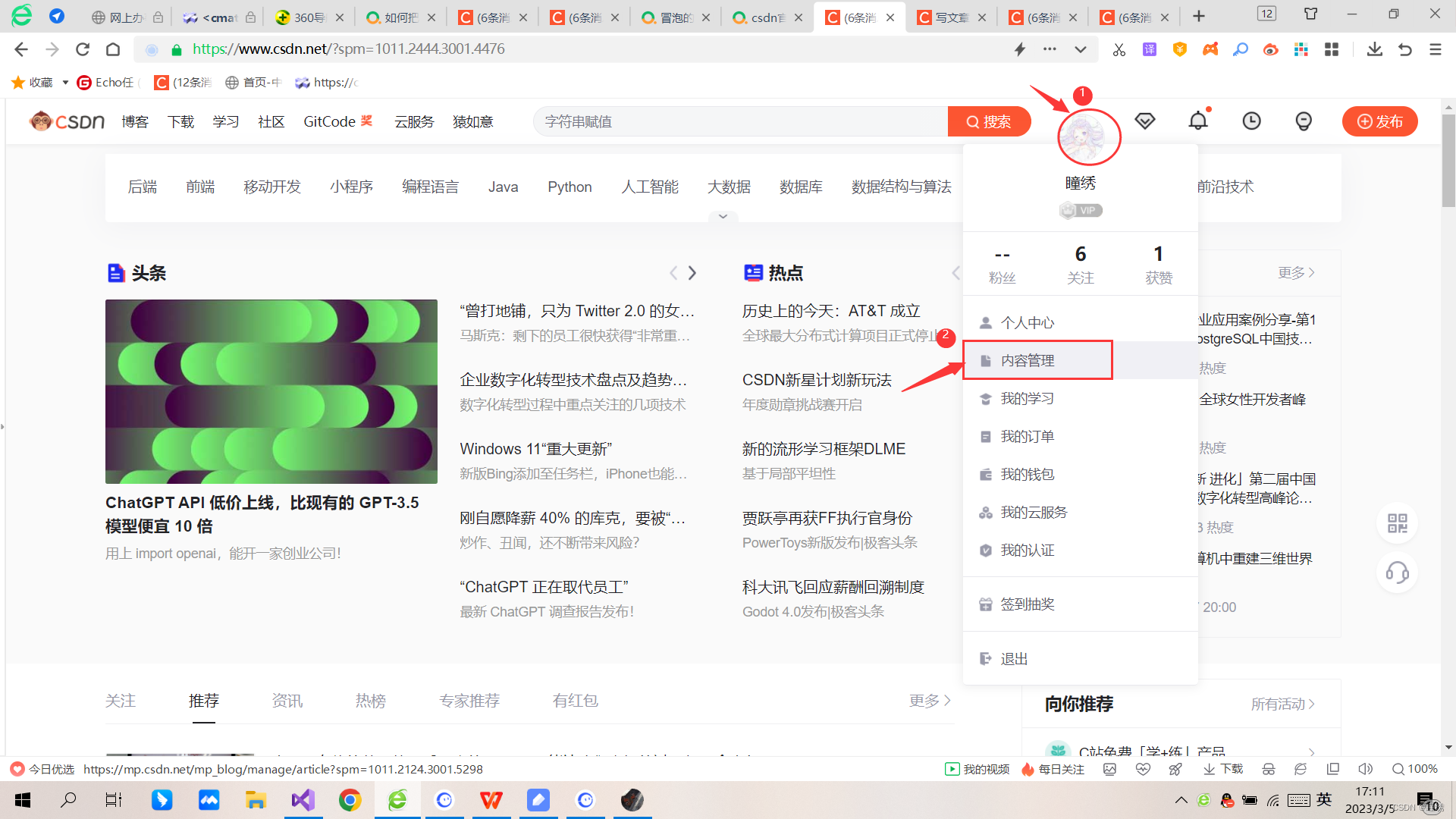
2.按如下指示操作:鼠标滑动至头像处,点击下方的内容管理;
3. 在左方中一直下滑,找到设置中的博客设置;
4.在代码样式片中选择自己喜欢的样式;